También podría gustarte
- UF1962 - Ensamblado de componentes de equipos eléctricos y electrónicosDe EverandUF1962 - Ensamblado de componentes de equipos eléctricos y electrónicosAún no hay calificaciones
- CNC Router 3018PRO User Manual EspañolDocumento52 páginasCNC Router 3018PRO User Manual EspañolAlessandro Villegas88% (26)
- GC 275 SprinterDocumento21 páginasGC 275 SprinterTomas CastellanoAún no hay calificaciones
- C AdvanceDocumento24 páginasC AdvanceParaClavesAún no hay calificaciones
- Fitage GE 202Documento20 páginasFitage GE 202Etienne SavatAún no hay calificaciones
- E385 E3zm-B Series Datasheet EsDocumento12 páginasE385 E3zm-B Series Datasheet EsEdu JF SánchezAún no hay calificaciones
- Ahi Ta P Care TaperDocumento6 páginasAhi Ta P Care TaperSofia Mucha AvilesAún no hay calificaciones
- Manual Bici OlmoDocumento18 páginasManual Bici OlmoJuan Manuel BurdetAún no hay calificaciones
- OMRON 2023 CompressedDocumento91 páginasOMRON 2023 CompressedOziel Medina AlvaradoAún no hay calificaciones
- M08018 704 Herramientas Especiales SM 930E-4Documento6 páginasM08018 704 Herramientas Especiales SM 930E-4Emmanuel Torres HerreraAún no hay calificaciones
- Manual Kit New Rotor Pro Esp PT enDocumento73 páginasManual Kit New Rotor Pro Esp PT enMauro CastroAún no hay calificaciones
- Instalación SNCDocumento2 páginasInstalación SNCPascual M sAún no hay calificaciones
- Arg 873SP PDFDocumento15 páginasArg 873SP PDFNicoleAún no hay calificaciones
- Phoenix Contact 3044128 EsDocumento50 páginasPhoenix Contact 3044128 EsMarcoAún no hay calificaciones
- Motores Trilladora de MaizDocumento12 páginasMotores Trilladora de MaizMartin AdasmeAún no hay calificaciones
- Ejc Egv g13 Rev00Documento50 páginasEjc Egv g13 Rev00Lucas TavaresAún no hay calificaciones
- 173-DIY 4-DOF Robot Kit User Manual-EspañolDocumento32 páginas173-DIY 4-DOF Robot Kit User Manual-EspañolD4NI3LAún no hay calificaciones
- Phoenix Contact 3044102 EsDocumento55 páginasPhoenix Contact 3044102 EsMarcoAún no hay calificaciones
- Propal GeneradorDocumento58 páginasPropal GeneradorGustavo Adolfo Anticona AraujoAún no hay calificaciones
- Electr. Edificio NUEVODocumento29 páginasElectr. Edificio NUEVORICARDO QBAún no hay calificaciones
- 4 Sumo Blue MANUAL DE ENSAMBLE Sumo BluetoothDocumento14 páginas4 Sumo Blue MANUAL DE ENSAMBLE Sumo BluetoothAlexander UstaresAún no hay calificaciones
- Instrucciones Brazo Robotico Con BluetoothDocumento18 páginasInstrucciones Brazo Robotico Con BluetoothBruce John Torres Gutierrez100% (1)
- Arg 2535Documento14 páginasArg 2535Marcelo ManueliAún no hay calificaciones
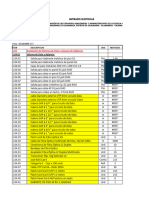
- Inventario Stock de RepuestosDocumento2 páginasInventario Stock de RepuestosluquinyAún no hay calificaciones
- Wikifab-Montaje de P3steel Por HTA3D - Tutorial 1 - Estructura y Eje YDocumento18 páginasWikifab-Montaje de P3steel Por HTA3D - Tutorial 1 - Estructura y Eje YBryant KnightAún no hay calificaciones
- Cubicacion de MaterialesDocumento3 páginasCubicacion de MaterialesDaniel ManriquezAún no hay calificaciones
- Programas de Produccion Comasa Abril 2019Documento8 páginasProgramas de Produccion Comasa Abril 2019Luis Poma TiahualpaAún no hay calificaciones
- XV250Documento2 páginasXV250AdolfoAún no hay calificaciones
- Kit de Robotica GemabecDocumento11 páginasKit de Robotica Gemabecluis100% (1)
- Manual BLTDocumento32 páginasManual BLTCarlos Andres Neira AgudeloAún no hay calificaciones
- Cambio de Rodamientos de Bomba CentrifugaDocumento5 páginasCambio de Rodamientos de Bomba CentrifugaErickGonzalezFrancoAún no hay calificaciones
- XT225 600Documento2 páginasXT225 600Jose SantiagoAún no hay calificaciones
- User Manual MTDP 9500BDocumento12 páginasUser Manual MTDP 9500BSaul PerezAún no hay calificaciones
- Catalogo de Pecas Rdde03020lDocumento19 páginasCatalogo de Pecas Rdde03020lFabioAún no hay calificaciones
- E94E-ES-01 E3F1 DatasheetDocumento8 páginasE94E-ES-01 E3F1 Datasheetpayaso1234Aún no hay calificaciones
- DM MBSL002 02 SpaDocumento27 páginasDM MBSL002 02 SpaJcm Taller De Inyeccion ElectronicaAún no hay calificaciones
- Aoyue Int2703A+ SpanishDocumento32 páginasAoyue Int2703A+ SpanishVenera Segunda ManoAún no hay calificaciones
- Manual Troqueles Mini Die EspañolDocumento34 páginasManual Troqueles Mini Die EspañolHugo SanchezAún no hay calificaciones
- Alternador, Encendido (Para EE. UU. y Canadá) - ST518350: Lista de PiezasDocumento3 páginasAlternador, Encendido (Para EE. UU. y Canadá) - ST518350: Lista de PiezasVladimirCarrilloAún no hay calificaciones
- Catalogo de Partes Rdu07021aDocumento38 páginasCatalogo de Partes Rdu07021aOSCAR REYESAún no hay calificaciones
- Manual 2V78F-2Documento27 páginasManual 2V78F-2Fernando IdarragaAún no hay calificaciones
- Manual de ensamble-CNC3018PRO-MAXDocumento14 páginasManual de ensamble-CNC3018PRO-MAXSantos MalcaAún no hay calificaciones
- CS-33F - Conductor Concentrico de Aluminio 3x # 1-0 AWGDocumento2 páginasCS-33F - Conductor Concentrico de Aluminio 3x # 1-0 AWGwester_bisAún no hay calificaciones
- Ro1 Listado Materiales Importadora KanagawaDocumento1 páginaRo1 Listado Materiales Importadora KanagawaAngélica Familia OPSAún no hay calificaciones
- Extracción de Pernos Rotos-1Documento3 páginasExtracción de Pernos Rotos-1Johan MochicaAún no hay calificaciones
- Diagrama Escalera para El Programado en El PLC Allen BradleyDocumento12 páginasDiagrama Escalera para El Programado en El PLC Allen BradleyBruce Law0% (1)
- Manual CNC3018PRO-PRO MAX Bluetooth-2Documento17 páginasManual CNC3018PRO-PRO MAX Bluetooth-2Leventen Aldave RamirezAún no hay calificaciones
- EXTRACCIÓN DE PERNOS ROTOS Hinojosa Jordy PDFDocumento4 páginasEXTRACCIÓN DE PERNOS ROTOS Hinojosa Jordy PDFJhon Alex Hinojosa FloresAún no hay calificaciones
- Codensa LA322Documento4 páginasCodensa LA322Silvana RamirezAún no hay calificaciones
- CatálogoDocumento22 páginasCatálogoOrlando MartínAún no hay calificaciones
- Herramientas Realizacion TCT BT Nma0126Documento14 páginasHerramientas Realizacion TCT BT Nma0126Fabricio Silva YurramendiAún no hay calificaciones
- Manual Kit Seguidor de Liena Con Resistencias Dip Mecatronica Espa - OlDocumento6 páginasManual Kit Seguidor de Liena Con Resistencias Dip Mecatronica Espa - OlAlfonso Antonio Hernandez CervantesAún no hay calificaciones
- Cerradura Manija P/Recámara Cromo Mate, Cilindro de Latón: CaracterísticasDocumento2 páginasCerradura Manija P/Recámara Cromo Mate, Cilindro de Latón: Característicasedison saul vargas mejiaAún no hay calificaciones
- Temporizador para Soldador de Baterías 18650Documento4 páginasTemporizador para Soldador de Baterías 18650Pablo BocanegraAún no hay calificaciones
- As-Bl1 B PDFDocumento2 páginasAs-Bl1 B PDFGretty CasasAún no hay calificaciones
- Motor Electrico de PulsosDocumento2 páginasMotor Electrico de PulsosViankaLafuenteAún no hay calificaciones
- Presupuesto Propuesta Filamento 1Documento3 páginasPresupuesto Propuesta Filamento 1Mateo vidalAún no hay calificaciones
- LA314 Red Abierta Existente - Circuito Secundario Con Extension para Percha Porta AisladorDocumento3 páginasLA314 Red Abierta Existente - Circuito Secundario Con Extension para Percha Porta AisladorYhoze Pache'sAún no hay calificaciones
- JVC Arsenal Subwoofer CS-AW6240Documento7 páginasJVC Arsenal Subwoofer CS-AW6240Manuel BarnettAún no hay calificaciones
- Manual Del Usuario T350 VFDocumento27 páginasManual Del Usuario T350 VFOrsted InmortusAún no hay calificaciones
- Medio Social y Natural, Primero PrimariaDocumento14 páginasMedio Social y Natural, Primero PrimariaGabby Funes de SchawAún no hay calificaciones
- Tubo Conduit de PolietilenoDocumento5 páginasTubo Conduit de PolietilenoMarco JordánAún no hay calificaciones
- PYA ES 94 RR 0052 RV BDocumento14 páginasPYA ES 94 RR 0052 RV BSergio Ibáñez MonaresAún no hay calificaciones
- Taller Entregable 8 de Mayo 2020Documento3 páginasTaller Entregable 8 de Mayo 2020Laura Catalina Cuetia OrtizAún no hay calificaciones
- Taller 1Documento3 páginasTaller 1Jairo GrefAún no hay calificaciones
- Declinaciones LatinasDocumento14 páginasDeclinaciones LatinasBrian TeranAún no hay calificaciones
- Asis Sinincay PDFDocumento45 páginasAsis Sinincay PDFEugenia RoaAún no hay calificaciones
- Libro HermanoDocumento18 páginasLibro Hermanomery AAún no hay calificaciones
- Autoestima y Sistema FamiliarDocumento6 páginasAutoestima y Sistema FamiliarMaría Alejandra PuelloAún no hay calificaciones
- Alejo Carpentier en La Música en CubaDocumento1 páginaAlejo Carpentier en La Música en CubaDaniel BonillaAún no hay calificaciones
- GPM-P5 para ProyectosDocumento38 páginasGPM-P5 para ProyectosErika Martinez100% (1)
- Actividad 3. Cuadro ComparativoDocumento7 páginasActividad 3. Cuadro ComparativoCristian EstrellaAún no hay calificaciones
- Guía 3 1°ccssDocumento3 páginasGuía 3 1°ccssMelinaBasilioSantosAún no hay calificaciones
- Lectura CríticaDocumento4 páginasLectura CríticaEdison EscobarAún no hay calificaciones
- Analisis Cuantitativo Con RDocumento60 páginasAnalisis Cuantitativo Con Ranonimo anonimoAún no hay calificaciones
- Practica 4. Temperatura y CalorDocumento6 páginasPractica 4. Temperatura y CalorYerson Cordoba Cuesta0% (1)
- Cuento El Gigante EgoístaDocumento2 páginasCuento El Gigante EgoístaMarcela Teresa Peña LeónAún no hay calificaciones
- La Planeación DidácticaDocumento4 páginasLa Planeación Didácticanelson guzmanAún no hay calificaciones
- ARCarrillo - Actividad2 Semana6Documento4 páginasARCarrillo - Actividad2 Semana6Andrea ContrerasAún no hay calificaciones
- Logica ProposicionalDocumento2 páginasLogica ProposicionalCarlos Daniel QUISPE CARHUATOCTO100% (1)
- Mètodo Del Instituto Del Asfalto ExposicionDocumento27 páginasMètodo Del Instituto Del Asfalto ExposicionJose Luis Vega MamaniAún no hay calificaciones
- Lesión Del Manguito RotadorDocumento7 páginasLesión Del Manguito RotadorCarmen F. LanzaAún no hay calificaciones
- Caso Practico Unidad 1Documento6 páginasCaso Practico Unidad 1Yicel Morelo poloAún no hay calificaciones
- Estructura de Las Rocas SedimentariasDocumento28 páginasEstructura de Las Rocas SedimentariasDany Jhonatan Terrones MendozaAún no hay calificaciones
- Tai DDHH 4to Semestre Libertad de ExpresionDocumento15 páginasTai DDHH 4to Semestre Libertad de Expresionjose antonio baca quispeAún no hay calificaciones
- La Patraña Calentóloga y Climática Más Grande de La Historia by Colin RivasDocumento177 páginasLa Patraña Calentóloga y Climática Más Grande de La Historia by Colin RivasTIBURÓN ATACAAún no hay calificaciones
- Sintesis PaladiniDocumento1 páginaSintesis PaladiniIrma RicoAún no hay calificaciones
- Infografia de Proceso Ilustrada Llamativa Retro Azul RosaDocumento1 páginaInfografia de Proceso Ilustrada Llamativa Retro Azul RosaAdriana SagahonAún no hay calificaciones
- Lab. Fisica 2Documento11 páginasLab. Fisica 2WILMAN AULLA CARDENASAún no hay calificaciones
- Paredes RMDocumento62 páginasParedes RMingrid perezAún no hay calificaciones