También podría gustarte
- Mamt2 U2 Ea RaicDocumento7 páginasMamt2 U2 Ea RaicRaúl SánchezAún no hay calificaciones
- Solucionario Pc1 Ee410-NDocumento10 páginasSolucionario Pc1 Ee410-NAnderson Queque JaccyaAún no hay calificaciones
- Mamt2 U3 A2 RaicDocumento4 páginasMamt2 U3 A2 RaicRaúl SánchezAún no hay calificaciones
- Metodo de ArandelesDocumento8 páginasMetodo de Arandelessebastian minaAún no hay calificaciones
- Tarea 3 - Mètodos ComputacionalesDocumento7 páginasTarea 3 - Mètodos ComputacionaleshugoAún no hay calificaciones
- Mtse U1 A1 MastDocumento7 páginasMtse U1 A1 MastMAURICIOAún no hay calificaciones
- Resumen Teoria Mat1Documento19 páginasResumen Teoria Mat1Nerina RodriguezAún no hay calificaciones
- S1 Estructura de Grupos, Anillos y CamposDocumento5 páginasS1 Estructura de Grupos, Anillos y CamposElvis CalderonAún no hay calificaciones
- Ejercicio Maestria PDFDocumento3 páginasEjercicio Maestria PDFEnrique ManassevitzAún no hay calificaciones
- U.a.4. Calculo IiDocumento10 páginasU.a.4. Calculo IiSofia ReyesAún no hay calificaciones
- Reactores No Isotérmicos 2023Documento4 páginasReactores No Isotérmicos 2023GUTIERREZ CRUZ RODRIGO INGENIERIA QUIMICAAún no hay calificaciones
- Ejercicios de Las Secciones 3.1-4.2 Del Logan EDPDocumento25 páginasEjercicios de Las Secciones 3.1-4.2 Del Logan EDPJF HVAún no hay calificaciones
- N HipercuboDocumento3 páginasN HipercuboFelipe HLAún no hay calificaciones
- Mpro2 U2a2Documento7 páginasMpro2 U2a2Jesus Alberto GutierrezAún no hay calificaciones
- Respuesta Fraciones Parciales 1Documento8 páginasRespuesta Fraciones Parciales 1Roberto EuanAún no hay calificaciones
- Guía6Met IterativosDocumento10 páginasGuía6Met Iterativosesstefany ariasAún no hay calificaciones
- Mpes U1 Ea JeruDocumento6 páginasMpes U1 Ea JeruJesús ÚrzuloAún no hay calificaciones
- Mamt2 U3 A2 JeruDocumento7 páginasMamt2 U3 A2 JeruJesús ÚrzuloAún no hay calificaciones
- DeberDocumento5 páginasDeberPanchito Sinailin AgilaAún no hay calificaciones
- Derivadas de Las Funciones HiperbólicasDocumento4 páginasDerivadas de Las Funciones HiperbólicasAngel Zavala Soto100% (1)
- 121 Tarea2Documento23 páginas121 Tarea2yordy javier saavedra castañedaAún no hay calificaciones
- Ejercicio de Nano OpticaDocumento2 páginasEjercicio de Nano OpticaJesus PerezAún no hay calificaciones
- Examen Parcial Mate 3 16-IDocumento9 páginasExamen Parcial Mate 3 16-ICésar OchoaAún no hay calificaciones
- Mtse U1 A1 LivvDocumento8 páginasMtse U1 A1 LivvLiz VargasAún no hay calificaciones
- Solución Taller Sumativo 3 P117cuvDocumento6 páginasSolución Taller Sumativo 3 P117cuvKevin BajañaAún no hay calificaciones
- CAPITULO III Redes NeuronalesDocumento15 páginasCAPITULO III Redes NeuronalesPaulina casasola hernandezAún no hay calificaciones
- Ecuaciones DiferencialesDocumento11 páginasEcuaciones DiferencialesfernandaAún no hay calificaciones
- Ecuaciones DiferencialesDocumento12 páginasEcuaciones DiferencialesorecaAún no hay calificaciones
- Función de Transferencia para Un Sistema MecánicoDocumento5 páginasFunción de Transferencia para Un Sistema MecánicoEleana Marisol Surco QuispeAún no hay calificaciones
- TAREA14 (Final)Documento5 páginasTAREA14 (Final)Dario RuysAún no hay calificaciones
- Formulario de SimulaciónDocumento2 páginasFormulario de SimulaciónashlyduartAún no hay calificaciones
- Reporte Metodo de Euler C6-A1Documento5 páginasReporte Metodo de Euler C6-A1alejandro0% (1)
- Ejercicio 1 y 2 (C) Tatiana EscobarDocumento5 páginasEjercicio 1 y 2 (C) Tatiana EscobartatianaAún no hay calificaciones
- Anexo Proyecto EfDocumento15 páginasAnexo Proyecto EfAndres Martinez LopezAún no hay calificaciones
- Clase 3 Ecuaciones Exactas y No ExactasDocumento6 páginasClase 3 Ecuaciones Exactas y No ExactasShinya TanakaAún no hay calificaciones
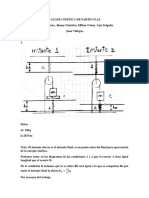
- Taller Cinética de PartículasDocumento8 páginasTaller Cinética de Partículasmilton david ochoa madridAún no hay calificaciones
- CLASE DE EJERCICIOS-No1Documento5 páginasCLASE DE EJERCICIOS-No1araña 17Aún no hay calificaciones
- TesisDocumento25 páginasTesisMikeEscutiaAún no hay calificaciones
- Algunos Problemas Resultos Sobre Física Cuántica IDocumento8 páginasAlgunos Problemas Resultos Sobre Física Cuántica IVladimirAún no hay calificaciones
- Formula de Diferencias Finitas ProgresivasDocumento12 páginasFormula de Diferencias Finitas ProgresivasAngelo FloresAún no hay calificaciones
- 05-05-2022 VARIABLES ALEATORIAS CONTINUAS Y ALGUNOS MODELOS DE PROBABILIDAD Funciones de Probabilidad Bivariantes Esperanza Bivariantes - CovarianzaDocumento6 páginas05-05-2022 VARIABLES ALEATORIAS CONTINUAS Y ALGUNOS MODELOS DE PROBABILIDAD Funciones de Probabilidad Bivariantes Esperanza Bivariantes - CovarianzaAlain RamosAún no hay calificaciones
- Mtse U2 A3 JuclDocumento6 páginasMtse U2 A3 JuclIuliouz Cueva LozanoAún no hay calificaciones
- CarbonDocumento14 páginasCarbonDaniel AleAún no hay calificaciones
- Matemáticas Andalucía 2021 - IpaoDocumento14 páginasMatemáticas Andalucía 2021 - IpaoOpositora MatemáticasAún no hay calificaciones
- ECM-desigualdad de Bessel - Identidad de ParsevalDocumento27 páginasECM-desigualdad de Bessel - Identidad de ParsevalAlejandro Delgado ChaconAún no hay calificaciones
- Sistema de Numeros ComplejosDocumento10 páginasSistema de Numeros ComplejosChristian Quispe ZapataAún no hay calificaciones
- Taller 1 CinéticaDocumento8 páginasTaller 1 CinéticaSamira JaimenAún no hay calificaciones
- Problema 3Documento23 páginasProblema 3Andrea GarciaAún no hay calificaciones
- EjerciciosDocumento20 páginasEjerciciosAndreaAún no hay calificaciones
- Analogías Sistemas Mecánicos y EléctricosDocumento2 páginasAnalogías Sistemas Mecánicos y EléctricosHHurinAún no hay calificaciones
- Mvco2 U2 Ea ElgrDocumento6 páginasMvco2 U2 Ea ElgrElizabeth GareAún no hay calificaciones
- 03 Pizarra de ClasesDocumento5 páginas03 Pizarra de ClaseslupitaAún no hay calificaciones
- Pregunta 5 - Parcial - BalotarioaDocumento3 páginasPregunta 5 - Parcial - BalotarioaSebastián Arica VidalAún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- EJERCICIOS - Castro Alfaro CristhianDocumento4 páginasEJERCICIOS - Castro Alfaro CristhianImmanuel CristianAún no hay calificaciones
- Laboratorio 9Documento1 páginaLaboratorio 9Immanuel CristianAún no hay calificaciones
- Practica An1-07Documento1 páginaPractica An1-07Immanuel CristianAún no hay calificaciones
- Práctica 4Documento14 páginasPráctica 4Immanuel CristianAún no hay calificaciones
- Lab1 An. Num PDFDocumento8 páginasLab1 An. Num PDFImmanuel CristianAún no hay calificaciones
- Laboratorio 5 ANDocumento12 páginasLaboratorio 5 ANImmanuel CristianAún no hay calificaciones
- Laboratorio 9. RDocumento9 páginasLaboratorio 9. RImmanuel CristianAún no hay calificaciones
- Lipzchitiziana - Pizarra PDFDocumento6 páginasLipzchitiziana - Pizarra PDFImmanuel CristianAún no hay calificaciones
- Tarea Grupal 2.1 ÁlgebraDocumento7 páginasTarea Grupal 2.1 ÁlgebraImmanuel CristianAún no hay calificaciones
- Trabajo de Investigación FinalDocumento16 páginasTrabajo de Investigación FinalImmanuel CristianAún no hay calificaciones
- Tarea 1-U3 PDFDocumento4 páginasTarea 1-U3 PDFImmanuel CristianAún no hay calificaciones
- Cronograma - Plan de EvaluaciónDocumento3 páginasCronograma - Plan de EvaluaciónAndres Millan MillanAún no hay calificaciones
- 2017-02 - Manual de Matemática II (1813)Documento79 páginas2017-02 - Manual de Matemática II (1813)ChaRle Zkarfer OsoresAún no hay calificaciones
- GuiaDocente - MATEMATICAS APLICADAS AL MARKETINGDocumento11 páginasGuiaDocente - MATEMATICAS APLICADAS AL MARKETINGAcademias Saber MásAún no hay calificaciones
- Operaciones Con MatricesDocumento4 páginasOperaciones Con MatricesJoel AstudilloAún no hay calificaciones
- Actualizado Didactica 3.2Documento17 páginasActualizado Didactica 3.2Aracelis Beras mejiaAún no hay calificaciones
- Deber 3.0 - Diaz Andres - Metodo de TriangulosDocumento11 páginasDeber 3.0 - Diaz Andres - Metodo de TriangulosCristal TorresAún no hay calificaciones
- Determinantes: 2.1) Definición de DeterminantesDocumento15 páginasDeterminantes: 2.1) Definición de DeterminantesYasmin CRAún no hay calificaciones
- 46-59 CorregidoDocumento14 páginas46-59 CorregidoantonbaronAún no hay calificaciones
- DETERMINANTEDocumento5 páginasDETERMINANTEGabriel mamani FernandezAún no hay calificaciones
- Sistema Directo de Suministro de Agua (Instalaciones en Edificaciones Ii) PDFDocumento18 páginasSistema Directo de Suministro de Agua (Instalaciones en Edificaciones Ii) PDFAlexander Asuncion Chiclote RupayAún no hay calificaciones
- Representacion MatricialDocumento3 páginasRepresentacion MatricialERNESTO OCHOAAún no hay calificaciones
- Ejercicios Resueltos GrafosDocumento28 páginasEjercicios Resueltos GrafosJorge MarcilloAún no hay calificaciones
- F BS2 03 SistemasDocumento19 páginasF BS2 03 SistemasAdriánAún no hay calificaciones
- Sesión 3.3 MatricesDocumento9 páginasSesión 3.3 MatricesDiana IdrugoAún no hay calificaciones
- Autoevaluación N°1 - Revisión de IntentosDocumento7 páginasAutoevaluación N°1 - Revisión de IntentosAlex XAún no hay calificaciones
- Fundamentos Básicos de Matemática Aplicados A La Economía PDFDocumento257 páginasFundamentos Básicos de Matemática Aplicados A La Economía PDFMagaly JiménezAún no hay calificaciones
- Silabo de Algebra LinealDocumento5 páginasSilabo de Algebra LinealJorge YupanquiAún no hay calificaciones
- Apuntes 2-01Documento157 páginasApuntes 2-01David Paz100% (2)
- Introducción Al Control MultivariableDocumento14 páginasIntroducción Al Control MultivariableDavid Alexander0% (1)
- Regla de CramerDocumento2 páginasRegla de CramerNATHALY KARINA CARABAJO ESCANDONAún no hay calificaciones
- Silabo Matematica Básica 2020i-Ingenieria CivilDocumento9 páginasSilabo Matematica Básica 2020i-Ingenieria CivilPEDRO CESAR ESPINOZA RONDOYAún no hay calificaciones
- Diagrama MatricialDocumento31 páginasDiagrama MatricialJESUS ELIAS HERNANDEZ FLORESAún no hay calificaciones
- Robot 2Documento91 páginasRobot 2Anonymous ykkmeDAún no hay calificaciones
- Parcial Final Completo AlgebraDocumento53 páginasParcial Final Completo AlgebraAndrew BeltrandAún no hay calificaciones
- AEdM EA4 Jose - GarciaDocumento8 páginasAEdM EA4 Jose - GarciaAntonio AnguianoAún no hay calificaciones
- Lopez Mesa Planeamiento RansaDocumento165 páginasLopez Mesa Planeamiento RansaErnesto Rivera SalasAún no hay calificaciones
- Práctica 1Documento4 páginasPráctica 1angel muñozAún no hay calificaciones
- Métodos Scamper - Relaciones Forzadas - Conexiones Morfológicas ForzadasDocumento11 páginasMétodos Scamper - Relaciones Forzadas - Conexiones Morfológicas ForzadasNory Solorio Nava100% (1)
- Crono Geo VectorialDocumento7 páginasCrono Geo VectorialNorberto TabarezAún no hay calificaciones