También podría gustarte
- Catedra Inv. Op TerminadaDocumento13 páginasCatedra Inv. Op TerminadaPatricio Salinas83% (6)
- Deber Final Estadistica ListoDocumento23 páginasDeber Final Estadistica ListoEsteban Flores Vega0% (2)
- Problemas ResueltosDocumento5 páginasProblemas ResueltosJeydi Tello50% (2)
- Tarea - 2 - Yesid ALfonso Sanchez - Grupo17Documento11 páginasTarea - 2 - Yesid ALfonso Sanchez - Grupo17KmiSz100% (1)
- Aplicacion de Limites de Una Funcion en La Economia orDocumento32 páginasAplicacion de Limites de Una Funcion en La Economia orJunet Elisa Aranya Vargas40% (5)
- Laboratorio 6 - Valeria López MDocumento5 páginasLaboratorio 6 - Valeria López MMaria Alejandra Gonzalez DuqueAún no hay calificaciones
- Parcial 1 - Inferencia - 2019 II (Solución)Documento4 páginasParcial 1 - Inferencia - 2019 II (Solución)Paula SeguraAún no hay calificaciones
- Métodos NuméricosDocumento76 páginasMétodos NuméricosRamirez Ramos Marie100% (2)
- Ejercicio 3.10 4.1 4.2 4.3 de Metodos Numericos para IngenierosDocumento8 páginasEjercicio 3.10 4.1 4.2 4.3 de Metodos Numericos para Ingenieroscesar daniel rojas chaconAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Notas de Clase Introduccion Al Analisis Real PDFDocumento61 páginasNotas de Clase Introduccion Al Analisis Real PDFdanielAún no hay calificaciones
- Grupo 2, MoliendaDocumento19 páginasGrupo 2, MoliendaJUNIOR CUARESMA HUAMANIAún no hay calificaciones
- Ma642 202002 Semana 12 Asíncrona Normal TeoríaDocumento6 páginasMa642 202002 Semana 12 Asíncrona Normal TeoríaMarlon GallegosAún no hay calificaciones
- LuisAlbertoMV A2 U2Documento6 páginasLuisAlbertoMV A2 U2AnonimoAún no hay calificaciones
- Aplicaciones A La Economia y A Los Negocios de A Integral DefinidaDocumento13 páginasAplicaciones A La Economia y A Los Negocios de A Integral DefinidaNatita RoblesAún no hay calificaciones
- Pauta Taller N°6 - Est 235 - Ii Sem 2021Documento3 páginasPauta Taller N°6 - Est 235 - Ii Sem 2021Elgran FinnAún no hay calificaciones
- Ejercicios Resueltos Regresion Lineal CabDocumento11 páginasEjercicios Resueltos Regresion Lineal CabCamilo Bustamante Santander75% (4)
- TALLER Nº3 Mateaplica2Documento11 páginasTALLER Nº3 Mateaplica2ronni bermudezAún no hay calificaciones
- Metodo de Punto FijoDocumento8 páginasMetodo de Punto FijoMarcelo Li ZavaletaAún no hay calificaciones
- Lunes 9-11 Movimiento en Dos Dimensiones InformeDocumento6 páginasLunes 9-11 Movimiento en Dos Dimensiones InformeJuliana ValenzuelaAún no hay calificaciones
- Campo Electrico 3Documento4 páginasCampo Electrico 3jose perezAún no hay calificaciones
- Propabilidad Producto 3 TerminadoDocumento7 páginasPropabilidad Producto 3 TerminadoJONATHAN PEREZ LOPEZAún no hay calificaciones
- Yohersa CatalogoDocumento7 páginasYohersa CatalogoAlex Huaranca100% (1)
- Informe VE FinalDocumento6 páginasInforme VE FinalAshley AgudeloAún no hay calificaciones
- Distribución NormalDocumento5 páginasDistribución NormalandreaAún no hay calificaciones
- Trabajo 4 UpnDocumento6 páginasTrabajo 4 UpnVanessa Moreno OrtizAún no hay calificaciones
- Problemas Resueltos de Interfases IpnDocumento7 páginasProblemas Resueltos de Interfases IpnBarrera JonathanAún no hay calificaciones
- Matemc3a1tica IpaeDocumento113 páginasMatemc3a1tica IpaeDiegoMendozaAún no hay calificaciones
- 301301A - 474 - Luis David Daza - Tarea 2.Documento11 páginas301301A - 474 - Luis David Daza - Tarea 2.Davo DassaAún no hay calificaciones
- Tarea 4 (Inev Regresión)Documento5 páginasTarea 4 (Inev Regresión)Sebastian AvilaAún no hay calificaciones
- Conversión Analógica A DigitalDocumento7 páginasConversión Analógica A DigitalAle KeyAún no hay calificaciones
- Funciones Comandos en MatlabDocumento11 páginasFunciones Comandos en MatlabwilmarfuerteAún no hay calificaciones
- Integrales DefinidasDocumento14 páginasIntegrales DefinidasC Alemán JhosuaAún no hay calificaciones
- Preguntas Errores Metodos NumericosDocumento5 páginasPreguntas Errores Metodos NumericosWendy Olín AcoAún no hay calificaciones
- SemanaDocumento25 páginasSemanaSegundo Artidoro Guerrero CiezaAún no hay calificaciones
- 42 - Santiago Hurtado Guerrero - Tarea 2 XDDocumento7 páginas42 - Santiago Hurtado Guerrero - Tarea 2 XDSantiago HurtadoAún no hay calificaciones
- 6 11Documento13 páginas6 11Fabricio CalapiñaAún no hay calificaciones
- Taller 3 Matematicas AplicadasDocumento12 páginasTaller 3 Matematicas Aplicadasricardo delacruzAún no hay calificaciones
- 301301-Maritza Miranda-Tarea2Documento13 páginas301301-Maritza Miranda-Tarea2Rosaisela Gutierrez MirandaAún no hay calificaciones
- Método UnamDocumento18 páginasMétodo UnamSolache DanielAún no hay calificaciones
- Problema N°5 - CimentacionesDocumento7 páginasProblema N°5 - CimentacionesWilber Arias BenitesAún no hay calificaciones
- Trabajo1 PaulaAlvearAcuñaDocumento9 páginasTrabajo1 PaulaAlvearAcuñaPaula AlvearAún no hay calificaciones
- Taller Calculo Inecuaciones Lineales Grado 11° SabadoDocumento8 páginasTaller Calculo Inecuaciones Lineales Grado 11° SabadoAleja Zuzu100% (1)
- 4 Ejercicios de Estadística InferencialDocumento11 páginas4 Ejercicios de Estadística InferencialedwardAún no hay calificaciones
- Muestreo Parte 2Documento8 páginasMuestreo Parte 2Martha IsteAún no hay calificaciones
- Propagacion de Errores (Estudiantes) PDFDocumento25 páginasPropagacion de Errores (Estudiantes) PDFAndrea Soraya DeudorAún no hay calificaciones
- GUIA DE FISICA #1 Estatica y Dinamica de Los FluidosDocumento34 páginasGUIA DE FISICA #1 Estatica y Dinamica de Los FluidosJoriel Felipe HerreraAún no hay calificaciones
- CE102 Libro Digital - Semana 6 - Función CuadráticaDocumento17 páginasCE102 Libro Digital - Semana 6 - Función CuadráticaPromocion 2018 TelecomunicacionesAún no hay calificaciones
- Ejercicios 19.sepDocumento13 páginasEjercicios 19.sepAndres Rejas De AchaAún no hay calificaciones
- Set 1Documento8 páginasSet 1Mark MoralesAún no hay calificaciones
- Diego RodriguezDocumento12 páginasDiego RodriguezDiego RodriguezAún no hay calificaciones
- Solucion Practica 2 - Et-Imii-2009Documento6 páginasSolucion Practica 2 - Et-Imii-2009sebastian100% (1)
- INFORME 2 (Terminado)Documento8 páginasINFORME 2 (Terminado)Ariana GrandeAún no hay calificaciones
- Formato Actividad No. 1 Módulo Iii Formato 2020Documento9 páginasFormato Actividad No. 1 Módulo Iii Formato 2020emmaAún no hay calificaciones
- Proyecto Calculo IDocumento5 páginasProyecto Calculo ILuis ValenciaAún no hay calificaciones
- LECCIÓN 2 SEP - SolucionDocumento5 páginasLECCIÓN 2 SEP - Solucionwalther lopez zhunioAún no hay calificaciones
- EjercicioDocumento11 páginasEjerciciojennyAún no hay calificaciones
- Evaluacion Final - Drenaje..Documento5 páginasEvaluacion Final - Drenaje..Sheyla Janina Huaman CervantesAún no hay calificaciones
- Informe de Laboratorio de Fis 200 Galvanometro TangenteDocumento6 páginasInforme de Laboratorio de Fis 200 Galvanometro TangenteManor CFAún no hay calificaciones
- Teoría de ControlDocumento15 páginasTeoría de ControlJorge Alonso DAún no hay calificaciones
- Detector de bordes astuto: Revelando el arte de la percepción visualDe EverandDetector de bordes astuto: Revelando el arte de la percepción visualAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- UntitledDocumento4 páginasUntitledHannia MartellAún no hay calificaciones
- Tarea 11Documento9 páginasTarea 11Hannia MartellAún no hay calificaciones
- Tarea 9Documento4 páginasTarea 9Hannia MartellAún no hay calificaciones
- Tarea 10Documento5 páginasTarea 10Hannia MartellAún no hay calificaciones
- Tarea 8Documento6 páginasTarea 8Hannia MartellAún no hay calificaciones
- Tarea 7Documento4 páginasTarea 7Hannia MartellAún no hay calificaciones
- Tarea 5Documento5 páginasTarea 5Hannia MartellAún no hay calificaciones
- Tarea 6Documento3 páginasTarea 6Hannia MartellAún no hay calificaciones
- Tarea 3Documento5 páginasTarea 3Hannia MartellAún no hay calificaciones
- Tarea 1Documento4 páginasTarea 1Hannia MartellAún no hay calificaciones
- Tarea 4Documento3 páginasTarea 4Hannia MartellAún no hay calificaciones
- Ordenamiento BúsquedaDocumento5 páginasOrdenamiento BúsquedaHannia MartellAún no hay calificaciones
- Tarea 2Documento6 páginasTarea 2Hannia MartellAún no hay calificaciones
- Anexo 1 - Tabla y Ejercicios Tarea 1Documento12 páginasAnexo 1 - Tabla y Ejercicios Tarea 1Maria Del Pilar Guarin Moreno Pilikguarinhotmail.comAún no hay calificaciones
- Guia de Estudios Colmilav MatematicaDocumento439 páginasGuia de Estudios Colmilav MatematicaFranklin sardonAún no hay calificaciones
- JacobianoDocumento5 páginasJacobianoRodrigo Montano BenedettiAún no hay calificaciones
- Preguntas de Primer Parcial - Cálculo Integral, 2020-03Documento1 páginaPreguntas de Primer Parcial - Cálculo Integral, 2020-03Laura Estefan Gómez AmayaAún no hay calificaciones
- Act 1 PresaberesDocumento5 páginasAct 1 PresaberesLuz MiryamAún no hay calificaciones
- Diop U1 A2 SevoDocumento8 páginasDiop U1 A2 SevoSergio VargasAún no hay calificaciones
- Ingles MatematicaDocumento6 páginasIngles MatematicaleomelthormeAún no hay calificaciones
- Tutoria Examen Calculo DifDocumento11 páginasTutoria Examen Calculo DifAnonymous 8fWEQH8OKMAún no hay calificaciones
- Conjunto Numérico - 2013Documento19 páginasConjunto Numérico - 2013leonpdf09Aún no hay calificaciones
- Transformada de Laplace-VI ModuloDocumento11 páginasTransformada de Laplace-VI ModuloDaniel AlejandroAún no hay calificaciones
- Análisis Matemático II - Sesión 2Documento22 páginasAnálisis Matemático II - Sesión 2Elvita ReyesAún no hay calificaciones
- Tarea 3 Calculo Integral John Alexander Chicaiza BORRADORDocumento13 páginasTarea 3 Calculo Integral John Alexander Chicaiza BORRADORJohn Alexander ChicaizaAún no hay calificaciones
- Control Analogo Unad 2019Documento14 páginasControl Analogo Unad 2019ManuelNarvaez100% (1)
- 05 Evaluacion Matesfracciones PDFDocumento2 páginas05 Evaluacion Matesfracciones PDFYolanda Bullón MartínAún no hay calificaciones
- S03.s1 - Material - Rectas Paralelas y PerpendicularesDocumento23 páginasS03.s1 - Material - Rectas Paralelas y PerpendicularesKatherin Herrera Tinco0% (2)
- Cálculo 3: SESIÓN 4: Diferencial Total y Regla de La CadenaDocumento26 páginasCálculo 3: SESIÓN 4: Diferencial Total y Regla de La CadenaMartin Rondan ValerioAún no hay calificaciones
- PolinomiosDocumento7 páginasPolinomiosdanielassum100% (1)
- Analisis de Contenido Sobre Los Números RacionalesDocumento11 páginasAnalisis de Contenido Sobre Los Números RacionalesMarGus Aguilar100% (1)
- Semana 2 7°Documento6 páginasSemana 2 7°Wilfredo Evelio Durán MejíaAún no hay calificaciones
- Ejercio Funcional PDFDocumento26 páginasEjercio Funcional PDFDitmar Sayritupac VenturaAún no hay calificaciones
- Coronel - Perez - Joel - Anderson - Ic - Semana 04 PDFDocumento4 páginasCoronel - Perez - Joel - Anderson - Ic - Semana 04 PDFAnderson Joel Coronel PerezAún no hay calificaciones
- Progresiones Arimc3a9ticas y Geomc3a9tricasDocumento11 páginasProgresiones Arimc3a9ticas y Geomc3a9tricasVALEFREY victor alegreAún no hay calificaciones
- Prueba de Ecuacion Cuadratica y Ecuacion IrracionalDocumento2 páginasPrueba de Ecuacion Cuadratica y Ecuacion IrracionalFabian Florëz100% (1)
- ESPINOZA IV A PDFDocumento164 páginasESPINOZA IV A PDFJORDY GAMERAún no hay calificaciones
- Ejercicios de Integrales Por SustitucionDocumento1 páginaEjercicios de Integrales Por SustitucionJOAN MARK COANQUI SOLISAún no hay calificaciones
- Tarea 10Documento7 páginasTarea 10Edgar SalazarAún no hay calificaciones
- Jornalización I BTPDocumento5 páginasJornalización I BTPLuis PerezAún no hay calificaciones
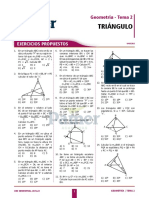
- Triángulo: Ejercicios PropuestosDocumento2 páginasTriángulo: Ejercicios Propuestosesteban nestor0% (1)