100% encontró este documento útil (1 voto)
557 vistas2 páginasFormulario Cálculo Iii
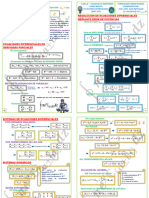
Este documento presenta un resumen de diferentes tipos de ecuaciones diferenciales de primer y segundo orden, así como métodos para resolverlas. Se describen ecuaciones diferenciales de primer orden como las separables, homogéneas, lineales y de Bernoulli. También se explican conceptos como ecuaciones diferenciales exactas y de Riccati. Para ecuaciones de segundo orden y superiores, se detallan métodos como variación de parámetros y teoremas abreviados. Finalmente, se incluyen aplicaciones de ecuaciones diferenciales a áreas como crecimiento pob
Cargado por
Carlos AnteloDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
100% encontró este documento útil (1 voto)
557 vistas2 páginasFormulario Cálculo Iii
Este documento presenta un resumen de diferentes tipos de ecuaciones diferenciales de primer y segundo orden, así como métodos para resolverlas. Se describen ecuaciones diferenciales de primer orden como las separables, homogéneas, lineales y de Bernoulli. También se explican conceptos como ecuaciones diferenciales exactas y de Riccati. Para ecuaciones de segundo orden y superiores, se detallan métodos como variación de parámetros y teoremas abreviados. Finalmente, se incluyen aplicaciones de ecuaciones diferenciales a áreas como crecimiento pob
Cargado por
Carlos AnteloDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd