También podría gustarte
- Ecuaciones Diferenciales Lineales Homogéneas de Coeficientes ConstantesDocumento8 páginasEcuaciones Diferenciales Lineales Homogéneas de Coeficientes ConstantesMariel MoralesAún no hay calificaciones
- Ejercicios de Ecuaciones Diferenciales OrdinariasDe EverandEjercicios de Ecuaciones Diferenciales OrdinariasCalificación: 4 de 5 estrellas4/5 (1)
- EDO de Orden SuperiorDocumento12 páginasEDO de Orden SuperiorAbigail ZuñigaAún no hay calificaciones
- Monografia - Ecuaciones Diferenciales FinalDocumento26 páginasMonografia - Ecuaciones Diferenciales FinalOlmedoCardenasFlores75% (4)
- Fuerza CentralesDocumento40 páginasFuerza CentralesgouthpeAún no hay calificaciones
- Mis Notas de Clase - Cálculo Integral 13 de Septiembre de 2015Documento102 páginasMis Notas de Clase - Cálculo Integral 13 de Septiembre de 2015José Barros Troncoso80% (5)
- Ecuaciones Diferenciales Ordinarias - Ana Isabel Alonso de MenaDocumento258 páginasEcuaciones Diferenciales Ordinarias - Ana Isabel Alonso de MenaJorge MoralesAún no hay calificaciones
- Regulador Lineal Cuadrático OptimoDocumento7 páginasRegulador Lineal Cuadrático OptimoBru Cervantes AnayaAún no hay calificaciones
- Ecuaciones diferenciales linealesDocumento15 páginasEcuaciones diferenciales linealesEdson SusanibarAún no hay calificaciones
- S05.s1 Ecuaciones Lineales de Orden Superior HomogeneasDocumento21 páginasS05.s1 Ecuaciones Lineales de Orden Superior HomogeneasMariela MacoAún no hay calificaciones
- 4 ED de Orden SuperiorDocumento8 páginas4 ED de Orden Superioresteban.israel.rdzAún no hay calificaciones
- Ecuaciones Diferenciales CIPAS I - UNIDAD IIDocumento33 páginasEcuaciones Diferenciales CIPAS I - UNIDAD IICarlos Andrés Lagos PinoAún no hay calificaciones
- 100418-318 44150358 Diana-RangelDocumento15 páginas100418-318 44150358 Diana-RangeldianaAún no hay calificaciones
- Diseño de Redes de DistribuciónDocumento10 páginasDiseño de Redes de DistribuciónJean SparrowAún no hay calificaciones
- 4.2 Ecuaciones Lineales Homogéneas Con Coeficientes ConstantesDocumento8 páginas4.2 Ecuaciones Lineales Homogéneas Con Coeficientes ConstantesLuis ColdAún no hay calificaciones
- Edi-Cap 02 2021iiDocumento39 páginasEdi-Cap 02 2021iiJosue UrciaAún no hay calificaciones
- Capítulo 1 EDI v3Documento29 páginasCapítulo 1 EDI v3Cesar Galán PurizacaAún no hay calificaciones
- Ejercicio 1 - 3 Literal C - 4 Colaborativo, Link VideoDocumento6 páginasEjercicio 1 - 3 Literal C - 4 Colaborativo, Link VideoEdinson SarriaAún no hay calificaciones
- EjerciciosNº1OscilacionesDocumento37 páginasEjerciciosNº1OscilacionesHC EdithAún no hay calificaciones
- Homogéneas y BernoulliDocumento17 páginasHomogéneas y BernoulliAdrianAún no hay calificaciones
- Edi-Cap 02 2021ii-2Documento39 páginasEdi-Cap 02 2021ii-2Tama Wants To BatoruAún no hay calificaciones
- Notas 2Documento26 páginasNotas 2Nicole tolozaAún no hay calificaciones
- EcuacionesDiferencialesHomogeneasNoHomogeneasDocumento13 páginasEcuacionesDiferencialesHomogeneasNoHomogeneasCristian PradaAún no hay calificaciones
- EcuacionesDiferencialesSegundoOrdenDocumento27 páginasEcuacionesDiferencialesSegundoOrdenJosé Antonio Flores QuispeAún no hay calificaciones
- 236 - Fase 3Documento29 páginas236 - Fase 3Estefani CamachoAún no hay calificaciones
- Tarea de Calculo N2Documento8 páginasTarea de Calculo N2Matias EduardoAún no hay calificaciones
- s02.s1 - Material. Ecuaciones Diferenciales ExactasDocumento20 páginass02.s1 - Material. Ecuaciones Diferenciales ExactasCesar Antonio LoayzaAún no hay calificaciones
- 1.capitulo IDocumento3 páginas1.capitulo IEDWIN ALVAREZ MAMAMNIAún no hay calificaciones
- Ecuaciones Diferenciales NOTA 7 II 2021Documento7 páginasEcuaciones Diferenciales NOTA 7 II 2021franciscoAún no hay calificaciones
- Ecuaciones Lineales 2 PDFDocumento7 páginasEcuaciones Lineales 2 PDFClaudia Ala AndiaAún no hay calificaciones
- Ejercicio C Ecuaciones Difernciales Series de PotenciaDocumento2 páginasEjercicio C Ecuaciones Difernciales Series de PotenciaVanessa JimenezAún no hay calificaciones
- S02.s1 - Material. ECUACIONES DIFERENCIALES EXACTASDocumento23 páginasS02.s1 - Material. ECUACIONES DIFERENCIALES EXACTASElga-tito FeoAún no hay calificaciones
- Unidad 2 y 3 EcuacionDocumento40 páginasUnidad 2 y 3 EcuacionElvis Alexis Leon LopezAún no hay calificaciones
- Cap 1 Ecuaciones Diferenciales 1er OrdenDocumento46 páginasCap 1 Ecuaciones Diferenciales 1er OrdenJoShUa PrOAún no hay calificaciones
- Sol de Una EDODocumento9 páginasSol de Una EDOANGELICA HOLGUINLOPEZAún no hay calificaciones
- Ecuaciones direncialesDocumento26 páginasEcuaciones direncialesDaniel Andres Medina BarriosAún no hay calificaciones
- 1ro Medio A y B Matemática PPT N°4 01 de Julio.Documento15 páginas1ro Medio A y B Matemática PPT N°4 01 de Julio.Rober Euclides Muñoz RoblesAún no hay calificaciones
- Contenido - S7Documento43 páginasContenido - S7Paul MuñozAún no hay calificaciones
- Ecuaciones diferenciales homogéneasDocumento16 páginasEcuaciones diferenciales homogéneasDeysy ReyesAún no hay calificaciones
- 43 - 1118818482 - Lorena PertuzDocumento17 páginas43 - 1118818482 - Lorena PertuzLORENA MARGARITA PERTUZ PALMERAAún no hay calificaciones
- Tarea 4 - Grupo - 100412 - 57Documento26 páginasTarea 4 - Grupo - 100412 - 57LEO JMDAún no hay calificaciones
- Ed LoaizaDocumento13 páginasEd LoaizaAnonymous YjQu4yAún no hay calificaciones
- UnadDocumento24 páginasUnadJHON FREDY ZAMBRANO MEJIAAún no hay calificaciones
- Jipc U2act1Documento6 páginasJipc U2act1Josue IsaiAún no hay calificaciones
- Clase Semana 2 - Parte IDocumento9 páginasClase Semana 2 - Parte IrafueliuxAún no hay calificaciones
- S04.s1 Repaso PC1-1 PDFDocumento18 páginasS04.s1 Repaso PC1-1 PDFArmando Eduardo RodriguezAún no hay calificaciones
- S04.s1 Repaso PC1Documento18 páginasS04.s1 Repaso PC1Olger Aragon BerlangaAún no hay calificaciones
- ECUA DIF Ecuaciones Diferenciales de Orden SuperiorDocumento37 páginasECUA DIF Ecuaciones Diferenciales de Orden SuperiorJohn Alain Stanley Viraca VegaAún no hay calificaciones
- Cauchy - Euler 2022Documento16 páginasCauchy - Euler 2022Brandon HuggAún no hay calificaciones
- clasificación y métodos de solución de ecuaciones diferencialesDocumento8 páginasclasificación y métodos de solución de ecuaciones diferencialesCAMPOS RAMIREZ LUIS ERNESTOAún no hay calificaciones
- Mat1207ae Tema1-1Documento11 páginasMat1207ae Tema1-1wtfhuntermAún no hay calificaciones
- Mat1207ae Tema1-1Documento11 páginasMat1207ae Tema1-1Misael GarcíaAún no hay calificaciones
- Contenido C1 - S7Documento17 páginasContenido C1 - S7Paul MuñozAún no hay calificaciones
- Ecuaciones Diferenciales - Fase 2Documento17 páginasEcuaciones Diferenciales - Fase 2Javier Triana100% (2)
- Ejercicios Resueltos Ecuaciones Diferenciales (Euler)Documento7 páginasEjercicios Resueltos Ecuaciones Diferenciales (Euler)Jesus PerezAún no hay calificaciones
- Unidad Ii Ecuaciones Diferenciales de Orden SuperiorDocumento4 páginasUnidad Ii Ecuaciones Diferenciales de Orden SuperiorHazelupita Gutierrez AldanaAún no hay calificaciones
- Mat 1207ae Tema - 1-1eDocumento7 páginasMat 1207ae Tema - 1-1eAbraham Huanca QuispeAún no hay calificaciones
- A. GUÍA Ecuaciones de Orden Superior Parte IDocumento5 páginasA. GUÍA Ecuaciones de Orden Superior Parte ILUIS acaAún no hay calificaciones
- Contenido Clase Nº11Documento15 páginasContenido Clase Nº11Daniel TorresAún no hay calificaciones
- Métodos Solución EDODocumento36 páginasMétodos Solución EDODenny ProañoAún no hay calificaciones
- Material 1 Ecuaciones Dif Primer Orden 03-08-21Documento4 páginasMaterial 1 Ecuaciones Dif Primer Orden 03-08-21Mauro Bruno Figueroa ChávezAún no hay calificaciones
- Tarea NomenclaturaDocumento6 páginasTarea NomenclaturaHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- DECLINACIÓN MAGNETICA (Fierro Loyola, Omar Cesar)Documento11 páginasDECLINACIÓN MAGNETICA (Fierro Loyola, Omar Cesar)HUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Cálculo de la declinación magnéticaDocumento14 páginasCálculo de la declinación magnéticaHUMBERTO APACLLA LOAYZAAún no hay calificaciones
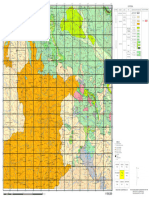
- Cuadrangulo - Chota - 100kDocumento1 páginaCuadrangulo - Chota - 100kHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Introduccion A La Geologia Estructural y Las Disciplinas GeologicasDocumento18 páginasIntroduccion A La Geologia Estructural y Las Disciplinas GeologicasEvelin Karla Mamani ArroyoAún no hay calificaciones
- Cuadrante - Celendin - 100kDocumento1 páginaCuadrante - Celendin - 100kHUMBERTO APACLLA LOAYZAAún no hay calificaciones
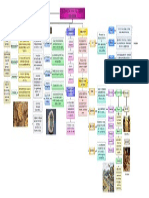
- Docsity Cuadro Conceptual PoriferosDocumento2 páginasDocsity Cuadro Conceptual PoriferosHUMBERTO APACLLA LOAYZA100% (1)
- Fallas geológicas UNMSMDocumento23 páginasFallas geológicas UNMSMEvelin Karla Mamani ArroyoAún no hay calificaciones
- Hemicordados: Phylum HemichordataDocumento33 páginasHemicordados: Phylum HemichordataGIOVANI MAICOL BAQUERIZO REVOLLARAún no hay calificaciones
- 22 HolografíaDocumento6 páginas22 HolografíaHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Cuadrangulo - Chota - 100kDocumento1 páginaCuadrangulo - Chota - 100kHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Examen Parcial de FisicaDocumento2 páginasExamen Parcial de FisicaHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Ecosistema MarinoDocumento1 páginaEcosistema MarinoHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- DIBUSCRITOSDocumento40 páginasDIBUSCRITOSHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- ArrecifesDocumento11 páginasArrecifesHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- ML 01 Autores Sobre La Paleontologia PeruanaDocumento14 páginasML 01 Autores Sobre La Paleontologia PeruanaHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Parcial - Segunda ParteDocumento1 páginaParcial - Segunda ParteHUMBERTO APACLLA LOAYZAAún no hay calificaciones
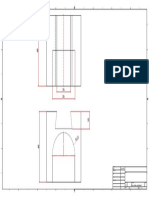
- Dos Vistas Acotadas 2Documento1 páginaDos Vistas Acotadas 2HUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Paleontología PeruanaDocumento13 páginasPaleontología PeruanaStefanysevillanosAún no hay calificaciones
- MC4 - Eliana JimenezDocumento1 páginaMC4 - Eliana JimenezHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Foto Interpretación en Google Earth: Práctica VirtualDocumento5 páginasFoto Interpretación en Google Earth: Práctica VirtualHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Descripción Macroscópica de Rocas Ígneas Intrusivas o PlutónicasDocumento9 páginasDescripción Macroscópica de Rocas Ígneas Intrusivas o PlutónicasHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Semana 5-Potencial ElectricoDocumento7 páginasSemana 5-Potencial ElectricoHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Biomarcadores Fósiles - JimenezDocumento14 páginasBiomarcadores Fósiles - JimenezHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Cálculo III-sem 2 (T)Documento20 páginasCálculo III-sem 2 (T)HUMBERTO APACLLA LOAYZAAún no hay calificaciones
- RE Tdela TO de Físi I: EX EN #02: Us de in R Taónyma Al en EL RIDDocumento4 páginasRE Tdela TO de Físi I: EX EN #02: Us de in R Taónyma Al en EL RIDHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Silabo Calculo III Plan 2018 (2021-II)Documento7 páginasSilabo Calculo III Plan 2018 (2021-II)HUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Análisis cualitativo de minerales en la UNMSMDocumento12 páginasAnálisis cualitativo de minerales en la UNMSMHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Mapa Topográfico Salida de Campo 1: LeyendaDocumento1 páginaMapa Topográfico Salida de Campo 1: LeyendaHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- SÍLABO Geometria Descriptiva 2020-I VicirrectoradoDocumento6 páginasSÍLABO Geometria Descriptiva 2020-I VicirrectoradoHUMBERTO APACLLA LOAYZAAún no hay calificaciones
- Ecuaciones diferenciales ordinarias de primer ordenDocumento183 páginasEcuaciones diferenciales ordinarias de primer ordenLuis LemusAún no hay calificaciones
- Problemas de EDO 2o de MatemáticasDocumento4 páginasProblemas de EDO 2o de MatemáticasMariaAún no hay calificaciones
- Práctica de Cálculo IIIDocumento6 páginasPráctica de Cálculo IIIFranco JorgeAún no hay calificaciones
- Análisis matemático librosDocumento17 páginasAnálisis matemático librosDario CaparròzAún no hay calificaciones
- Ecuacion AuxiliarDocumento10 páginasEcuacion AuxiliarKevin VivarezAún no hay calificaciones
- Tema 1.2 Variables Separables y F.IDocumento14 páginasTema 1.2 Variables Separables y F.IEduardo NuñezAún no hay calificaciones
- Ecuaciones Diferenciales - P2Documento27 páginasEcuaciones Diferenciales - P2WALTER SUEL ARROYOAún no hay calificaciones
- S1 DiapositivasDocumento66 páginasS1 DiapositivasEduardo MendozaAún no hay calificaciones
- LIBRO Nº4 - Matematicas IVDocumento186 páginasLIBRO Nº4 - Matematicas IVabdddddddAún no hay calificaciones
- Informe de Ecuaciones DiferencialesDocumento7 páginasInforme de Ecuaciones DiferencialesLuis SubiagaAún no hay calificaciones
- Pre-Tarea - Cuestionario InicialDocumento4 páginasPre-Tarea - Cuestionario InicialjualdacamAún no hay calificaciones
- Clase 3 Capítulo 2 (Tarea # 2)Documento16 páginasClase 3 Capítulo 2 (Tarea # 2)Faber Andres Calderon HenaoAún no hay calificaciones
- Ensayo - Modelo MatemáticoDocumento15 páginasEnsayo - Modelo MatemáticoPanter RizzAún no hay calificaciones
- Ecuaciones Diferenciales Actividad Eje 2Documento11 páginasEcuaciones Diferenciales Actividad Eje 2Sandra Gómez TovarAún no hay calificaciones
- Ejemplo Ec CalorDocumento4 páginasEjemplo Ec CalorOscar MarínAún no hay calificaciones
- Notas MinzoniDocumento202 páginasNotas MinzoniAlejandra AguirreAún no hay calificaciones
- LyapunovDocumento23 páginasLyapunovlu casAún no hay calificaciones
- Ecuaciones lineales de primer ordenDocumento23 páginasEcuaciones lineales de primer ordenjose2182Aún no hay calificaciones
- Silabo Mmf1 2023A TORIBIODocumento5 páginasSilabo Mmf1 2023A TORIBIOmemessAún no hay calificaciones
- CE89 - Problemas para Foro - Sem 2 - 2020 - 1ADocumento3 páginasCE89 - Problemas para Foro - Sem 2 - 2020 - 1ARafael TrujilloAún no hay calificaciones
- Temario EDO de Orden SuperiorDocumento42 páginasTemario EDO de Orden SuperiorLouie FigueroaAún no hay calificaciones
- Ecuaciones diferenciales ordinarias y sus aplicacionesDocumento15 páginasEcuaciones diferenciales ordinarias y sus aplicacionesWalter UbaldoAún no hay calificaciones
- Articulo 3Documento5 páginasArticulo 3Álvaro Jesús Camarena RamírezAún no hay calificaciones
- S06 S1 EjerciciosDocumento2 páginasS06 S1 EjerciciosJoel Max ArroyoAún no hay calificaciones
- Trabajo Colaborativo Fase 3 Grupo 100412 31Documento26 páginasTrabajo Colaborativo Fase 3 Grupo 100412 31Mindy CaroAún no hay calificaciones