También podría gustarte
- 03 - Errores RZ - Rev0.0Documento10 páginas03 - Errores RZ - Rev0.0ANTONIO ESTEBAN ESCOBAR MORALESAún no hay calificaciones
- Tema 2 ErroresDocumento8 páginasTema 2 ErroresmarisaciratAún no hay calificaciones
- Evaluación de resultados analíticos: error, precisión y exactitudDocumento44 páginasEvaluación de resultados analíticos: error, precisión y exactitudDoina MarquezAún no hay calificaciones
- ErroresDocumento3 páginasErroresCamiAún no hay calificaciones
- Resumen de Teoria de ErroresDocumento5 páginasResumen de Teoria de Erroresch2n100% (1)
- Práctica 1 Regresión Lineal y Análisis de Datos.Documento10 páginasPráctica 1 Regresión Lineal y Análisis de Datos.Valesska SánchezAún no hay calificaciones
- Análisis estadístico de mediciones electrónicasDocumento11 páginasAnálisis estadístico de mediciones electrónicasjavier lipaAún no hay calificaciones
- Guía de laboratorio de Física I sobre teoría de erroresDocumento13 páginasGuía de laboratorio de Física I sobre teoría de erroresÉrick O. Apaico AlvaradoAún no hay calificaciones
- Teoria de ErroresDocumento9 páginasTeoria de ErroresLuis Alberto Zapata VillegasAún no hay calificaciones
- Errores en El Análisis Clásico/estadísticaDocumento4 páginasErrores en El Análisis Clásico/estadísticaPaulaAún no hay calificaciones
- 2 Errores Sistemáticos y AleatoriosDocumento26 páginas2 Errores Sistemáticos y AleatoriosJunior Kenide Arroyo100% (1)
- Evaluación Datos Estadísticos PDFDocumento32 páginasEvaluación Datos Estadísticos PDFSofy TaylorAún no hay calificaciones
- Tema 5 Cálculo de ErroresDocumento22 páginasTema 5 Cálculo de ErroresMartina Segui LlabresAún no hay calificaciones
- Práctica 1. Error de La Medida.c3 PDFDocumento7 páginasPráctica 1. Error de La Medida.c3 PDFjorge mendezAún no hay calificaciones
- Tema 3Documento34 páginasTema 3Felix MendozaAún no hay calificaciones
- Unidad - 1 - Teoria de ErroresDocumento38 páginasUnidad - 1 - Teoria de ErroresJose Luis ScarzelloAún no hay calificaciones
- Incertidumbre en La MedidaDocumento3 páginasIncertidumbre en La MedidaYonathan GonzálezAún no hay calificaciones
- Guia de Laboratorio 1 MEDICIONES E INCERTIDUMBREDocumento8 páginasGuia de Laboratorio 1 MEDICIONES E INCERTIDUMBREvictor DanielAún no hay calificaciones
- CalibracionDocumento13 páginasCalibracionMaayra Diiane HCAún no hay calificaciones
- Práctica 1. Error de La Medida. Primera Parte.Documento7 páginasPráctica 1. Error de La Medida. Primera Parte.Lisandro MoraAún no hay calificaciones
- Informe Teoria de Errores. 1Documento19 páginasInforme Teoria de Errores. 1Samantha PinzonAún no hay calificaciones
- Informe Hsap Teoria de ErroresDocumento20 páginasInforme Hsap Teoria de ErroresSamantha PinzonAún no hay calificaciones
- Teoría de Errores - Parcialmente AcabadoDocumento17 páginasTeoría de Errores - Parcialmente Acabadoseifer87100% (5)
- TEORIA de ERRORES-Ia-2019Documento38 páginasTEORIA de ERRORES-Ia-2019Fernando IllanesAún no hay calificaciones
- Fisica I - Exp1Documento9 páginasFisica I - Exp1Mia OtaraAún no hay calificaciones
- Laboratorio 1 - Teoria de ErroresDocumento7 páginasLaboratorio 1 - Teoria de ErroresALBA YANETHAún no hay calificaciones
- EXCEL en Química AnalíticaDocumento47 páginasEXCEL en Química AnalíticaJuan Cho100% (1)
- Mediciones y Cálculo de ErroresDocumento10 páginasMediciones y Cálculo de Erroresgretty edithAún no hay calificaciones
- Calibración Instrumental Análisis QuímicoDocumento13 páginasCalibración Instrumental Análisis QuímicoLuis FrancoAún no hay calificaciones
- 01_TEORIA DE ERRORES Y DISTRIBUCIÓN DE GAUSSDocumento6 páginas01_TEORIA DE ERRORES Y DISTRIBUCIÓN DE GAUSSernestochoque2006Aún no hay calificaciones
- Toma de Datos e Introducción Al Análisis Del Error, Pre - Informe.Documento18 páginasToma de Datos e Introducción Al Análisis Del Error, Pre - Informe.fabian yesid palma coelloAún no hay calificaciones
- I. Objetivos:: Material InformativoDocumento10 páginasI. Objetivos:: Material InformativoTapia Saenz Alex DanielAún no hay calificaciones
- Física I - Práctica de Laboratorio 02 - Mediciones He IncertidumbresDocumento39 páginasFísica I - Práctica de Laboratorio 02 - Mediciones He IncertidumbresKenny Anderson100% (1)
- Lanchimba Tutillo Alexis Javier - Victor Stalin Paca - Errores en Las Medidas - Jue14Documento5 páginasLanchimba Tutillo Alexis Javier - Victor Stalin Paca - Errores en Las Medidas - Jue14Jordy ViscainoAún no hay calificaciones
- LABORATORIO 1 (Datos Experimentales)Documento13 páginasLABORATORIO 1 (Datos Experimentales)Andrés ORAún no hay calificaciones
- Trabajo EstimacionDocumento8 páginasTrabajo EstimacionLibardo SánchezAún no hay calificaciones
- Informe ElasticidadDocumento13 páginasInforme ElasticidadAreelii VaaldeezAún no hay calificaciones
- Pregunta 2 TADocumento3 páginasPregunta 2 TAPIERO MATIAS HERRERA SUAREZAún no hay calificaciones
- Análisis Estadístico Aplicado A La Química AnaliticaDocumento27 páginasAnálisis Estadístico Aplicado A La Química AnaliticaGustavo MorenoAún no hay calificaciones
- Teoría de ErroresDocumento17 páginasTeoría de ErroresjazminAún no hay calificaciones
- 1_guia de Laboratorio_nº 1(1)(1)Documento7 páginas1_guia de Laboratorio_nº 1(1)(1)Angel Olortegui VillegasAún no hay calificaciones
- Laboratorio 1 Grupo 1 10158Documento12 páginasLaboratorio 1 Grupo 1 10158Miguel ArauzAún no hay calificaciones
- Medición e IncertidumbreDocumento19 páginasMedición e IncertidumbreTana AllysonAún no hay calificaciones
- Introducción A La Teoría de ErroresDocumento6 páginasIntroducción A La Teoría de ErroresFrancisco Gabriel Puga LojoAún no hay calificaciones
- Laboratorio CirculosDocumento5 páginasLaboratorio CirculosIvonneRoJasDiazAún no hay calificaciones
- Analisis DatosDocumento9 páginasAnalisis DatosLucero BardalesAún no hay calificaciones
- CBF210L Pract 00 (Errores)Documento4 páginasCBF210L Pract 00 (Errores)Jhon SnowAún no hay calificaciones
- UNM-Métodos de regresión lineal y análisis de datos experimentalesDocumento106 páginasUNM-Métodos de regresión lineal y análisis de datos experimentalesLuna Maria Esperanza Sanchez SolanoAún no hay calificaciones
- Guia Laboratorio Electromagnetismo 2015 PDFDocumento40 páginasGuia Laboratorio Electromagnetismo 2015 PDFJuan Francisco Vera AbarcaAún no hay calificaciones
- Clase 2Documento33 páginasClase 2Juan P HDAún no hay calificaciones
- Análisis estadístico de datosDocumento3 páginasAnálisis estadístico de datosDeibi MenesesAún no hay calificaciones
- 1 - Guia de Laboratorio - Nº 1Documento9 páginas1 - Guia de Laboratorio - Nº 1Gabbi MallquiAún no hay calificaciones
- Estadística básica para la ciencia del cuidado humanoDe EverandEstadística básica para la ciencia del cuidado humanoAún no hay calificaciones
- Curva ROC y la teoría de las decisiones en las Ciencias de la SaludDe EverandCurva ROC y la teoría de las decisiones en las Ciencias de la SaludAún no hay calificaciones
- Razonamiento cuantitativo: Notas de claseDe EverandRazonamiento cuantitativo: Notas de claseCalificación: 5 de 5 estrellas5/5 (1)
- Conocidos Los Tres LadosDocumento18 páginasConocidos Los Tres LadosJonathanAún no hay calificaciones
- Teoremas de Neper para la resolución de triángulos utilizando grados, minutos y segundosDocumento3 páginasTeoremas de Neper para la resolución de triángulos utilizando grados, minutos y segundosJonathanAún no hay calificaciones
- Conocidos Los Tres LadosDocumento48 páginasConocidos Los Tres LadosJonathanAún no hay calificaciones
- Guía 2 Cálculo de Coordenadas. Unidad 1Documento11 páginasGuía 2 Cálculo de Coordenadas. Unidad 1Jonathan0% (1)
- Errores de P Y T° Dist Electrónica (M) : 807.000 0.000 P (Hpa) : 650 25 Hpa T (°C) : 31 0 °C Hi (M) : 1.500 0.001 HP (M) : 1.800 0.001Documento5 páginasErrores de P Y T° Dist Electrónica (M) : 807.000 0.000 P (Hpa) : 650 25 Hpa T (°C) : 31 0 °C Hi (M) : 1.500 0.001 HP (M) : 1.800 0.001JonathanAún no hay calificaciones
- Guía N°1 - Ajuste de Mediciones - U1Documento4 páginasGuía N°1 - Ajuste de Mediciones - U1JonathanAún no hay calificaciones
- Guía N°1.: Unidad 1: Las Relaciones Entre Topografía y TrigonometríaDocumento8 páginasGuía N°1.: Unidad 1: Las Relaciones Entre Topografía y TrigonometríaJonathanAún no hay calificaciones
- Ayuda3-Descripción Numérica de La Variable.Documento38 páginasAyuda3-Descripción Numérica de La Variable.Michael Pawelczyk JooAún no hay calificaciones
- Econometría Aplicada: Evaluación de Política MacroeconómicaDocumento2 páginasEconometría Aplicada: Evaluación de Política MacroeconómicaHerbert Manuel Mayo UrtechoAún no hay calificaciones
- Quiz 2 - Semana 6 ProbabilidadDocumento11 páginasQuiz 2 - Semana 6 Probabilidadkaty_meza_240% (5)
- MEDIDAS DE TENDENCIA CENTRAL Y DISPERSIÓNDocumento31 páginasMEDIDAS DE TENDENCIA CENTRAL Y DISPERSIÓNJean Franco De La CruzAún no hay calificaciones
- Respuestás de Practica de Intervalo Con TDocumento5 páginasRespuestás de Practica de Intervalo Con Trichard vazquezAún no hay calificaciones
- Taller N°1 PDFDocumento4 páginasTaller N°1 PDFFabian Andres Jacome PallaresAún no hay calificaciones
- Cuadro Sinóptico Ejercicio 1 - Tarea 1 - Milena LópezDocumento3 páginasCuadro Sinóptico Ejercicio 1 - Tarea 1 - Milena LópezMARISODELLYS DOMINGUEZ100% (2)
- Test Final - Unidad 2 - Revisión Del Intento Modelamiento y SimulaciónDocumento4 páginasTest Final - Unidad 2 - Revisión Del Intento Modelamiento y SimulaciónNixon Arbey Velandia100% (1)
- Distribuciones probabilidad continuasDocumento92 páginasDistribuciones probabilidad continuasDaider Lara OrozcoAún no hay calificaciones
- 2010-1-2-Fcnm-Estadistica Descriptiva PDFDocumento2 páginas2010-1-2-Fcnm-Estadistica Descriptiva PDFAndrea RodriguezAún no hay calificaciones
- Deber 6Documento7 páginasDeber 6Felipe GuerraAún no hay calificaciones
- Prueba Ryan-Joiner Prueba Shappiro - WilkDocumento23 páginasPrueba Ryan-Joiner Prueba Shappiro - WilkrobertoAún no hay calificaciones
- ? Semana 09 - Tema 01 - Autoevaluación - Probabilidad Total y Teorema de Bayes - ESTADISTICA DESCRIPTIVA Y PROBABILIDADES (20488)Documento3 páginas? Semana 09 - Tema 01 - Autoevaluación - Probabilidad Total y Teorema de Bayes - ESTADISTICA DESCRIPTIVA Y PROBABILIDADES (20488)Rony Beyder Flores ReyesAún no hay calificaciones
- Mapa Conceptual ProbabilidadDocumento7 páginasMapa Conceptual ProbabilidadStella Andrade Diaz0% (1)
- Práctica # 2.1 - Estadistica Inferencial 25Documento3 páginasPráctica # 2.1 - Estadistica Inferencial 25maria paulino100% (3)
- TdistcontinuasDocumento3 páginasTdistcontinuaspaulaAún no hay calificaciones
- LR Exponencial PDFDocumento6 páginasLR Exponencial PDFFabrizio LópezAún no hay calificaciones
- Trabajo Grupal Final, Grupo Pss 17 Impresora 3DDocumento64 páginasTrabajo Grupal Final, Grupo Pss 17 Impresora 3DPeoto VallelinAún no hay calificaciones
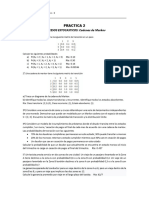
- Practica 2_Cadenas de MarkovDocumento5 páginasPractica 2_Cadenas de MarkovKevin MamaniAún no hay calificaciones
- Nicolas Loayza - Viernes Mañana (Proyecto Simulacion)Documento147 páginasNicolas Loayza - Viernes Mañana (Proyecto Simulacion)Mily Noemi Murga VasquezAún no hay calificaciones
- Distribución de probabilidad para contaminantes PM10 y CODocumento30 páginasDistribución de probabilidad para contaminantes PM10 y COBraulioMosqueraUribeAún no hay calificaciones
- Actividad de Aprendizaje 3 Ejercicios de Distribución de ProbabilidadesDocumento6 páginasActividad de Aprendizaje 3 Ejercicios de Distribución de Probabilidadeselmer villagranAún no hay calificaciones
- Notas de ProbaDocumento343 páginasNotas de ProbaJuan Manuel LópezAún no hay calificaciones
- Analiza tiempo operario montajeDocumento2 páginasAnaliza tiempo operario montajeSoniaAún no hay calificaciones
- Teorico ProbabilidadesDocumento7 páginasTeorico ProbabilidadesNúmero De OroAún no hay calificaciones
- Tipos de Distribuciones Estadísticas.Documento13 páginasTipos de Distribuciones Estadísticas.Jannelly MateoAún no hay calificaciones
- Distribuciones de Probabilidad y sus AplicacionesDocumento43 páginasDistribuciones de Probabilidad y sus AplicacionesAdrián Sánchez PérezAún no hay calificaciones
- Formulario 1Documento5 páginasFormulario 1FranciscaToledoAún no hay calificaciones
- Guia Easy FitDocumento16 páginasGuia Easy FitGerson RamírezAún no hay calificaciones
- Modulo 2 ProbabilidadesDocumento93 páginasModulo 2 ProbabilidadesRogger LlaczaAún no hay calificaciones