También podría gustarte
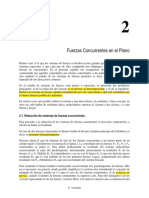
- Estabilidad - Capitulo 2 - Fuerzas ConcurentesDocumento14 páginasEstabilidad - Capitulo 2 - Fuerzas ConcurentesAgustin VillalbaAún no hay calificaciones
- Estabilidad - Capitulo 4 - Fuerzas ParalelasDocumento12 páginasEstabilidad - Capitulo 4 - Fuerzas ParalelasAgustin VillalbaAún no hay calificaciones
- 4 Anal Din SDFDocumento3 páginas4 Anal Din SDFManuel Giron OrtizAún no hay calificaciones
- Practica 3. Tipos de Funciones y Determinacion de Relacion Entre VariablesDocumento10 páginasPractica 3. Tipos de Funciones y Determinacion de Relacion Entre Variablesyijemi3879Aún no hay calificaciones
- Reacciones Quimicas y La Vida CotidianaDocumento26 páginasReacciones Quimicas y La Vida Cotidianabiocarmelianas89% (19)
- FUNDAMENTOS ElectricidadDocumento9 páginasFUNDAMENTOS ElectricidadHolaSoyJuanAún no hay calificaciones
- Practica 1 Circuitos ElectricosDocumento10 páginasPractica 1 Circuitos ElectricosAdolfo Saul Elisalde NaranjoAún no hay calificaciones
- Diagrama de Pareto CoquiDocumento2 páginasDiagrama de Pareto CoquiHARDY EDDISONAún no hay calificaciones
- Anónimo - Pica Pica (TAB)Documento1 páginaAnónimo - Pica Pica (TAB)jhonder rojasAún no hay calificaciones
- Estudio de La Linea RectaDocumento13 páginasEstudio de La Linea RectaHans Billy Portella CarlosAún no hay calificaciones
- Diagrama StreckeisenDocumento1 páginaDiagrama StreckeisenAlejandro Castro IzquierdoAún no hay calificaciones
- A Teorico CorrelacionDocumento7 páginasA Teorico CorrelacionValeria BelmonteAún no hay calificaciones
- Momento Respecto A Un Punto PDFDocumento6 páginasMomento Respecto A Un Punto PDFmartha francoAún no hay calificaciones
- Distorsión ArmónicaDocumento18 páginasDistorsión ArmónicaFrank ChacAún no hay calificaciones
- Diagramas TernariosDocumento6 páginasDiagramas Ternariosmpa321Aún no hay calificaciones
- Tarea Semana 4Documento3 páginasTarea Semana 4yasAún no hay calificaciones
- La EstaticaDocumento19 páginasLa EstaticaManuel CueltanAún no hay calificaciones
- Ecuaciones ParamétricasDocumento13 páginasEcuaciones ParamétricasGabriel Gutierrez50% (4)
- Libro 10Documento2 páginasLibro 10yomayra del rocio espinoza criolloAún no hay calificaciones
- Informe EjecutivoDocumento12 páginasInforme EjecutivoDiana Carolina BecerraAún no hay calificaciones
- Cinematica InversaDocumento10 páginasCinematica Inversajjc7619643Aún no hay calificaciones
- AM3 Murmis TP2 - Ej. 37 PDFDocumento4 páginasAM3 Murmis TP2 - Ej. 37 PDFusersmallAún no hay calificaciones
- Clase 3, UL ContributoriaDocumento9 páginasClase 3, UL ContributoriaEmanuel Rodríguez SolerAún no hay calificaciones
- Cap 7a - Flujo Laminar en Placas PlanasDocumento19 páginasCap 7a - Flujo Laminar en Placas Planasluis30lazaroAún no hay calificaciones
- Algunas Consideraciones Sobre La SimetríaDocumento7 páginasAlgunas Consideraciones Sobre La SimetríaFederico MartinAún no hay calificaciones
- Funciones CircularesDocumento18 páginasFunciones CircularesnataliAún no hay calificaciones
- Regresión LinealDocumento23 páginasRegresión LinealQuironXAún no hay calificaciones
- 02-Treinta y Dos SenderosDocumento8 páginas02-Treinta y Dos Senderosaw.marquez5057Aún no hay calificaciones
- Carta Psicometrica (Sistema Ingles)Documento1 páginaCarta Psicometrica (Sistema Ingles)ZimAún no hay calificaciones
- 04 Regla Tanto Por CientoDocumento10 páginas04 Regla Tanto Por CientoIke_CollpaAún no hay calificaciones
- Calculo de CortocircuitoDocumento22 páginasCalculo de CortocircuitofranklingonzAún no hay calificaciones
- 3 - Lamina Gráficos EstadísticosDocumento1 página3 - Lamina Gráficos EstadísticosNeisser Arturo Soto FernándezAún no hay calificaciones
- Tratamiento de datos Fase 1: V1= 25 (V) // V2=20 (V) R1 = 100 (Ω) R2 = 330 (Ω) I (mA) V (V)Documento7 páginasTratamiento de datos Fase 1: V1= 25 (V) // V2=20 (V) R1 = 100 (Ω) R2 = 330 (Ω) I (mA) V (V)Kevin RiosAún no hay calificaciones
- Datos Práctica 11Documento10 páginasDatos Práctica 11kathiana MaruriAún no hay calificaciones
- Balance de MasaDocumento10 páginasBalance de MasaAlvaro GonzalezAún no hay calificaciones
- Chart TitleDocumento2 páginasChart Titleadolfo espinalAún no hay calificaciones
- Vectores en El PlanoDocumento20 páginasVectores en El PlanoOmar GarciaAún no hay calificaciones
- Rel MatDocumento33 páginasRel MatvmedinaceliAún no hay calificaciones
- PorcentajesDocumento3 páginasPorcentajesRobin OmarAún no hay calificaciones
- TC3 Notas 2Documento9 páginasTC3 Notas 2José Carlos DesalesAún no hay calificaciones
- CorrelacionDocumento12 páginasCorrelacionCruz Sanchez ObedAún no hay calificaciones
- Capitulo 2 - Rectas y Planos en El EspacioDocumento7 páginasCapitulo 2 - Rectas y Planos en El EspacioJuan FernandezAún no hay calificaciones
- Apuntes MAQUINAS SINCRONADocumento10 páginasApuntes MAQUINAS SINCRONAFernando Huentecura TapiaAún no hay calificaciones
- U1 Regresion Actual PDFDocumento39 páginasU1 Regresion Actual PDFGabriel ManriquezAún no hay calificaciones
- Libro Razonamiento Matematico Operadores Matematicos Torres Lozano 2010 IIDocumento15 páginasLibro Razonamiento Matematico Operadores Matematicos Torres Lozano 2010 IIDarwin Nestor Arapa Quispe100% (2)
- Diagrama de ParetoDocumento2 páginasDiagrama de ParetoRemi GimenezAún no hay calificaciones
- Ventaja MecanicaDocumento12 páginasVentaja Mecanicacreynam100% (2)
- 3ra Parte LapreDocumento12 páginas3ra Parte LapreCarlos Gamarra OrzuzaAún no hay calificaciones
- Tension HomopolarDocumento1 páginaTension HomopolarPaul CameronAún no hay calificaciones
- GUIA # 7 FISICA - Construccion de GRAFICAS Parte 2 - AGOSTO (G-2) 10°01-DesarrolloDocumento5 páginasGUIA # 7 FISICA - Construccion de GRAFICAS Parte 2 - AGOSTO (G-2) 10°01-DesarrolloAndres Torres AAún no hay calificaciones
- Secciones ConicasDocumento21 páginasSecciones Conicasjeroglifico2014Aún no hay calificaciones
- Qué Entiendes Por Valor Medio de Una FunciónDocumento2 páginasQué Entiendes Por Valor Medio de Una Funciónerickson8867% (3)
- Laboratorios 1-3Documento3 páginasLaboratorios 1-3Sin Rodeos TechAún no hay calificaciones
- Lectura 3 Balances y EquilibrioDocumento13 páginasLectura 3 Balances y Equilibriodarr0916zAún no hay calificaciones
- Freixa I Baqué, E. (2008) - Reflexiones Críticas Acerca de La Transposición Del Modelo Médico A La Psicología Su Repercusión Sobre Los Peritajes Médico-Legales en Psiquiatría JurídicaDocumento8 páginasFreixa I Baqué, E. (2008) - Reflexiones Críticas Acerca de La Transposición Del Modelo Médico A La Psicología Su Repercusión Sobre Los Peritajes Médico-Legales en Psiquiatría JurídicaJon Irazabal ElorrietaAún no hay calificaciones
- Tarea de GestionDocumento7 páginasTarea de Gestiondevin quetzalAún no hay calificaciones
- Transformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.De EverandTransformación lineal directa: Aplicaciones prácticas y técnicas en visión por computadora.Aún no hay calificaciones
- Correlación cruzada: Desbloqueo de patrones en visión por computadoraDe EverandCorrelación cruzada: Desbloqueo de patrones en visión por computadoraAún no hay calificaciones
- Transformacion afin: Desbloqueo de perspectivas visuales: exploración de la transformación afín en visión por computadoraDe EverandTransformacion afin: Desbloqueo de perspectivas visuales: exploración de la transformación afín en visión por computadoraAún no hay calificaciones
- Estabilidad - Capitulo - 6 - Sistema de Alma Llena PDFDocumento30 páginasEstabilidad - Capitulo - 6 - Sistema de Alma Llena PDFAgustin VillalbaAún no hay calificaciones
- Estabilidad - Capitulo 7 - Equilibrio de Cuerpos VinculadosDocumento40 páginasEstabilidad - Capitulo 7 - Equilibrio de Cuerpos VinculadosAgustin VillalbaAún no hay calificaciones
- Estabilidad - Capitulo 10 - Sistema Plano de ReticuladoDocumento36 páginasEstabilidad - Capitulo 10 - Sistema Plano de ReticuladoAgustin VillalbaAún no hay calificaciones
- Estabilidad - Capitulo 11 - Momento de Segundo Orden de SuperficiesDocumento29 páginasEstabilidad - Capitulo 11 - Momento de Segundo Orden de SuperficiesAgustin VillalbaAún no hay calificaciones
- Álgebra y Geometría Analítica 2020Documento45 páginasÁlgebra y Geometría Analítica 2020Agustin VillalbaAún no hay calificaciones
- Apunte Teórico Algebra y Geometria Analitica PDFDocumento185 páginasApunte Teórico Algebra y Geometria Analitica PDFAgustin Villalba100% (1)
- Taller Expresiones-AlgebraicasDocumento2 páginasTaller Expresiones-AlgebraicasCamila Perez DiazAún no hay calificaciones
- LibroDocumento10 páginasLibroSergio Expósito MartínAún no hay calificaciones
- MA22A Ejercicios Resueltos 5 1Documento8 páginasMA22A Ejercicios Resueltos 5 1Gonzalo JimenezAún no hay calificaciones
- Guia Concepto VectoresDocumento27 páginasGuia Concepto VectoresJimena ScarichAún no hay calificaciones
- Modulo 10Documento12 páginasModulo 10Elizabeth Lopez HernandezAún no hay calificaciones
- Taller 4 - Expresiones Algebraicas - División Polinómica PDFDocumento2 páginasTaller 4 - Expresiones Algebraicas - División Polinómica PDFjopirAún no hay calificaciones
- Teoría de ConjuntosDocumento21 páginasTeoría de ConjuntospsychrizmwAún no hay calificaciones
- Laboratorio Actividad 3 Jorge NovoDocumento4 páginasLaboratorio Actividad 3 Jorge NovoJorge NovoAún no hay calificaciones
- Imct Hernandez Javier p1Documento11 páginasImct Hernandez Javier p1Jesus ivan Leon reyesAún no hay calificaciones
- Aritmetica1 Sesión 2 Números DecimalesDocumento55 páginasAritmetica1 Sesión 2 Números DecimalesClaudia DS100% (1)
- UNIDAD I - Vectores en IR2 y en IR3Documento22 páginasUNIDAD I - Vectores en IR2 y en IR3Maria VelizAún no hay calificaciones
- Codex Calculo I CompletoDocumento202 páginasCodex Calculo I CompletoKarla Gabriel80% (5)
- Tarea Multi FZDocumento8 páginasTarea Multi FZfernel zunñiga hernandezAún no hay calificaciones
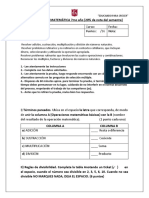
- EVALUACIÓN DE MATEMÁTICA 7mo Año AdecuadaDocumento6 páginasEVALUACIÓN DE MATEMÁTICA 7mo Año AdecuadaMacarena MarinAún no hay calificaciones
- Algebra2 CuestionarioDocumento3 páginasAlgebra2 CuestionarioDavid HeraldoAún no hay calificaciones
- Cuadernillo de Curso Master en Matematicas - OnlineDocumento199 páginasCuadernillo de Curso Master en Matematicas - OnlineAndres PitaAún no hay calificaciones
- ECUACIONES E INECUACIONES - TEORIA - PracticaDocumento16 páginasECUACIONES E INECUACIONES - TEORIA - PracticaKarine vanessa Ávila cruzAún no hay calificaciones
- Espacios VectorialesDocumento13 páginasEspacios VectorialesvictoriaAún no hay calificaciones
- Geometria Analitica 7 Ed PDFDocumento46 páginasGeometria Analitica 7 Ed PDFGustavo TecheiraAún no hay calificaciones
- Act. 6 - Propiedades de Los VectoresDocumento1 páginaAct. 6 - Propiedades de Los VectoresSelmy100% (2)
- Guia Estudio 1 CONJUNTOS NUMERICOSDocumento4 páginasGuia Estudio 1 CONJUNTOS NUMERICOSTERESA SEPULVEDAAún no hay calificaciones
- Anexo 1. Plantilla de Presentación Tarea 1 VanesaDocumento18 páginasAnexo 1. Plantilla de Presentación Tarea 1 VanesaAna CaceresAún no hay calificaciones
- PS-2315 Guía 3 Ejercicios de Convolución PDFDocumento11 páginasPS-2315 Guía 3 Ejercicios de Convolución PDFMiguel LandaverdeAún no hay calificaciones
- Inecuaciones y Sistemas Lineales Con Una IncognitaDocumento3 páginasInecuaciones y Sistemas Lineales Con Una IncognitaYapu ChuraAún no hay calificaciones
- Apunte Números EnterosDocumento26 páginasApunte Números EnterosVALERIA BENITOAún no hay calificaciones
- Polinomios Aritmeticos ..Documento1 páginaPolinomios Aritmeticos ..rcorreaingeomegaAún no hay calificaciones
- Algebra Nivel oDocumento51 páginasAlgebra Nivel oRA T. FrancoAún no hay calificaciones
- Guia Algebra I.Documento5 páginasGuia Algebra I.xbttoxAún no hay calificaciones