También podría gustarte
- PAGANISMODocumento10 páginasPAGANISMORywer Luna choqueAún no hay calificaciones
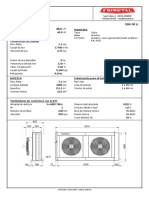
- Presupuesto-Graficos ExamenDocumento4 páginasPresupuesto-Graficos ExamenRywer Luna choqueAún no hay calificaciones
- Proyecto Letn-503 Informe Puente H C.T.D.Documento16 páginasProyecto Letn-503 Informe Puente H C.T.D.Rywer Luna choqueAún no hay calificaciones
- Importancia de Aprender LSBDocumento2 páginasImportancia de Aprender LSBRywer Luna choqueAún no hay calificaciones
- Mathcad - Ru Error T(S)Documento2 páginasMathcad - Ru Error T(S)Rywer Luna choqueAún no hay calificaciones
- Resumen LuminotecniaDocumento4 páginasResumen LuminotecniaRywer Luna choqueAún no hay calificaciones
- Actividades DidacticasDocumento2 páginasActividades DidacticasRywer Luna choqueAún no hay calificaciones
- Tablas Inst. ElectricasDocumento11 páginasTablas Inst. ElectricasRywer Luna choqueAún no hay calificaciones
- Modalidad PresencialDocumento8 páginasModalidad PresencialRywer Luna choqueAún no hay calificaciones
- Circuitos de ProbadoresDocumento3 páginasCircuitos de ProbadoresRywer Luna choqueAún no hay calificaciones
- Causas Del AutismoDocumento24 páginasCausas Del AutismoRywer Luna choqueAún no hay calificaciones
- BuenisDocumento17 páginasBuenisRywer Luna choqueAún no hay calificaciones
- Diagnostico Derechos Especial IDocumento1 páginaDiagnostico Derechos Especial IRywer Luna choqueAún no hay calificaciones
- Informe Historia Del SordoDocumento15 páginasInforme Historia Del SordoRywer Luna choqueAún no hay calificaciones
- GuionDocumento9 páginasGuionRywer Luna choqueAún no hay calificaciones
- CBS-58 Compresor de Ciclo MultipleDocumento2 páginasCBS-58 Compresor de Ciclo MultipleRywer Luna choqueAún no hay calificaciones
- LabviewDocumento4 páginasLabviewRywer Luna choqueAún no hay calificaciones
- La Educacion Especial o Educacion DiferencialDocumento5 páginasLa Educacion Especial o Educacion DiferencialRywer Luna choqueAún no hay calificaciones
- INFORMEDocumento19 páginasINFORMERywer Luna choqueAún no hay calificaciones
- El Machismo Como Principal Causa de Violencia deDocumento19 páginasEl Machismo Como Principal Causa de Violencia deRywer Luna choqueAún no hay calificaciones
- Ingenieria Mtto Cap 6Documento34 páginasIngenieria Mtto Cap 6Rywer Luna choqueAún no hay calificaciones
- UltrasonidoDocumento19 páginasUltrasonidoRywer Luna choqueAún no hay calificaciones
- GuiaEjercicios 5Documento14 páginasGuiaEjercicios 5Rywer Luna choqueAún no hay calificaciones
- UntitledDocumento2 páginasUntitledRywer Luna choqueAún no hay calificaciones
- UntitledDocumento4 páginasUntitledRywer Luna choqueAún no hay calificaciones
- S E M A N A S A N T A: Instituto Técnico Boliviano SuizoDocumento4 páginasS E M A N A S A N T A: Instituto Técnico Boliviano SuizoRywer Luna choqueAún no hay calificaciones
- Interpolador: V Sustituciones Inferior Buscado SuperiorDocumento7 páginasInterpolador: V Sustituciones Inferior Buscado SuperiorRywer Luna choqueAún no hay calificaciones
- Mar. Teorico PLCDocumento19 páginasMar. Teorico PLCRywer Luna choqueAún no hay calificaciones
- Diseño de Un Prototipo para La Deteccion de Movimientos Sismicos Basado en Un Sistema Embebido FPGADocumento60 páginasDiseño de Un Prototipo para La Deteccion de Movimientos Sismicos Basado en Un Sistema Embebido FPGARywer Luna choqueAún no hay calificaciones
- Interpolador: V Sustituciones Inferior Buscado SuperiorDocumento7 páginasInterpolador: V Sustituciones Inferior Buscado SuperiorRywer Luna choqueAún no hay calificaciones