También podría gustarte
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- 2023 Practicas MSEP ELECTRONICA Version 1Documento23 páginas2023 Practicas MSEP ELECTRONICA Version 1Angel AguileraAún no hay calificaciones
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- ChipDocumento16 páginasChipGonzalo LozanoAún no hay calificaciones
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Control de Posicion de Un Servomecanismo de Corriente DirectaDocumento7 páginasControl de Posicion de Un Servomecanismo de Corriente DirectaNelson SantiagoAún no hay calificaciones
- SimilarDocumento11 páginasSimilarPierDonneeAún no hay calificaciones
- Especificaciones Tec, Funcionamiento, ListadoDocumento13 páginasEspecificaciones Tec, Funcionamiento, ListadoJohnKreamerAún no hay calificaciones
- Actividad 4Documento9 páginasActividad 4Jerson 5Aún no hay calificaciones
- Control de Motores Servos Usando Matlab y Un Pic16f628aDocumento10 páginasControl de Motores Servos Usando Matlab y Un Pic16f628aCristian Moya BejaranoAún no hay calificaciones
- Trabajo Colaborativo Final de Electronica Industrial PDFDocumento17 páginasTrabajo Colaborativo Final de Electronica Industrial PDFalberto rojasAún no hay calificaciones
- Práctica 2 - MicrocontroladoresDocumento5 páginasPráctica 2 - MicrocontroladoresKeyla KhonsAún no hay calificaciones
- INFORME DE LABORATORIO #02 VigilDocumento7 páginasINFORME DE LABORATORIO #02 Vigilalexander Sanchez MoralesAún no hay calificaciones
- Control ServomotorDocumento7 páginasControl ServomotorpruebaAún no hay calificaciones
- Control de Motores DC Arduino, Motores DC, Arduino, Proyectos Con Arduino PDFDocumento10 páginasControl de Motores DC Arduino, Motores DC, Arduino, Proyectos Con Arduino PDFYrvin EscorihuelaAún no hay calificaciones
- Actuador InfrarrojoDocumento12 páginasActuador Infrarrojovacio32Aún no hay calificaciones
- Módulo de SensadoDocumento9 páginasMódulo de SensadogalileoAún no hay calificaciones
- Proyecto Motor GeneradorDocumento26 páginasProyecto Motor Generadorjulian sanchezAún no hay calificaciones
- Proyecto Motor Generador 2Documento28 páginasProyecto Motor Generador 2julian sanchezAún no hay calificaciones
- Esteca55.ComDocumento4 páginasEsteca55.ComBen QrAún no hay calificaciones
- Variador de Velocidad AC Con Triac y PICDocumento10 páginasVariador de Velocidad AC Con Triac y PICjohnAún no hay calificaciones
- Tarea 2 - Juan Pablo Fernández Temoltzin - Movimientos Basicos RobotDocumento42 páginasTarea 2 - Juan Pablo Fernández Temoltzin - Movimientos Basicos RobotJuan Pablo FernándezAún no hay calificaciones
- Control DC Basado en Matlab PDFDocumento16 páginasControl DC Basado en Matlab PDFNoe Muñoz QuitoAún no hay calificaciones
- Control de MotoresDocumento22 páginasControl de MotoresDavid Ramirez NavarreteAún no hay calificaciones
- Ardurobotronica Manu4d90cbb599316Documento34 páginasArdurobotronica Manu4d90cbb599316Geiner David GranielAún no hay calificaciones
- Motor A Pasos de Izquierda y Derecha y Dos Puhs BotonDocumento14 páginasMotor A Pasos de Izquierda y Derecha y Dos Puhs Botonjuan sebastian perez martinez100% (1)
- Guialab 03Documento3 páginasGuialab 03Juan Carlos MamaniAún no hay calificaciones
- Sprint 3Documento21 páginasSprint 3David Barroso GAún no hay calificaciones
- Informe Del AscensorDocumento10 páginasInforme Del Ascensorradamanthys45157111Aún no hay calificaciones
- Tutorial Electr - Nica Circuitos Utiles Pulsador de Inyectores PDFDocumento4 páginasTutorial Electr - Nica Circuitos Utiles Pulsador de Inyectores PDFLuis Alberto BernalAún no hay calificaciones
- Tutorial Electrónica Circuitos Utiles Pulsador de InyectoresDocumento4 páginasTutorial Electrónica Circuitos Utiles Pulsador de Inyectoresmeca_2013joeAún no hay calificaciones
- ServosDocumento55 páginasServosSaul BarreraAún no hay calificaciones
- 09 Aprendiendoarduino - Wordpress.com-Motores ArduinoDocumento24 páginas09 Aprendiendoarduino - Wordpress.com-Motores ArduinoFelipe FelipeAún no hay calificaciones
- Control de Motores DC Con Micro Control Adores PICDocumento8 páginasControl de Motores DC Con Micro Control Adores PICPatariki Gastón Mansilla0% (1)
- Cómo Hacer Un SumobotDocumento20 páginasCómo Hacer Un SumobotJose Neira Galvez100% (1)
- Informe Final de Proyecto MicroprocesadorDocumento21 páginasInforme Final de Proyecto MicroprocesadorJordan Moncada TaboadaAún no hay calificaciones
- HL293DDocumento15 páginasHL293DRosio Evaristo VivarAún no hay calificaciones
- SLC Lab 6Documento6 páginasSLC Lab 6davidvalenAún no hay calificaciones
- Pra Hector ProgramasDocumento28 páginasPra Hector ProgramasYovas BautistaAún no hay calificaciones
- Lab 3 Robotica 29Documento8 páginasLab 3 Robotica 29arminAún no hay calificaciones
- Robot Seguidor de Línea Velocista Taller Final PDFDocumento107 páginasRobot Seguidor de Línea Velocista Taller Final PDFMauricio GonzalezAún no hay calificaciones
- 06 P02 DLP PiQ2Documento44 páginas06 P02 DLP PiQ2SANTOS LOPEZ LUIS ENRIQUEAún no hay calificaciones
- Control Motor CCDocumento5 páginasControl Motor CCDaniel RodarteAún no hay calificaciones
- Informe Seguidor de LineaDocumento27 páginasInforme Seguidor de LineaNicko Vivar0% (1)
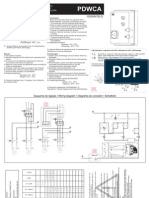
- WEG Instrucoes de Instalacao Pdwca 10000654785 Guia de Instalacao Portugues BRDocumento2 páginasWEG Instrucoes de Instalacao Pdwca 10000654785 Guia de Instalacao Portugues BRPaulo Luiz FrançaAún no hay calificaciones
- Tips Control de Motor Por Variador y PLCDocumento1 páginaTips Control de Motor Por Variador y PLCjapa209Aún no hay calificaciones
- TwidoDocumento39 páginasTwidoJef PerezAún no hay calificaciones
- Actividad Semana 2 Cesar VanegasDocumento8 páginasActividad Semana 2 Cesar VanegasCésarVanegas100% (1)
- Lab Sem 5 Control de Motor MPAP UnipolarDocumento8 páginasLab Sem 5 Control de Motor MPAP Unipolarwilliam coronadoAún no hay calificaciones
- Lab #14control ProporcionalDocumento10 páginasLab #14control ProporcionalMegaVector21Aún no hay calificaciones
- Control de ServomotoresDocumento8 páginasControl de ServomotoresJOSUÉ RAMIRO GUERRA FLORESAún no hay calificaciones
- Control de Motores Paso A Paso Con ArduinoDocumento35 páginasControl de Motores Paso A Paso Con ArduinoEfrainRodrigoAjataAún no hay calificaciones
- Practica Puente H V2Documento10 páginasPractica Puente H V2Jonathan DelgadoAún no hay calificaciones
- Informe Puente H L298NDocumento10 páginasInforme Puente H L298NEmilio EscalanteAún no hay calificaciones
- Lab15 - C16A - Quispe Romero, Steven - Alvarez CahuanaDocumento8 páginasLab15 - C16A - Quispe Romero, Steven - Alvarez CahuanaSteven Dave QRAún no hay calificaciones
- NRC5055 SolanoJonathan Unidad3 Laboratorio8 Control Motor DCDocumento49 páginasNRC5055 SolanoJonathan Unidad3 Laboratorio8 Control Motor DCJorge BalladaresAún no hay calificaciones
- Controlar Velocidad de Motor DC Por Ancho de PulsoDocumento11 páginasControlar Velocidad de Motor DC Por Ancho de PulsoJose Luis Apaza CortesAún no hay calificaciones
- Informe Seguidor de LineaDocumento27 páginasInforme Seguidor de LineamikelkatenaAún no hay calificaciones
- PLC ElectroneumaticaDocumento13 páginasPLC ElectroneumaticaLuis Alberto Zapata OjedaAún no hay calificaciones
- Controladores Pid Analogo1Documento20 páginasControladores Pid Analogo1diego197519199139Aún no hay calificaciones
- Lamina 5Documento1 páginaLamina 5Juan Eduardo GivovichAún no hay calificaciones
- Plan de Gestión de Desarrollo Económico Local Comuna de Cartagena - PGDELDocumento137 páginasPlan de Gestión de Desarrollo Económico Local Comuna de Cartagena - PGDELJuan Eduardo GivovichAún no hay calificaciones
- ¿Como Funciona?Documento17 páginas¿Como Funciona?Juan Eduardo GivovichAún no hay calificaciones
- Diagrama de CableadoDocumento10 páginasDiagrama de CableadoJuan Eduardo GivovichAún no hay calificaciones
- Pines de 74HC595 y Sus FuncionesDocumento10 páginasPines de 74HC595 y Sus FuncionesJuan Eduardo GivovichAún no hay calificaciones
- 1 - Instructivo General Practica IV Prof. ARQ UCENDocumento2 páginas1 - Instructivo General Practica IV Prof. ARQ UCENJuan Eduardo GivovichAún no hay calificaciones
- C Code 13 UltrasonidoDocumento10 páginasC Code 13 UltrasonidoJuan Eduardo GivovichAún no hay calificaciones
- Super Sater Kit For Raspberry Pi (001-010) .En - EsDocumento10 páginasSuper Sater Kit For Raspberry Pi (001-010) .En - EsJuan Eduardo GivovichAún no hay calificaciones
- Super Sater Kit For Raspberry Pi (021-030) .En - EsDocumento10 páginasSuper Sater Kit For Raspberry Pi (021-030) .En - EsJuan Eduardo GivovichAún no hay calificaciones
- Super Sater Kit For Raspberry Pi (031-040) .En - EsDocumento10 páginasSuper Sater Kit For Raspberry Pi (031-040) .En - EsJuan Eduardo GivovichAún no hay calificaciones
- Super Sater Kit For Raspberry Pi (011-020) .En - EsDocumento10 páginasSuper Sater Kit For Raspberry Pi (011-020) .En - EsJuan Eduardo GivovichAún no hay calificaciones
- KursaalDocumento9 páginasKursaalJuan Eduardo Givovich0% (1)
- 0341 Aq-Giannini FDocumento140 páginas0341 Aq-Giannini FJuan Eduardo GivovichAún no hay calificaciones
- Actividad 6Documento6 páginasActividad 6Fernanado RodriguezAún no hay calificaciones
- AutoCad 2020.1 Final (Español e Ingles) 32 y 64 Bits Full (Mega)Documento3 páginasAutoCad 2020.1 Final (Español e Ingles) 32 y 64 Bits Full (Mega)Samuel HerediaAún no hay calificaciones
- Manual Librerias BIM AmancoDocumento43 páginasManual Librerias BIM AmancoJose MiguelAún no hay calificaciones
- Leonardo Romero - Resumen CurricularDocumento3 páginasLeonardo Romero - Resumen CurricularLeonardo Romero RamirezAún no hay calificaciones
- MH4202Documento1 páginaMH4202Iucary S. UbietaAún no hay calificaciones
- S - Template2019 PerúDocumento5 páginasS - Template2019 PerúAdela Retuerto ParedesAún no hay calificaciones
- Actividad 3 Servicio Al ClienteDocumento3 páginasActividad 3 Servicio Al Clientelina lugo100% (1)
- Tarea 4 Sistemas de Control - 2021Documento6 páginasTarea 4 Sistemas de Control - 2021Carlos Gomez T.Aún no hay calificaciones
- Capitulo IV - 4.buscar-PatronDocumento8 páginasCapitulo IV - 4.buscar-PatronDANIEL SAJCHE CABAún no hay calificaciones
- Antecedentes (Geomatica)Documento1 páginaAntecedentes (Geomatica)alex fabianAún no hay calificaciones
- Inventario 2.0Documento21 páginasInventario 2.0Luis SanchezAún no hay calificaciones
- Caso UpsDocumento4 páginasCaso UpsYanixa MéridaAún no hay calificaciones
- 1 - 1 CienciasDeLaComputacionDocumento35 páginas1 - 1 CienciasDeLaComputacionCultura Para LlevarAún no hay calificaciones
- Tutorial de ABAP AvanzadaDocumento13 páginasTutorial de ABAP AvanzadaSAP IT CSSAún no hay calificaciones
- La Transmisión Síncrona Es Una Técnica Que Consiste en El Envío de Una Trama de DatosDocumento1 páginaLa Transmisión Síncrona Es Una Técnica Que Consiste en El Envío de Una Trama de DatosПэньялоса СипактлиAún no hay calificaciones
- Con Todos Los Nros II - DocenteDocumento30 páginasCon Todos Los Nros II - DocenteNada X Acá50% (4)
- Mochila Antirrobos WordDocumento5 páginasMochila Antirrobos WordJesus Antonio Rios HumpireAún no hay calificaciones
- Mapa Conceptual UmlDocumento1 páginaMapa Conceptual Umlangel bejarano baenaAún no hay calificaciones
- ContratoDocumento16 páginasContratothais brito ramosAún no hay calificaciones
- Guía M2 A1Documento5 páginasGuía M2 A1JULIAN ANDRES DURANGO OCHOAAún no hay calificaciones
- Taller 1Documento3 páginasTaller 1YEISON ALBERTO GONZALEZ BERNALAún no hay calificaciones
- API RestDocumento5 páginasAPI RestruderAún no hay calificaciones
- Privacidad DigitalDocumento9 páginasPrivacidad Digitaldr345273Aún no hay calificaciones
- Novared T&S S.A.SDocumento5 páginasNovared T&S S.A.SAlex CalderónAún no hay calificaciones
- Cuadro Comparativo Sober Ventajas y Desventajas Del Uso de Las Tics en EducaciónDocumento3 páginasCuadro Comparativo Sober Ventajas y Desventajas Del Uso de Las Tics en Educaciónlos cracks buenos100% (1)
- Estrategias de NetflixDocumento2 páginasEstrategias de NetflixMario Montenegro100% (1)
- CAMBIOS justificacionEjecutableNEXUS 13 9Documento3 páginasCAMBIOS justificacionEjecutableNEXUS 13 9Fredd EverssonAún no hay calificaciones
- Informe EADocumento10 páginasInforme EAEdinson Flores SusanibarAún no hay calificaciones
- El Tutorial de PythonDocumento4 páginasEl Tutorial de PythonmilagrosAún no hay calificaciones
- G SeguridadDocumento9 páginasG SeguridadCarlos Julio Santos BarbosaAún no hay calificaciones
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- Arte y gestión de la producción audiovisualDe EverandArte y gestión de la producción audiovisualCalificación: 3 de 5 estrellas3/5 (2)
- 44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchDe Everand44 Apps Inteligentes para Ejercitar su Cerebro: Apps Gratuitas, Juegos, y Herramientas para iPhone, iPad, Google Play, Kindle Fire, Navegadores de Internet, Windows Phone, & Apple WatchCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Lean Startup: Cómo trabajar de manera más inteligente y no más duro mientras se innova más rápido y se satisface a los clientesDe EverandLean Startup: Cómo trabajar de manera más inteligente y no más duro mientras se innova más rápido y se satisface a los clientesCalificación: 4 de 5 estrellas4/5 (8)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanDe EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanCalificación: 5 de 5 estrellas5/5 (1)
- JavaScript Una Guía de Aprendizaje para el Lenguaje de Programación JavaScriptDe EverandJavaScript Una Guía de Aprendizaje para el Lenguaje de Programación JavaScriptCalificación: 3 de 5 estrellas3/5 (5)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)
- GuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoDe EverandGuíaBurros Microsoft Excel: Todo lo que necesitas saber sobre esta potente hoja de cálculoCalificación: 3.5 de 5 estrellas3.5/5 (6)
- Bases de datos relacionales y modelado de datos. IFCT0310De EverandBases de datos relacionales y modelado de datos. IFCT0310Aún no hay calificaciones
- Kanban: La guía definitiva de la metodología Kanban para el desarrollo de software ágil (Libro en Español/Kanban Spanish Book)De EverandKanban: La guía definitiva de la metodología Kanban para el desarrollo de software ágil (Libro en Español/Kanban Spanish Book)Calificación: 4.5 de 5 estrellas4.5/5 (6)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- Aprender Docker, un enfoque prácticoDe EverandAprender Docker, un enfoque prácticoCalificación: 5 de 5 estrellas5/5 (3)
- Fundamentos de bases de datos: Notas de referenciaDe EverandFundamentos de bases de datos: Notas de referenciaAún no hay calificaciones
- Criptografía sin secretos con Python: Spyware/Programa espíaDe EverandCriptografía sin secretos con Python: Spyware/Programa espíaCalificación: 5 de 5 estrellas5/5 (4)