También podría gustarte
- Fundamentos Del Calculo - Asuc01110Documento2 páginasFundamentos Del Calculo - Asuc01110ROGER ANTONIO PRO JORDAN100% (1)
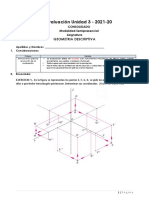
- Geometría descriptiva - Problemas de sistemas axonométricos y diédricosDocumento10 páginasGeometría descriptiva - Problemas de sistemas axonométricos y diédricosJOSE ANTONIO SAAVEDRA GUEVARAAún no hay calificaciones
- TrabajoFinal - 202210 - Unidad I y IIDocumento108 páginasTrabajoFinal - 202210 - Unidad I y IIKARLA CECILIA CASTRO CARPIOAún no hay calificaciones
- Examen Parcial 2022-1 SoluciónDocumento5 páginasExamen Parcial 2022-1 SoluciónjuanAún no hay calificaciones
- GEOMETRIADocumento9 páginasGEOMETRIARICARDO ARTURO CUBA QUISPE0% (1)
- Evaluación Dibujo IngenieríaDocumento5 páginasEvaluación Dibujo IngenieríaWILLIAM ALBERTO CAYCHO MALASQUEZAún no hay calificaciones
- Sol Evaluación Consolidado 1Documento5 páginasSol Evaluación Consolidado 1carlos cirineo uretaAún no hay calificaciones
- GeometriaDescriptiva - ExamenFinal 2022 IIDocumento6 páginasGeometriaDescriptiva - ExamenFinal 2022 IIEVELIN ESTHEYSIN JAVIER BUSICHAún no hay calificaciones
- Semana 13 s1Documento23 páginasSemana 13 s1REYMEL FLORENCIO CONDORI FERNANDEZAún no hay calificaciones
- EXAMEN PARCIAL XDDocumento5 páginasEXAMEN PARCIAL XDErick CondoriAún no hay calificaciones
- GeometriaDescriptiva ExamenFinalDocumento15 páginasGeometriaDescriptiva ExamenFinalJack Alania RojasAún no hay calificaciones
- Examen Parcial 2023-1Documento5 páginasExamen Parcial 2023-1Jair PuicónAún no hay calificaciones
- Eval Parcial - Fund - Cáculo - GQT - 2020-10 - A - TIPO - (C)Documento2 páginasEval Parcial - Fund - Cáculo - GQT - 2020-10 - A - TIPO - (C)Dageus Skoteinó IppótiAún no hay calificaciones
- 01 Consolidado 1Documento4 páginas01 Consolidado 1yaser takeshi curasma muñozAún no hay calificaciones
- Evalucià N ParcialDocumento3 páginasEvalucià N ParcialEdwin GutierrezAún no hay calificaciones
- Examen Final GD 2021-10 Tipo (B)Documento6 páginasExamen Final GD 2021-10 Tipo (B)Zman O.ZAún no hay calificaciones
- Práctica en Aula UnsaDocumento2 páginasPráctica en Aula UnsaEnrique Quispe CabanaAún no hay calificaciones
- Examen Parcial GDDocumento6 páginasExamen Parcial GDHuam Cas JhonatanAún no hay calificaciones
- ConsolidadoDocumento6 páginasConsolidadoERIK ANTONY VALENZUELA RICOAún no hay calificaciones
- Expresión Gráfica - Preguntas Test Bloque 3Documento3 páginasExpresión Gráfica - Preguntas Test Bloque 3christian eduardo cuadros portugal100% (1)
- Sistema de proyección axonométricaDocumento3 páginasSistema de proyección axonométricagilmar quispeAún no hay calificaciones
- Evaluación cuarta unidad de Geometría DescriptivaDocumento7 páginasEvaluación cuarta unidad de Geometría DescriptivaJefferson Perez ZeaAún no hay calificaciones
- Representaciones geométricas en el sistema diédricoDocumento46 páginasRepresentaciones geométricas en el sistema diédricoKevin QFAún no hay calificaciones
- Evaluación tercera unidad geometría descriptivaDocumento8 páginasEvaluación tercera unidad geometría descriptivaJefferson Perez ZeaAún no hay calificaciones
- Consolidado 2 Evaluación Semipresencial 2022 - 10aDocumento5 páginasConsolidado 2 Evaluación Semipresencial 2022 - 10aElvis Anchapuri TacoraAún no hay calificaciones
- GD - Evaluación de La UnidadDocumento5 páginasGD - Evaluación de La UnidadDageus Skoteinó Ippóti100% (1)
- Problemas de Geometría Descriptiva usando AutoCADDocumento28 páginasProblemas de Geometría Descriptiva usando AutoCADYISVETH LEA MONTES QUISPEAún no hay calificaciones
- Retroalimentación Actividad 04 SOLUCIONARIODocumento3 páginasRetroalimentación Actividad 04 SOLUCIONARIOJoel ChambillaAún no hay calificaciones
- PRODUCTO ACADÉMICO 02 - ResueltoDocumento5 páginasPRODUCTO ACADÉMICO 02 - ResueltoJosé UrdayAún no hay calificaciones
- Examen Parcial ADocumento6 páginasExamen Parcial AJefferson Perez ZeaAún no hay calificaciones
- Lab Geometria - 03Documento128 páginasLab Geometria - 03Abel PalaciosAún no hay calificaciones
- Evaluación Final Geometría Descriptiva 2021 problemas intersección planosDocumento4 páginasEvaluación Final Geometría Descriptiva 2021 problemas intersección planosJUANA TALIA LUCRECIA ESPINO GIBAJAAún no hay calificaciones
- Guias Laboratorio Virtual 1Documento8 páginasGuias Laboratorio Virtual 1James Edward Alarcon RamosAún no hay calificaciones
- Ex Parcial Tipo ADocumento6 páginasEx Parcial Tipo ASTEVE ALEX MANSILLA VIVAS100% (1)
- Unidad 2 Geometría Descriptiva (Práctica)Documento41 páginasUnidad 2 Geometría Descriptiva (Práctica)Ricardo Flores LazterosAún no hay calificaciones
- GeometriaDescriptiva - EValuacionSustitutoria 2022Documento9 páginasGeometriaDescriptiva - EValuacionSustitutoria 2022EVELIN ESTHEYSIN JAVIER BUSICHAún no hay calificaciones
- Geometria Descriptiva CRISTHIAN CASTRODocumento4 páginasGeometria Descriptiva CRISTHIAN CASTROCHRISTIAN EDUARDO CUADROS PORTUGAL100% (1)
- Pauta Solemne 3 Fundamentos 2015-1 PDFDocumento7 páginasPauta Solemne 3 Fundamentos 2015-1 PDFCatalina Del Villar PeñaililloAún no hay calificaciones
- Balotario de Ejercicios 1 PDFDocumento22 páginasBalotario de Ejercicios 1 PDFLewis HJAún no hay calificaciones
- EXAMEN PARCIAL Topografia 1Documento2 páginasEXAMEN PARCIAL Topografia 1Nitho BarronAún no hay calificaciones
- Evaluación de Geometría Descriptiva con 10 problemas de proyecciones axonométricasDocumento11 páginasEvaluación de Geometría Descriptiva con 10 problemas de proyecciones axonométricasBryan Flavio Mosquera Mendoza100% (1)
- Actividad de Aprendizajeb - Algebra Matricial y Geometria AnaliticaDocumento1 páginaActividad de Aprendizajeb - Algebra Matricial y Geometria AnaliticaKana Blanco Jorge Luis100% (1)
- La paráfrasis: tipos y ejemplosDocumento5 páginasLa paráfrasis: tipos y ejemplosAngela AltunaAún no hay calificaciones
- Foro Formativo 01 de Clenin Zapata CordovaDocumento1 páginaForo Formativo 01 de Clenin Zapata CordovaFidel Iván Sánchez HuamánAún no hay calificaciones
- Examen Final Geometria Descriptiva C PDFDocumento8 páginasExamen Final Geometria Descriptiva C PDFRONY QUISPE RAYAAún no hay calificaciones
- Ejercicios Sistema Axonométrico Geometría DescriptivaDocumento22 páginasEjercicios Sistema Axonométrico Geometría DescriptivaDIOMILA ADA ASENCIOS SHANQUETIAún no hay calificaciones
- 4 Balotario Unidad IIDocumento37 páginas4 Balotario Unidad IIJohan Fabricio Cana DavilaAún no hay calificaciones
- Autoevaluación N°4 - Revisión de IntentosDocumento4 páginasAutoevaluación N°4 - Revisión de Intentosgilmar quispeAún no hay calificaciones
- Semana 02 Practica 02Documento7 páginasSemana 02 Practica 02Brandn O.ZAún no hay calificaciones
- Examen Parcial GD 2021-10 TipoDocumento5 páginasExamen Parcial GD 2021-10 TipoKelvin Llantoy VallejosAún no hay calificaciones
- 4 Balotario Unidad IIIDocumento51 páginas4 Balotario Unidad IIIKENNY HAROLD CARMONA CHOQUEMAMANIAún no hay calificaciones
- Evaluacion de Consolidado 1 Matematica Discreta 2022Documento3 páginasEvaluacion de Consolidado 1 Matematica Discreta 2022venta examenesAún no hay calificaciones
- Evaluacion Final Geometria Descriptiva 1Documento3 páginasEvaluacion Final Geometria Descriptiva 1Kelvin Llantoy VallejosAún no hay calificaciones
- Bateria de Ejercicios Unidad II - UPCDocumento10 páginasBateria de Ejercicios Unidad II - UPCJUNIOR G GONZALES LUCAS0% (1)
- Sol Evaluación Consolidado 2Documento7 páginasSol Evaluación Consolidado 2carlos cirineo uretaAún no hay calificaciones
- Batería de Ejercicios Unidad IvDocumento22 páginasBatería de Ejercicios Unidad IvDIOMILA ADA ASENCIOS SHANQUETI50% (2)
- 2 EvaluacionDocumento6 páginas2 EvaluacionCELSO REYES OYOLAAún no hay calificaciones
- Actividad Virtual de Cálculo 4Documento2 páginasActividad Virtual de Cálculo 4Nicolas SanchezAún no hay calificaciones
- TrabajoFinal - 202210 - Unidad I y IIDocumento29 páginasTrabajoFinal - 202210 - Unidad I y IIJHOEL HUILLCA BARRIOSAún no hay calificaciones
- Clase 5 Siatema Axonometrico Ejerc 1Documento312 páginasClase 5 Siatema Axonometrico Ejerc 1Flavio Flores Coaguila100% (1)
- Boletin FinalDocumento3 páginasBoletin FinalZman O.ZAún no hay calificaciones
- Examen Final GD 2021-10 Tipo (B)Documento6 páginasExamen Final GD 2021-10 Tipo (B)Zman O.ZAún no hay calificaciones
- Formato de Planificación Del Discurso Expositivo OralDocumento3 páginasFormato de Planificación Del Discurso Expositivo OralZman O.ZAún no hay calificaciones
- Semana 10 Teoria Sesion 10Documento44 páginasSemana 10 Teoria Sesion 10Nilton Jinmy Escandón TorresAún no hay calificaciones
- Habilidades comunicativas boletínDocumento25 páginasHabilidades comunicativas boletínFrank FrankAún no hay calificaciones
- Semana 03 Teoria Sesion 03Documento75 páginasSemana 03 Teoria Sesion 03Zman O.ZAún no hay calificaciones
- Guía de Trabajo de Fundamentos de Cálculo-2021Documento61 páginasGuía de Trabajo de Fundamentos de Cálculo-2021Zman O.ZAún no hay calificaciones
- Semana 04 Teoria Sesion 04Documento49 páginasSemana 04 Teoria Sesion 04Zman O.ZAún no hay calificaciones
- Formato de Planificación Del Discurso Expositivo OralDocumento3 páginasFormato de Planificación Del Discurso Expositivo OralZman O.ZAún no hay calificaciones
- Escrito A Mano - 2021-09-03 - 183135Documento2 páginasEscrito A Mano - 2021-09-03 - 183135Zman O.ZAún no hay calificaciones
- Prueba Mixta de Comunicación Efectiva Unidad IiDocumento7 páginasPrueba Mixta de Comunicación Efectiva Unidad IiZman O.ZAún no hay calificaciones
- Hoja de Trabajo Semana 1 - Introducción de Estadística. 2022Documento3 páginasHoja de Trabajo Semana 1 - Introducción de Estadística. 2022Zman O.ZAún no hay calificaciones
- Hoja de Trabajo N°2Documento2 páginasHoja de Trabajo N°2Edu QuispeAún no hay calificaciones
- Corriente y Densidad de CorrienteDocumento24 páginasCorriente y Densidad de CorrienteHector Fimbres86% (21)
- Lacteos Bajo SinaiDocumento15 páginasLacteos Bajo SinaiJOSE. M.GAún no hay calificaciones
- Avance de MonografíaDocumento7 páginasAvance de Monografíalidia garcia huamanAún no hay calificaciones
- Sap Productivity PakDocumento45 páginasSap Productivity Pakisidoro71Aún no hay calificaciones
- Metrados Piscina JuntumaDocumento48 páginasMetrados Piscina JuntumaBladimir Huaman RAún no hay calificaciones
- Resumen Cap. 4 - Valor de EducarDocumento2 páginasResumen Cap. 4 - Valor de EducarEfrain Tesén FallaAún no hay calificaciones
- Ley de Ohm: Gráficas V=f(I) e I=f(V) que demuestran la relación directaDocumento7 páginasLey de Ohm: Gráficas V=f(I) e I=f(V) que demuestran la relación directaLUIS acaAún no hay calificaciones
- Adquisición yeso estadio UrubambaDocumento4 páginasAdquisición yeso estadio UrubambaSharon LeivaAún no hay calificaciones
- Instalacion IDE AnacondaDocumento6 páginasInstalacion IDE AnacondaMario ParedesAún no hay calificaciones
- Disertación PraatDocumento23 páginasDisertación PraatDani100% (1)
- 2 Area Central-Area Monumental-Centro HistoricoDocumento14 páginas2 Area Central-Area Monumental-Centro HistoricoLourdes BordaAún no hay calificaciones
- Christensen - Como Evaluara Su VidaDocumento7 páginasChristensen - Como Evaluara Su VidaJosué Barrantes0% (1)
- Energias Alternativas en BoliviaDocumento22 páginasEnergias Alternativas en BoliviamorelbaAún no hay calificaciones
- Fisica Hoja de Trabajo 01 - Método CientíficoDocumento4 páginasFisica Hoja de Trabajo 01 - Método CientíficoBrandon RodriguezAún no hay calificaciones
- Catálogo recambios People GTi 125Documento133 páginasCatálogo recambios People GTi 125IBONAún no hay calificaciones
- MATEMÁTICADocumento5 páginasMATEMÁTICADuver Arley Bermúdez OspinaAún no hay calificaciones
- Practica #1 A.V.TDocumento3 páginasPractica #1 A.V.TJuan LaurenteAún no hay calificaciones
- Reporte SemanalDocumento18 páginasReporte SemanalFabrizio NegliAún no hay calificaciones
- Preguntas Sobre El Documental BarakaDocumento5 páginasPreguntas Sobre El Documental BarakaMaria Paula Gutierrez Jacobo0% (1)
- Fundamentos de Ingeniería de Yacimientos - Magdalena Paris de FerrerDocumento588 páginasFundamentos de Ingeniería de Yacimientos - Magdalena Paris de FerrerSteven Barreto96% (28)
- Foro Temático Del Curso - FR1 PDFDocumento3 páginasForo Temático Del Curso - FR1 PDFEsteban Fernandez VasquezAún no hay calificaciones
- TPC 2020 Arquitectura de ComputadoresDocumento8 páginasTPC 2020 Arquitectura de ComputadoresLcdo. German A. Salas OjedaAún no hay calificaciones
- Incubadoras de empresas universitariasDocumento21 páginasIncubadoras de empresas universitariasluz huamani gavinoAún no hay calificaciones
- NTC2348Documento33 páginasNTC2348Hernando Jerez FuentesAún no hay calificaciones
- Caracteristicas de Las Metas Bien PlanteadasDocumento1 páginaCaracteristicas de Las Metas Bien PlanteadasAlexandra Gallego Lopera100% (1)
- Tarea 6 Parte 2de EstadisticaDocumento4 páginasTarea 6 Parte 2de EstadisticaJuana María Acosta AbreuAún no hay calificaciones
- ORÍGENES DE LA MEDICIÓNDocumento5 páginasORÍGENES DE LA MEDICIÓNDavid Fernando Gaitan LeonAún no hay calificaciones
- ReinventarseDocumento12 páginasReinventarseTara JohnsonAún no hay calificaciones
- CLASE 4 - Unidad 4 2014EIADocumento9 páginasCLASE 4 - Unidad 4 2014EIAMichelleHerberAún no hay calificaciones
- Estrategia de Servicio.Documento4 páginasEstrategia de Servicio.jorge antonio aguilar valienteAún no hay calificaciones
- Lecciones de dibujo (Cuaderno temático No. 5)De EverandLecciones de dibujo (Cuaderno temático No. 5)Calificación: 4 de 5 estrellas4/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Miniguías Parramón: Comprender la perspectivaDe EverandMiniguías Parramón: Comprender la perspectivaCalificación: 5 de 5 estrellas5/5 (13)
- Cabeza y retrato: Método para aprender, dominar y disfrutar los secretos del dibujo y la pinturaDe EverandCabeza y retrato: Método para aprender, dominar y disfrutar los secretos del dibujo y la pinturaCalificación: 4.5 de 5 estrellas4.5/5 (6)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Dibujo: Método para aprender, dominar y disfrutar los secretos del dibujo y la pinturaDe EverandDibujo: Método para aprender, dominar y disfrutar los secretos del dibujo y la pinturaCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Garabatos: Cómo dominar el garabateo en 6 sencillos pasosDe EverandGarabatos: Cómo dominar el garabateo en 6 sencillos pasosCalificación: 3.5 de 5 estrellas3.5/5 (4)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Manuales Parramón: Mezcla de colores: 1: AcuarelaDe EverandManuales Parramón: Mezcla de colores: 1: AcuarelaCalificación: 5 de 5 estrellas5/5 (12)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoDe EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoCalificación: 4.5 de 5 estrellas4.5/5 (9)