También podría gustarte
- Tarea 3-Mario Diago - Limite y ContinuidadDocumento7 páginasTarea 3-Mario Diago - Limite y ContinuidadJuan Camilo RodriguezAún no hay calificaciones
- Punto 3Documento4 páginasPunto 3Ronald LaraAún no hay calificaciones
- Cálculo DiferencialDocumento7 páginasCálculo DiferencialStephany PinzónAún no hay calificaciones
- Anexo 2 - Ejercicios Tarea 2Documento7 páginasAnexo 2 - Ejercicios Tarea 2Yasmín RiveraAún no hay calificaciones
- Camila CalculoDocumento4 páginasCamila CalculoMaria camila Jaramillo ramosAún no hay calificaciones
- Tarea S2Documento5 páginasTarea S2felipe andres cruz pezoaAún no hay calificaciones
- Segunda Guia de Limites para El Examen Parcial de Calculo DiferencialDocumento2 páginasSegunda Guia de Limites para El Examen Parcial de Calculo DiferencialDiego HernándezAún no hay calificaciones
- Jordan - Pizarro Tareas2Documento6 páginasJordan - Pizarro Tareas2Jordan PizarroAún no hay calificaciones
- 02 EMCEA U1 A2 Jhonathan HernandezDocumento4 páginas02 EMCEA U1 A2 Jhonathan HernandezJhonathan Hernandez de la CruzAún no hay calificaciones
- Calcular El Siguiente Límite Indeterminado de La Forma 00 Presentado El Paso A Paso Del Desarrollo y Su RespuestaDocumento4 páginasCalcular El Siguiente Límite Indeterminado de La Forma 00 Presentado El Paso A Paso Del Desarrollo y Su Respuestamurillolau54Aún no hay calificaciones
- Martinez Marquez MariaGuadalupe Actividad7 Ejercicios1Documento3 páginasMartinez Marquez MariaGuadalupe Actividad7 Ejercicios1lupita MartinezAún no hay calificaciones
- Quiroz-Ricardo-LimitesInfinitos Act3Documento2 páginasQuiroz-Ricardo-LimitesInfinitos Act3elpipienAún no hay calificaciones
- Trabajo Colaborativo TAREA 2Documento30 páginasTrabajo Colaborativo TAREA 2Shayra CañonAún no hay calificaciones
- Trabajo Colaborativo TAREA 2Documento33 páginasTrabajo Colaborativo TAREA 2Alexandra BurgosAún no hay calificaciones
- Límites y Continuidad de Una FunciónDocumento4 páginasLímites y Continuidad de Una FunciónVíktor Jesús SAún no hay calificaciones
- Taller LimitesDocumento5 páginasTaller LimitesSebastian SilvaAún no hay calificaciones
- Actividad de Aprendizaje 7Documento2 páginasActividad de Aprendizaje 7Emanuel Galicia PalominoAún no hay calificaciones
- Ecuaciones Racionales Parte 1Documento2 páginasEcuaciones Racionales Parte 1Enrique YoplaAún no hay calificaciones
- Tarea 2 - LidianaDocumento7 páginasTarea 2 - LidianaJuan UpeguiAún no hay calificaciones
- Lista de Ejercicios 5 Mate I Sipan 2015iDocumento2 páginasLista de Ejercicios 5 Mate I Sipan 2015iRx ChinguelAún no hay calificaciones
- Taller Limites 1-3Documento3 páginasTaller Limites 1-3Sebastian SilvaAún no hay calificaciones
- Cálculo DiferencialDocumento4 páginasCálculo DiferencialBenjaminAún no hay calificaciones
- MezaPerezPaul 5 2Documento3 páginasMezaPerezPaul 5 2Paul Meza perezAún no hay calificaciones
- TALLER # 1. Conceptos Matematicos Basicos.Documento12 páginasTALLER # 1. Conceptos Matematicos Basicos.Cronos MiguelAún no hay calificaciones
- Actividad 3Documento2 páginasActividad 3DiegoAún no hay calificaciones
- 02.tarea 2 - Erica MoraDocumento12 páginas02.tarea 2 - Erica Moraerica mora sanhezAún no hay calificaciones
- Desarrollo Guía 7 MatematicasDocumento13 páginasDesarrollo Guía 7 MatematicasBrayan Camilo MillanAún no hay calificaciones
- Anexo 2 - Ejercicios Tarea 3 Juan JoseDocumento7 páginasAnexo 2 - Ejercicios Tarea 3 Juan JoseNicolas Rey LeónAún no hay calificaciones
- Calculo IDocumento5 páginasCalculo Irodrigo moraAún no hay calificaciones
- Representación de Límites y ContinuidadDocumento7 páginasRepresentación de Límites y ContinuidadGuadalupe Quiñónez CervantesAún no hay calificaciones
- Trabajo de MateDocumento4 páginasTrabajo de MateFrancis David Navarro DuránAún no hay calificaciones
- Solucion ActividadDocumento3 páginasSolucion ActividadLucas BurbanoAún no hay calificaciones
- Calculo Diferencial Tarea 3Documento6 páginasCalculo Diferencial Tarea 3lorenAún no hay calificaciones
- Colaborativo - Tarea 2Documento24 páginasColaborativo - Tarea 2DManuel CarmonaAún no hay calificaciones
- Calculo LimiteDocumento6 páginasCalculo LimiteAntonio Tobias Rodriguez PerazaAún no hay calificaciones
- Práctica 8.1 Ejercicios de Continuidades y DiscontinuidadesDocumento3 páginasPráctica 8.1 Ejercicios de Continuidades y DiscontinuidadesFrandy LantiguaAún no hay calificaciones
- Ejercicios LimiteDocumento3 páginasEjercicios LimiteGabriel Delgado100% (1)
- Control de Ecuaciones Integrantes: Cristobal Faúndez, Sebastián Olave y Renata VilchesDocumento4 páginasControl de Ecuaciones Integrantes: Cristobal Faúndez, Sebastián Olave y Renata VilchesPabloAún no hay calificaciones
- Examen Límites 1º BACHDocumento4 páginasExamen Límites 1º BACHAlejandro PerezAún no hay calificaciones
- Limites 2010 Undecimo GradoDocumento12 páginasLimites 2010 Undecimo GradoJorge Issac Pajon GomezAún no hay calificaciones
- Anexo 2 - Ejercicios Tarea 3Documento6 páginasAnexo 2 - Ejercicios Tarea 3Mailen GascaAún no hay calificaciones
- EcuacionesDocumento9 páginasEcuacionesJerson AndresAún no hay calificaciones
- Cálculo 1Documento4 páginasCálculo 1Javier Contreras RiosAún no hay calificaciones
- Cálculo Semana 2Documento4 páginasCálculo Semana 2Javier Contreras RiosAún no hay calificaciones
- 1 - Limite de Funciones - R50Documento7 páginas1 - Limite de Funciones - R50Maria Fernanda YaupiAún no hay calificaciones
- Operaciones Entre LimitesDocumento5 páginasOperaciones Entre LimitesMARK ERIKSON KELLY PEREZAún no hay calificaciones
- Avance Ejercicios Tarea 2 Yerson RincónDocumento9 páginasAvance Ejercicios Tarea 2 Yerson RincónYerson RinconAún no hay calificaciones
- Encuentro 4.1-2Documento8 páginasEncuentro 4.1-2jhonattan lopezAún no hay calificaciones
- Sol EcuacionesDocumento10 páginasSol EcuacionesANBU BIAún no hay calificaciones
- Alejandro - Puentes - Tarea S2Documento7 páginasAlejandro - Puentes - Tarea S2jonathanAún no hay calificaciones
- Actividad Evaluativa - Eje 2 - Calculo DiferencialDocumento11 páginasActividad Evaluativa - Eje 2 - Calculo Diferencialcesar BohorquezAún no hay calificaciones
- Prueba de Desarrollo CDDocumento9 páginasPrueba de Desarrollo CDFERNANDO REYNER TEJEDA MOTTAAún no hay calificaciones
- Neptali Vivas Tareas5Documento5 páginasNeptali Vivas Tareas5Neptali VivasAún no hay calificaciones
- Juan Parra - TAREA - 3 Calculo DiferencialDocumento8 páginasJuan Parra - TAREA - 3 Calculo Diferencialjuan andres parra urianAún no hay calificaciones
- I1 PautaDocumento9 páginasI1 PautaJota MehAún no hay calificaciones
- Limites Clase 1Documento3 páginasLimites Clase 1DANIEL ALBERTO ARMAS REALAún no hay calificaciones
- Soluciones Ex. Ec. e In.Documento5 páginasSoluciones Ex. Ec. e In.jmanuel0032Aún no hay calificaciones
- Ejercicios Literal EDocumento6 páginasEjercicios Literal ECristian RuizAún no hay calificaciones
- Exjun 19Documento3 páginasExjun 19A D E LAún no hay calificaciones
- Exjun 18Documento3 páginasExjun 18A D E LAún no hay calificaciones
- Exjun 14Documento2 páginasExjun 14A D E LAún no hay calificaciones
- Exjul 18Documento3 páginasExjul 18A D E LAún no hay calificaciones
- Exjun 14Documento2 páginasExjun 14A D E LAún no hay calificaciones
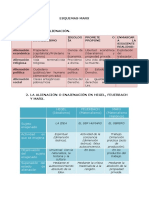
- ESQUEMAS MarxDocumento1 páginaESQUEMAS MarxA D E LAún no hay calificaciones
- Tema y TesisDocumento3 páginasTema y TesisA D E LAún no hay calificaciones
- Garcia Hernandez Karen LilianaDocumento5 páginasGarcia Hernandez Karen LilianaJanet MaReAún no hay calificaciones
- Ensayo OLAP Base de DatosDocumento5 páginasEnsayo OLAP Base de DatosahroverAún no hay calificaciones
- PHP Con MysqlDocumento21 páginasPHP Con MysqlAndrés MarroquínAún no hay calificaciones
- Fijación Del Precio de VentaDocumento5 páginasFijación Del Precio de VentaEqaquarthaz96Aún no hay calificaciones
- Actron Autoscaner CP9575 PDFDocumento16 páginasActron Autoscaner CP9575 PDFMelvin R. CisnerosAún no hay calificaciones
- Procedimiento de Bioseguridad Facultad de EnfermeríaDocumento46 páginasProcedimiento de Bioseguridad Facultad de EnfermeríaDoris Flores TAún no hay calificaciones
- Hematologia ForenseDocumento46 páginasHematologia ForenseManuel Hernandez Luis100% (1)
- Memorial de Divorcio Ordinario (Gustavo)Documento6 páginasMemorial de Divorcio Ordinario (Gustavo)gustavoochaetaAún no hay calificaciones
- Resultados CD Primarias Ter Por Mesa 1Documento84 páginasResultados CD Primarias Ter Por Mesa 1Yulitza MoralesAún no hay calificaciones
- Contrato NuevoDocumento5 páginasContrato NuevoBayardo GadeaAún no hay calificaciones
- Album de Las VitaminasDocumento19 páginasAlbum de Las VitaminasLynn Danilla de Salvattecci75% (4)
- Mat - JUEVES 6 - 3°Documento7 páginasMat - JUEVES 6 - 3°maria santosAún no hay calificaciones
- Clase Hibridacion in Situ 2016Documento24 páginasClase Hibridacion in Situ 2016Julissa Alejandra Barturen SandovalAún no hay calificaciones
- Dice Una Linda Leyenda Árabe Que Dos Amigos Viajaban Por El Desierto y en Un Determinado Punto Del Viaje DiscutieronDocumento7 páginasDice Una Linda Leyenda Árabe Que Dos Amigos Viajaban Por El Desierto y en Un Determinado Punto Del Viaje Discutieronspp13Aún no hay calificaciones
- Aa4 Micro ServomotoresDocumento2 páginasAa4 Micro ServomotoresAnonymous cb3T8UlAún no hay calificaciones
- FIT YOUR DIET Calculadora Automática PBO© PDFDocumento22 páginasFIT YOUR DIET Calculadora Automática PBO© PDFNuria G G100% (1)
- Escalada en Cueva de La AzohíaDocumento1 páginaEscalada en Cueva de La AzohíacarmenAún no hay calificaciones
- Los Procesos Del Diagnostico PDFDocumento6 páginasLos Procesos Del Diagnostico PDFalexbarcolAún no hay calificaciones
- 1074 10 01 1640 MD 001Documento15 páginas1074 10 01 1640 MD 001Jose Antonio Salazar HidalgoAún no hay calificaciones
- PecDocumento10 páginasPecÁngeles Sampedro PérezAún no hay calificaciones
- Amplian Vigencia de Medidas Extraordinarias Relacionadas Al Resolucion No 109 2019 Cdosiptel 1802011 1Documento3 páginasAmplian Vigencia de Medidas Extraordinarias Relacionadas Al Resolucion No 109 2019 Cdosiptel 1802011 1Carlos AvilaAún no hay calificaciones
- Solucionario 7 PDFDocumento112 páginasSolucionario 7 PDFrios25% (4)
- Las Oraciones Afirmativas PDFDocumento6 páginasLas Oraciones Afirmativas PDFEliza MoralesAún no hay calificaciones
- ESQUEMAS - Diagrama de Esquemas Maladaptativos TempranosDocumento5 páginasESQUEMAS - Diagrama de Esquemas Maladaptativos TempranosMariella100% (3)
- Historia Parcial I 2018 PDFDocumento114 páginasHistoria Parcial I 2018 PDFCarlos ColajAún no hay calificaciones
- Fac 004-002-000000219Documento1 páginaFac 004-002-000000219MOOM SublimacionesAún no hay calificaciones
- Analisis ERE GURTELDocumento3 páginasAnalisis ERE GURTELdavidtobAún no hay calificaciones
- U01.1 Metrologia Unidad 1 2020 SEGUNDA EDICIONDocumento18 páginasU01.1 Metrologia Unidad 1 2020 SEGUNDA EDICIONProfe CHavesAún no hay calificaciones
- Quia de Apoyo Habilidades Socio-Emocionales para La Vida.Documento22 páginasQuia de Apoyo Habilidades Socio-Emocionales para La Vida.mayimeg100% (2)
- Caso TipnisDocumento5 páginasCaso TipnisMireya Condori MancillaAún no hay calificaciones