También podría gustarte
- Formato de Requisición de PúestoDocumento2 páginasFormato de Requisición de PúestoMartha100% (2)
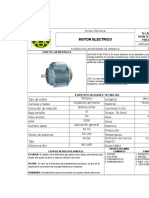
- Ficha Tecnica Motor ElectricoDocumento4 páginasFicha Tecnica Motor ElectricoAlexander Lopez LondoñoAún no hay calificaciones
- LVSIM EjercicioDocumento22 páginasLVSIM EjercicioJoel de la CruzAún no hay calificaciones
- Alimentadores MotoresDocumento12 páginasAlimentadores Motoresa10222e67% (3)
- Mtto Predictivo Motores ElectricosDocumento47 páginasMtto Predictivo Motores ElectricosgelebraAún no hay calificaciones
- Examen Modelos Matematicos para La ProduccionDocumento6 páginasExamen Modelos Matematicos para La ProduccionDanny UitzAún no hay calificaciones
- Emprendimiento ProductivoDocumento15 páginasEmprendimiento ProductivoPC Tzul25% (4)
- CAPITULO6 Prot TransformDocumento31 páginasCAPITULO6 Prot TransformWilmer GonzalezAún no hay calificaciones
- Cálculo de La Caída de Tensión en Los Terminales Del Motor Durante El ArranqueDocumento1 páginaCálculo de La Caída de Tensión en Los Terminales Del Motor Durante El ArranqueluisAún no hay calificaciones
- Arranque de MotoresDocumento8 páginasArranque de MotoresLuis PulidoAún no hay calificaciones
- Capitulo 10 ProteccionesDocumento19 páginasCapitulo 10 Proteccionescarlos adrian torres nuñezAún no hay calificaciones
- Est. Prot. AquapectecDocumento27 páginasEst. Prot. AquapectecYesenia Torres GarridoAún no hay calificaciones
- Maq Leccion 3-METODOS DE ARRANQUEDocumento46 páginasMaq Leccion 3-METODOS DE ARRANQUEJeroen van HoofAún no hay calificaciones
- Cálculo de Protección de Transformador de PotenciaDocumento31 páginasCálculo de Protección de Transformador de PotenciaPedro Jose Méndez Marquez100% (3)
- Protocolo de Pruebas de Los Generadores S Ncronos PDFDocumento0 páginasProtocolo de Pruebas de Los Generadores S Ncronos PDFtalaporri100% (1)
- Coordinación de ProteccionesDocumento59 páginasCoordinación de Proteccionesroyvindas100% (1)
- Protocolo de Pruebas de Los Generadores S Ncronos 1 PDFDocumento68 páginasProtocolo de Pruebas de Los Generadores S Ncronos 1 PDFJerson Ronald Ydme BilbaoAún no hay calificaciones
- Datos de Placa de Motores EléctricosDocumento48 páginasDatos de Placa de Motores EléctricosRaúl Sánchez GonzalezAún no hay calificaciones
- Protección Por Sobrecarga en Variadores de Frecuencia: ArtículoDocumento1 páginaProtección Por Sobrecarga en Variadores de Frecuencia: ArtículoGianfranco Nestor Medina SanchezAún no hay calificaciones
- ProyectoDocumento10 páginasProyectoexquisito3xAún no hay calificaciones
- Proteccion de Motores Rosero VeronicaDocumento6 páginasProteccion de Motores Rosero VeronicaveronicaroseromorillAún no hay calificaciones
- Iii.2. Coordinación de Protecciones Contra Sobrecorrientes y 59N, J.V.DDocumento35 páginasIii.2. Coordinación de Protecciones Contra Sobrecorrientes y 59N, J.V.Djoselu45Aún no hay calificaciones
- Informe 2Documento10 páginasInforme 2KjtmAún no hay calificaciones
- Cap 3 Protecciones BT Interruptor TermomagneticoDocumento8 páginasCap 3 Protecciones BT Interruptor TermomagneticodiegoAún no hay calificaciones
- Memoria Explicativa Chironta CeladorDocumento18 páginasMemoria Explicativa Chironta Celadorfernando choqueAún no hay calificaciones
- Arranque Dinámico de Motores GrandesDocumento8 páginasArranque Dinámico de Motores GrandesfsnowsAún no hay calificaciones
- IIEE - Tema 10 - Protección y Comando Motores-Rev0Documento45 páginasIIEE - Tema 10 - Protección y Comando Motores-Rev0Sebastian BenitezAún no hay calificaciones
- Implementacion de Una Cabina de TransformaciónDocumento5 páginasImplementacion de Una Cabina de TransformaciónOliberOrellanaAún no hay calificaciones
- Mantenimiento Predictivo para Motores Eléctricos: Ing. William MurilloDocumento49 páginasMantenimiento Predictivo para Motores Eléctricos: Ing. William MurilloRicardo RGAún no hay calificaciones
- 2016 MAR - Estimando Datos de Placa de Un Motor Sin PlacaDocumento2 páginas2016 MAR - Estimando Datos de Placa de Un Motor Sin Placabotarato100% (1)
- 11.CAPITULO - XI Ejemplo - Coordinacion de ProteccionesDocumento32 páginas11.CAPITULO - XI Ejemplo - Coordinacion de ProteccionesMarco VasquezAún no hay calificaciones
- Trabajo MotoresDocumento11 páginasTrabajo MotoresDiego CornejoAún no hay calificaciones
- 01 Ejemplo Coordinacion Sobrecorriente Lineas de Transmision 50-51Documento11 páginas01 Ejemplo Coordinacion Sobrecorriente Lineas de Transmision 50-51Merin Alvarez100% (2)
- Escuela de Ingeniería Mecatrónica: Máquinas Eléctricas para Mecatrónica: MT-3003Documento91 páginasEscuela de Ingeniería Mecatrónica: Máquinas Eléctricas para Mecatrónica: MT-3003Diego MurilloAún no hay calificaciones
- Tr1 Tarea Automatismo 2021 20julio A AgostoDocumento21 páginasTr1 Tarea Automatismo 2021 20julio A AgostoJuan Eduardo Quichca SotoAún no hay calificaciones
- Grenergy Chile - Caracteristicas Inversor SolarDocumento22 páginasGrenergy Chile - Caracteristicas Inversor SolarAlejandro Solis GomezAún no hay calificaciones
- Modelación EQPDocumento19 páginasModelación EQPEddyAún no hay calificaciones
- Notas de Selección TP y TCDocumento4 páginasNotas de Selección TP y TCrogAún no hay calificaciones
- PDF Ajustes de Proteccion de Motor CompressDocumento42 páginasPDF Ajustes de Proteccion de Motor CompressClaudio DiazAún no hay calificaciones
- LuisDocumento17 páginasLuisCarlos Gallardo CarcamoAún no hay calificaciones
- Memoria Eléctrica de CalculoDocumento10 páginasMemoria Eléctrica de CalculoMart Zanta AnaAún no hay calificaciones
- Evaluación de Falla en Grupo Electrógeno SDMO J250 312 KVADocumento7 páginasEvaluación de Falla en Grupo Electrógeno SDMO J250 312 KVARafael EllesAún no hay calificaciones
- Corto CircuitoDocumento9 páginasCorto CircuitoChave ChabeAún no hay calificaciones
- Dimensionamiento de Servomotoreselectri PDFDocumento10 páginasDimensionamiento de Servomotoreselectri PDFMIGUEL CASTAÑEDA CHINCHAYHUARAAún no hay calificaciones
- Que Es El Método de Arranque Directo CMDocumento10 páginasQue Es El Método de Arranque Directo CMWendy LoaizaAún no hay calificaciones
- Informe Maquinas 2.2Documento5 páginasInforme Maquinas 2.2Mateo CS :vAún no hay calificaciones
- La Máquina AsíncronaDocumento7 páginasLa Máquina Asíncronayeltsinmerma123Aún no hay calificaciones
- Compendio BT FINAL PDFDocumento55 páginasCompendio BT FINAL PDFJairo MoralesAún no hay calificaciones
- Placa Caracteristica de Un Motor ElectricoDocumento4 páginasPlaca Caracteristica de Un Motor ElectricoJose Sequera DuvalAún no hay calificaciones
- Protocolo de Pruebas de Los Generadores S Ncronos 1 PDFDocumento64 páginasProtocolo de Pruebas de Los Generadores S Ncronos 1 PDFJunior YanaAún no hay calificaciones
- Practica 7Documento6 páginasPractica 7Anonymous 9rAdKL9jAún no hay calificaciones
- Motor Fase Partida 1 PDFDocumento10 páginasMotor Fase Partida 1 PDFAndres UrbanoAún no hay calificaciones
- Cálculos EléctricosDocumento3 páginasCálculos EléctricosVans8Aún no hay calificaciones
- Informe 4 Protecciones EléctricasDocumento15 páginasInforme 4 Protecciones EléctricasJosé Guerrero VAún no hay calificaciones
- Dimensionamento de Circuitos de Maquinas 2019 ReparadoDocumento23 páginasDimensionamento de Circuitos de Maquinas 2019 ReparadoJimena Encinas López0% (1)
- Términos EléctricosDocumento18 páginasTérminos EléctricosvervesolarAún no hay calificaciones
- Fusibles e InterruptoresDocumento15 páginasFusibles e InterruptoresEnder Ali Leon ValeroAún no hay calificaciones
- Pract1 LuisSantosDocumento6 páginasPract1 LuisSantosMiguel Del RosarioAún no hay calificaciones
- Anexo 06 - L1018Documento61 páginasAnexo 06 - L1018Wilber LucasAún no hay calificaciones
- RestoDocumento14 páginasRestoHernández Gordillo Juan PabloAún no hay calificaciones
- Presentación DigsilentDocumento33 páginasPresentación Digsilentsebas_rojas_230% (1)
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Servicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoDe EverandServicios complementarios en sistemas eléctricos de potencia: Análisis y modelamientoCalificación: 5 de 5 estrellas5/5 (1)
- Acabados Certificación EdgeDocumento1 páginaAcabados Certificación EdgeJuan Contreras PanizoAún no hay calificaciones
- Inbound 8313382074853908842Documento39 páginasInbound 8313382074853908842Nicolee RodriguezAún no hay calificaciones
- PVPP LuyaDocumento255 páginasPVPP LuyaAnonymous 3Fk5s0Lz4jAún no hay calificaciones
- Palaestra Latina-03Documento20 páginasPalaestra Latina-03Jose PirulliAún no hay calificaciones
- Acciones Correctivas y PreventivasDocumento48 páginasAcciones Correctivas y PreventivasBryan Henao PavaAún no hay calificaciones
- Rúbrica de Evaluación 2.2Documento1 páginaRúbrica de Evaluación 2.2carlosmtcAún no hay calificaciones
- Fuentes Del Conocimiento AdministrativoDocumento3 páginasFuentes Del Conocimiento AdministrativoAlex MartinezAún no hay calificaciones
- Acta de Reunion 05-07Documento2 páginasActa de Reunion 05-07Belen Pilar Torres SalazarAún no hay calificaciones
- Hoja Dato de Seguridad Rost ICE PDFDocumento10 páginasHoja Dato de Seguridad Rost ICE PDFIvycilla APAún no hay calificaciones
- Los Beneficios Del Rolling Forecast en Los Procesos de PresupuestaciónDocumento4 páginasLos Beneficios Del Rolling Forecast en Los Procesos de PresupuestaciónDiego Rojas Mendizábal100% (1)
- Regulacion de Tension y Velocidad en AlternadoresDocumento37 páginasRegulacion de Tension y Velocidad en AlternadoresHéctor de los Ojos Barroso100% (1)
- Práctica 3. Registro de Corrimiento y Bancos de MemoriaDocumento15 páginasPráctica 3. Registro de Corrimiento y Bancos de MemoriaJessika Nieto Alcantara50% (2)
- 6to LenguajeDocumento2 páginas6to LenguajejuanitaisidoraAún no hay calificaciones
- Proceso de Urbanizacion en LatinoamericaDocumento21 páginasProceso de Urbanizacion en LatinoamericaLUISAún no hay calificaciones
- Luxometro Digital YW-552Documento2 páginasLuxometro Digital YW-552Lucia GaldosAún no hay calificaciones
- 2015 12b Skwairsoft Es SPDocumento281 páginas2015 12b Skwairsoft Es SPWilmar CamargoAún no hay calificaciones
- T Uce 0011 Ic342 2018Documento218 páginasT Uce 0011 Ic342 2018Alexis Fabian MogollonAún no hay calificaciones
- Presentación Bloque 2Documento39 páginasPresentación Bloque 2Manu ArroyoAún no hay calificaciones
- Modelo ASSURE - ArtículoDocumento12 páginasModelo ASSURE - ArtículoHugo Armando Marcano DíazAún no hay calificaciones
- Recensión de TextosDocumento1 páginaRecensión de TextosdsabandoAún no hay calificaciones
- La Filosofía Administrativa Del Control Total de Calidad.Documento9 páginasLa Filosofía Administrativa Del Control Total de Calidad.Hugo VelazquezAún no hay calificaciones
- Criterios de Seleccion y Calculo de PlantasDocumento69 páginasCriterios de Seleccion y Calculo de PlantasEduardo EstradaAún no hay calificaciones
- Resumenes de Peliculas OnlineDocumento6 páginasResumenes de Peliculas OnlineJhony Omar Aguilar MejiaAún no hay calificaciones
- Formato Entrevistas 2020-1Documento7 páginasFormato Entrevistas 2020-1eduin wilchesAún no hay calificaciones
- Discontinuidaes y Defectos-07Documento70 páginasDiscontinuidaes y Defectos-07Carlos Antonio Jimenez MoralesAún no hay calificaciones
- Brocas ClevelandDocumento27 páginasBrocas Clevelandinthelightwork-scribdAún no hay calificaciones
- Mapa Conceptual Entrevista de PersonalDocumento1 páginaMapa Conceptual Entrevista de PersonalJorge Carrasco100% (4)