También podría gustarte
- Memorias y Mas MemoriasDocumento16 páginasMemorias y Mas MemoriasFelizde LaVidaAún no hay calificaciones
- Arquitectura ComputadoresDocumento19 páginasArquitectura ComputadoresJohnBHAún no hay calificaciones
- Estructura Y Funciones BásicasDocumento31 páginasEstructura Y Funciones BásicasJonnatan ariasAún no hay calificaciones
- TEMA 04 PES 2023 - Memoria Interna. Tipos. Direccionamiento. Características y FuncionesDocumento17 páginasTEMA 04 PES 2023 - Memoria Interna. Tipos. Direccionamiento. Características y Funcionesleandro.lopezAún no hay calificaciones
- Cap 1 - 4 Arquitectura de Memoria PDFDocumento20 páginasCap 1 - 4 Arquitectura de Memoria PDFsuscripcionesAún no hay calificaciones
- Actividad 1.3 Introducción A Los Sistemas Informáticos-2Documento22 páginasActividad 1.3 Introducción A Los Sistemas Informáticos-2Ana Jorge GarridoAún no hay calificaciones
- Memoria - Arquitectura de ComputadorasDocumento24 páginasMemoria - Arquitectura de ComputadorasManu Hrt100% (1)
- Almacenamiento PrimarioDocumento3 páginasAlmacenamiento PrimarioYohanna LisnichukAún no hay calificaciones
- Clase IDocumento20 páginasClase IMary CerticaAún no hay calificaciones
- Capitulo IV - MemoriasDocumento53 páginasCapitulo IV - MemoriasArtemio HlAún no hay calificaciones
- Memorias RamDocumento27 páginasMemorias Ramfredsantiago05Aún no hay calificaciones
- Memorias RamDocumento19 páginasMemorias RamYhovan TabordaAún no hay calificaciones
- Arquitectura ExposicionDocumento59 páginasArquitectura Exposicionkevin quizaAún no hay calificaciones
- Tema3 MemoriaRAM PDFDocumento13 páginasTema3 MemoriaRAM PDFAlberto VelazquezAún no hay calificaciones
- Unidad II MemoriasDocumento11 páginasUnidad II MemoriasRicardo CorreaAún no hay calificaciones
- Unidad3 - HardwareDocumento63 páginasUnidad3 - Hardwarejuanpxndx92Aún no hay calificaciones
- Manual de Hasta 3Documento59 páginasManual de Hasta 3Zoilo juan nkogo bayemeAún no hay calificaciones
- ARQ. CompDocumento32 páginasARQ. CompZoilo juan nkogo bayemeAún no hay calificaciones
- Manual de Clases Arq. ComputacionalDocumento46 páginasManual de Clases Arq. ComputacionalZoilo juan nkogo bayemeAún no hay calificaciones
- Tema2 Memorias P1Documento95 páginasTema2 Memorias P1Lizbeth TitoAún no hay calificaciones
- Manten - Equipos - Computo - 3 - Chipset - Memorias RAM - ROMDocumento64 páginasManten - Equipos - Computo - 3 - Chipset - Memorias RAM - ROMMATIAS PILCO MANDORTUPAAún no hay calificaciones
- Tema 1.memoria 2021-22Documento88 páginasTema 1.memoria 2021-22Josears 20Aún no hay calificaciones
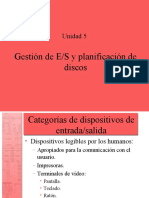
- CAP 11 Gestión de ES y Planificación de Discos PDFDocumento64 páginasCAP 11 Gestión de ES y Planificación de Discos PDFHanibbal LecterAún no hay calificaciones
- Clase 16-12Documento28 páginasClase 16-12llopisfbarrioAún no hay calificaciones
- Arquitectura Del Computador-2020-1Documento14 páginasArquitectura Del Computador-2020-1Miguel AngelAún no hay calificaciones
- Funcionamiento Del CPU y MemoriaDocumento5 páginasFuncionamiento Del CPU y MemoriaEsqueda Martinez AdrianAún no hay calificaciones
- Sistemas de ComputaciónDocumento1 páginaSistemas de ComputaciónJesus Francisco Hernandez CarlosAún no hay calificaciones
- Interconexión Procesador-MemoroiaDocumento9 páginasInterconexión Procesador-MemoroiaKevin Joel Quiza CalloquispeAún no hay calificaciones
- Tema 2Documento44 páginasTema 2lilaxparkAún no hay calificaciones
- Cpu 2018 1Documento78 páginasCpu 2018 1ARIASAún no hay calificaciones
- 11Documento4 páginas11Jose QAún no hay calificaciones
- GuiaClasesEstudio 1.3 Microcontrolador Fundamentos AplicacionesDocumento47 páginasGuiaClasesEstudio 1.3 Microcontrolador Fundamentos AplicacionesSound AplicacionAún no hay calificaciones
- CPU DécimoDocumento17 páginasCPU DécimoSaúl Eduardo Choéz TapiaAún no hay calificaciones
- UNIDAD3 - HardwareDocumento60 páginasUNIDAD3 - HardwareGabriel HerreraAún no hay calificaciones
- 09-Dispositivos de MemoriaDocumento34 páginas09-Dispositivos de MemoriaLuis Gutiérrez MagánAún no hay calificaciones
- Arquitectura de Computadoras - SODocumento21 páginasArquitectura de Computadoras - SOvalottoana24Aún no hay calificaciones
- MemoriaDocumento29 páginasMemoriaCarlos UlateAún no hay calificaciones
- IntroduccionDocumento19 páginasIntroduccionAlberto AqAún no hay calificaciones
- Acceso Directo A MemoriaDocumento21 páginasAcceso Directo A MemoriaJosé ManuelAún no hay calificaciones
- Unidad 1 Actividad ADocumento3 páginasUnidad 1 Actividad AKarina M Vergara CastañedaAún no hay calificaciones
- Unidad3 v9Documento27 páginasUnidad3 v9AlvaroAún no hay calificaciones
- Arquitectura Von Neumann PDFDocumento30 páginasArquitectura Von Neumann PDFFernando Morante PeregrinaAún no hay calificaciones
- MAQ Components 2Documento4 páginasMAQ Components 2jicari2885Aún no hay calificaciones
- Tema 6 - Memoria Caché PDFDocumento48 páginasTema 6 - Memoria Caché PDFNataliaChacua100% (1)
- Tarea Virtual 2 - Javier AguirreDocumento8 páginasTarea Virtual 2 - Javier AguirreJavier RivadeneiraAún no hay calificaciones
- 2 Memoria Ram Rom1Documento16 páginas2 Memoria Ram Rom1j_carlostAún no hay calificaciones
- Tema 3 - Memoria PrincipalDocumento32 páginasTema 3 - Memoria PrincipalMiguel LopézAún no hay calificaciones
- Tipos de Memoria RAM Estáticas - SRAMDocumento3 páginasTipos de Memoria RAM Estáticas - SRAMVictor Ramón Noblejas MartínezAún no hay calificaciones
- Memoria InternaDocumento3 páginasMemoria Internapatty ayalaAún no hay calificaciones
- Memorias: SegmentaciónDocumento59 páginasMemorias: SegmentaciónLautaro OlivastriAún no hay calificaciones
- CPU y Sus ComponentesDocumento18 páginasCPU y Sus ComponentesGabriel Malpu TaquezAún no hay calificaciones
- UNIDAD 1 Clase 02 Modelo de VNDocumento63 páginasUNIDAD 1 Clase 02 Modelo de VNDaniel JimenezAún no hay calificaciones
- DiapositivasDocumento65 páginasDiapositivasRicardo Mosquera CanteroAún no hay calificaciones
- Unidad IDocumento90 páginasUnidad IPaola Juliethe BurgosAún no hay calificaciones
- Administración de MemoriaDocumento20 páginasAdministración de MemoriaDavid Ribera BlancoAún no hay calificaciones
- Memorias RAMDocumento8 páginasMemorias RAMJonathan GaonaAún no hay calificaciones
- Arquitectura Von Neumann y Arquitectura HarvardDocumento2 páginasArquitectura Von Neumann y Arquitectura HarvardEDWIN ALEJANDRO CASTRO MOLINAAún no hay calificaciones
- Memoria Principal PDFDocumento3 páginasMemoria Principal PDFEdgar PeredaAún no hay calificaciones
- Microprocesadores Clase 2Documento20 páginasMicroprocesadores Clase 2Wellington BasilioAún no hay calificaciones
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- Ejercicios Apuntes Introducción A La InformáticaDocumento3 páginasEjercicios Apuntes Introducción A La InformáticapatriciaprietoAún no hay calificaciones
- Almacenamiento InformaticoDocumento25 páginasAlmacenamiento InformaticoErick Anthony RamirezAún no hay calificaciones
- Separata de WindowsDocumento19 páginasSeparata de WindowsAlan JuárezAún no hay calificaciones
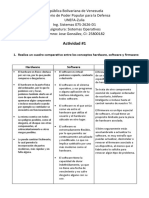
- Actividad #1 Jose Gonzalez 07S-2626-D1Documento3 páginasActividad #1 Jose Gonzalez 07S-2626-D1jose gonzalezAún no hay calificaciones
- Qué Es WindowsDocumento12 páginasQué Es WindowsLisbeth Alvarado MeraAún no hay calificaciones
- Inf 1fas1Documento62 páginasInf 1fas1Sergio Esteban Zaragoza ArmentaAún no hay calificaciones
- XV-5080 FQ SPDocumento0 páginasXV-5080 FQ SPalbermusikariaAún no hay calificaciones
- Dispositivos de Almacenamiento SecundarioDocumento13 páginasDispositivos de Almacenamiento Secundarioyiscar murilloAún no hay calificaciones
- Actividad 2Documento9 páginasActividad 2lililianaAún no hay calificaciones
- Base de Datos Basicos Ga4-Ata5-Evo1Documento6 páginasBase de Datos Basicos Ga4-Ata5-Evo1Margarita BelenoAún no hay calificaciones
- Análisis Forense en Sistemas Informáticos: Luis Villalta MárquezDocumento13 páginasAnálisis Forense en Sistemas Informáticos: Luis Villalta Márquezmateito777100% (1)
- Mantenimiento Preventivo Y Correctivo C-SG-03PDocumento8 páginasMantenimiento Preventivo Y Correctivo C-SG-03PXimena PachecoAún no hay calificaciones
- El Procesamiento de La Informacion en Los Procesos de ProduccionDocumento10 páginasEl Procesamiento de La Informacion en Los Procesos de ProduccionANAHEL ACOSTA OSUNAAún no hay calificaciones
- Hoja de Servicio PC y PortatilesDocumento4 páginasHoja de Servicio PC y PortatilesXaulinho Posadas100% (1)
- Componentes Internos DelDocumento21 páginasComponentes Internos DelMaritza OrtizAún no hay calificaciones
- Disco Duro y SSDDocumento28 páginasDisco Duro y SSDManuel MaciasAún no hay calificaciones
- ExamenDocumento12 páginasExamengonzaloAún no hay calificaciones
- Gabriela Montenegro Arquitectura Del ComputadorDocumento6 páginasGabriela Montenegro Arquitectura Del ComputadorGabriela MontenegroAún no hay calificaciones
- Taller SenaDocumento7 páginasTaller SenaSoniaLeonVanegas83% (6)
- Cuestionario de TecnologiaDocumento7 páginasCuestionario de TecnologiaCelineth Patricia Santamaria ConcepcionAún no hay calificaciones
- Manualdeusuario Smart TveNova 50FUDocumento22 páginasManualdeusuario Smart TveNova 50FUgisele caceresAún no hay calificaciones
- Nokia Flasher SpanishDocumento7 páginasNokia Flasher SpanishRoberto HernandezAún no hay calificaciones
- Evolucion de La Infraestructura TI PDFDocumento8 páginasEvolucion de La Infraestructura TI PDFYeimy Ardila SantiagoAún no hay calificaciones
- Practicas para El Uso de La ComputadoraDocumento3 páginasPracticas para El Uso de La ComputadoraVega_Andrea_304100% (1)
- Adquisición de Evidencias y Cadena de Custodia - Jhony - MartínezDocumento14 páginasAdquisición de Evidencias y Cadena de Custodia - Jhony - MartínezJHONY ALEXIS MARTINEZ GARCIA100% (1)
- INformatica 5to GradoDocumento9 páginasINformatica 5to GradoSamanthaAún no hay calificaciones
- Dispositivos de AlmacenamientoDocumento10 páginasDispositivos de AlmacenamientoNeyver AlvisAún no hay calificaciones
- Clase 13 - Manejo de AutofiltrosDocumento50 páginasClase 13 - Manejo de Autofiltrosyeisson garnicaAún no hay calificaciones
- Introduccion A La ComputacionDocumento19 páginasIntroduccion A La ComputacionIsabella Cajo LalupúAún no hay calificaciones
- Infografia - Sebastian HenaoDocumento3 páginasInfografia - Sebastian HenaoFILLBASAún no hay calificaciones