También podría gustarte
- Instalaciones de DistribucionDocumento21 páginasInstalaciones de DistribucionSanty Molina0% (1)
- Montaje de cuadros de control y dispositivos eléctricos y electrónicos de sistemas domóticoDe EverandMontaje de cuadros de control y dispositivos eléctricos y electrónicos de sistemas domóticoAún no hay calificaciones
- ComunicaDocumento23 páginasComunicaSergio Quisbert P.Aún no hay calificaciones
- HJSJHDDocumento96 páginasHJSJHDJuanAún no hay calificaciones
- Ayudante Inst Electrotecnicas y de Comunicacion Cuaderno de Actividades PDFDocumento206 páginasAyudante Inst Electrotecnicas y de Comunicacion Cuaderno de Actividades PDFIrvis Eduardo100% (1)
- SISCOMEVUDocumento299 páginasSISCOMEVUJuan100% (5)
- HsdghfsDocumento396 páginasHsdghfsJuan100% (1)
- Desarrollo de Sistemas de Medida y RegulaciónDocumento147 páginasDesarrollo de Sistemas de Medida y RegulaciónDani PerezAún no hay calificaciones
- Cap 01 DefwebDocumento25 páginasCap 01 DefwebYomin KatuongoAún no hay calificaciones
- FESTO LAB NeumaticaDocumento11 páginasFESTO LAB NeumaticaJhuly AnaAún no hay calificaciones
- Itc-Bt 28Documento44 páginasItc-Bt 28pintorentoAún no hay calificaciones
- Circuitos Básicos de Ciclos Neumáticos y Electroneumáticos - José Manuel GeaDocumento162 páginasCircuitos Básicos de Ciclos Neumáticos y Electroneumáticos - José Manuel GeaABRAHAM SOTO RODRÍGUEZ100% (1)
- Cap 08 DefwebDocumento9 páginasCap 08 DefwebYomin KatuongoAún no hay calificaciones
- Ejemplo Hmi OmronDocumento124 páginasEjemplo Hmi OmronJaime Fernandez100% (1)
- (Guia Didactica Automatismos Industriales) RVDocumento43 páginas(Guia Didactica Automatismos Industriales) RVJairo arias arizaAún no hay calificaciones
- Gestión montaje automatizaciónDocumento6 páginasGestión montaje automatizaciónFernando CabreraAún no hay calificaciones
- Practicas Rele ProgramableDocumento48 páginasPracticas Rele Programablehanner90Aún no hay calificaciones
- Medida deformación galgas extensométricasDocumento41 páginasMedida deformación galgas extensométricasManuel Vázquez RodríguezAún no hay calificaciones
- Control de Sistemas Neumaticos y Electroneumaticos - Roni DominguezDocumento231 páginasControl de Sistemas Neumaticos y Electroneumaticos - Roni DominguezRoberto Elias Hermenegildo TaboadaAún no hay calificaciones
- Senh 3Documento96 páginasSenh 3cmochoAún no hay calificaciones
- LIBRO Aulaelectricacom AYUDANTE-INST-ELECTROTECNICAS-Y-DE-COMUNICACION-GUIA-PROFESOR PDFDocumento116 páginasLIBRO Aulaelectricacom AYUDANTE-INST-ELECTROTECNICAS-Y-DE-COMUNICACION-GUIA-PROFESOR PDFEnrique Martinez100% (4)
- MEEI AI Tema 4 PDFDocumento60 páginasMEEI AI Tema 4 PDFVATEKAún no hay calificaciones
- 1-Medidas y Errores de MediciónDocumento10 páginas1-Medidas y Errores de Mediciónandrea alvarez perezAún no hay calificaciones
- 3 Cuadros eléctricos: Componentes y conexionesDocumento61 páginas3 Cuadros eléctricos: Componentes y conexionesVATEKAún no hay calificaciones
- KFLDJLKDocumento138 páginasKFLDJLKJuanAún no hay calificaciones
- Senh 2Documento187 páginasSenh 2cmochoAún no hay calificaciones
- Cómo Programar Step 7 y No Morir en El Intento V2015 - 02 - DEMO PDFDocumento28 páginasCómo Programar Step 7 y No Morir en El Intento V2015 - 02 - DEMO PDFBalmer Jhoan Diaz ÁlvarezAún no hay calificaciones
- KLJGDLJLDFKIDGDocumento130 páginasKLJGDLJLDFKIDGJuanAún no hay calificaciones
- Circuitos Basicos de Ciclos Neumaticos y ElectroneumaticosDocumento174 páginasCircuitos Basicos de Ciclos Neumaticos y Electroneumaticosjuan diazAún no hay calificaciones
- HytipoDocumento331 páginasHytipoJuan100% (1)
- Solucionario Dic2021Documento19 páginasSolucionario Dic2021vicenteAún no hay calificaciones
- Libro PLC Nivel Basico Tp301 Festo Manual de Trabajo 2000Documento457 páginasLibro PLC Nivel Basico Tp301 Festo Manual de Trabajo 2000masterloboAún no hay calificaciones
- Montaje y Mecanizado de Cuadros EléctricosDocumento55 páginasMontaje y Mecanizado de Cuadros Eléctricosangelmejias67% (3)
- HFIMDLPOSHJDocumento316 páginasHFIMDLPOSHJJuanAún no hay calificaciones
- Instalaciones Neumã¡ticas PDFDocumento117 páginasInstalaciones Neumã¡ticas PDFYtzhak AvilaAún no hay calificaciones
- Explicacion de La Practica Publica ConcurrenciaDocumento15 páginasExplicacion de La Practica Publica ConcurrenciaMaria planeller100% (1)
- AnA!lisis Pra!ctico de Circuito - Redondo Gallardo, JosA (C) MarAa PDFDocumento116 páginasAnA!lisis Pra!ctico de Circuito - Redondo Gallardo, JosA (C) MarAa PDFgatuso123100% (1)
- Tecnicas de Instalaciones Electricas - Pdf-NeneDocumento92 páginasTecnicas de Instalaciones Electricas - Pdf-NenepelypelyAún no hay calificaciones
- Automatizacion - Problemas Resueltos Con Automatas Programables-J. Pedro RomeraDocumento310 páginasAutomatizacion - Problemas Resueltos Con Automatas Programables-J. Pedro Romerajsantos_217Aún no hay calificaciones
- Turbinas y Compresores de Gas - Gil AO 2015Documento605 páginasTurbinas y Compresores de Gas - Gil AO 2015John Edison VallejoAún no hay calificaciones
- Libro ElectricidadDocumento296 páginasLibro ElectricidadISAI GARCIA GONZALEZAún no hay calificaciones
- Curso Autómatas Programables s7200Documento105 páginasCurso Autómatas Programables s7200gemomarAún no hay calificaciones
- Iei Cuaderno PracticasDocumento69 páginasIei Cuaderno Practicasvalquiria_13Aún no hay calificaciones
- ERGUTYOPIUDocumento201 páginasERGUTYOPIUJuanAún no hay calificaciones
- Manual PLC General-IEEE PDFDocumento229 páginasManual PLC General-IEEE PDFDamian100% (1)
- Archivo 01Documento6 páginasArchivo 01cacordova70Aún no hay calificaciones
- Tableros y Cuadros ElectricosDocumento215 páginasTableros y Cuadros ElectricoscesarthemaxAún no hay calificaciones
- HUPOLEDUITDocumento144 páginasHUPOLEDUITJuan100% (2)
- Editex SolucionarioDocumento51 páginasEditex SolucionarioJavier Baltasar Ramos50% (2)
- Comunicacion ModbusDocumento155 páginasComunicacion ModbusRodolfoAntonioLeónCárdenasAún no hay calificaciones
- OIURETDocumento70 páginasOIURETJuanAún no hay calificaciones
- Infraestructuras de Telecomunicaciones en ViviendasDocumento25 páginasInfraestructuras de Telecomunicaciones en Viviendassmunoz443x9066Aún no hay calificaciones
- Tia PortalDocumento20 páginasTia PortalAdeilson PereiraAún no hay calificaciones
- Paraninfo Catalogo General 2011Documento82 páginasParaninfo Catalogo General 2011José GalisteoAún no hay calificaciones
- Controles Logicos ProgramablesDocumento593 páginasControles Logicos ProgramablesGerman Bello PeraltaAún no hay calificaciones
- KJDFHGDocumento58 páginasKJDFHGJuanAún no hay calificaciones
- Doku - Pub Instalaciones Electricas Interiores EditexDocumento363 páginasDoku - Pub Instalaciones Electricas Interiores EditexMoreno OrellanaAún no hay calificaciones
- MEEI AI Tema 1 PDFDocumento18 páginasMEEI AI Tema 1 PDFVATEKAún no hay calificaciones
- GKLDFKJLKJHDFSHDocumento382 páginasGKLDFKJLKJHDFSHJuan100% (3)
- ZAVIC Hoja RespuestasDocumento1 páginaZAVIC Hoja Respuestasosman choque rojasAún no hay calificaciones
- Examen de Maria IsabelDocumento2 páginasExamen de Maria Isabelosman choque rojasAún no hay calificaciones
- GWP Brochure 2022 SpanishDocumento38 páginasGWP Brochure 2022 Spanishosman choque rojasAún no hay calificaciones
- Trucos Aportados Al Juego Por Los Usuarios de Trucoteca Color Me Stupid COLOR ME STUPIDDocumento2 páginasTrucos Aportados Al Juego Por Los Usuarios de Trucoteca Color Me Stupid COLOR ME STUPIDosman choque rojasAún no hay calificaciones
- Test-Dominos-48d-Xls - CorreoDocumento17 páginasTest-Dominos-48d-Xls - Correoosman choque rojasAún no hay calificaciones
- Manual GrafcetDocumento15 páginasManual Grafcetosman choque rojas100% (1)
- Test-Dominos-48d-Xls - CorreoDocumento17 páginasTest-Dominos-48d-Xls - Correoosman choque rojasAún no hay calificaciones
- Manual Del Usuario de MikroPLAN - 2021 - 18Documento348 páginasManual Del Usuario de MikroPLAN - 2021 - 18osman choque rojasAún no hay calificaciones
- 16 PF - Hoja de RespuestaDocumento41 páginas16 PF - Hoja de Respuestaosman choque rojasAún no hay calificaciones
- Maquina Bloquera Semi-AutomaticaDocumento81 páginasMaquina Bloquera Semi-Automaticaosman choque rojasAún no hay calificaciones
- Diseno e Implementacion de Herramientas para Automatas Programables Desarrolladas en Sistemas AndroidDocumento108 páginasDiseno e Implementacion de Herramientas para Automatas Programables Desarrolladas en Sistemas Androidosman choque rojasAún no hay calificaciones
- Diseno e Implementacion de Herramientas para Automatas Programables Desarrolladas en Sistemas AndroidDocumento108 páginasDiseno e Implementacion de Herramientas para Automatas Programables Desarrolladas en Sistemas Androidosman choque rojasAún no hay calificaciones
- Maquinaria para LácteosDocumento36 páginasMaquinaria para LácteosVSmithAún no hay calificaciones
- Sistemas para La AutomatizaciónDocumento12 páginasSistemas para La Automatizaciónosman choque rojasAún no hay calificaciones
- Ups GT000134 PDFDocumento143 páginasUps GT000134 PDFEduardo PazmiñoAún no hay calificaciones
- Mantenimiento PreventivoDocumento1 páginaMantenimiento Preventivoosman choque rojasAún no hay calificaciones
- Ups GT000134 PDFDocumento143 páginasUps GT000134 PDFEduardo PazmiñoAún no hay calificaciones
- Licor de FresaDocumento14 páginasLicor de Fresaosman choque rojas100% (1)
- Ups GT000134 PDFDocumento143 páginasUps GT000134 PDFEduardo PazmiñoAún no hay calificaciones
- Licor de FresaDocumento14 páginasLicor de Fresaosman choque rojas100% (1)
- Manual de Conservas-Inta-1 ParteDocumento23 páginasManual de Conservas-Inta-1 Partevefers100% (9)
- Obtención integral de aceite esencial y pectina de cáscara de naranjaDocumento17 páginasObtención integral de aceite esencial y pectina de cáscara de naranjaosman choque rojasAún no hay calificaciones
- Perfil Extracción y Caracterización El Aceite de Semillas de Naranja Colectadas en Expendios Ambulantes de JugosDocumento7 páginasPerfil Extracción y Caracterización El Aceite de Semillas de Naranja Colectadas en Expendios Ambulantes de Jugososman choque rojasAún no hay calificaciones
- Perfil Extracción y Caracterización El Aceite de Semillas de Naranja Colectadas en Expendios Ambulantes de JugosDocumento7 páginasPerfil Extracción y Caracterización El Aceite de Semillas de Naranja Colectadas en Expendios Ambulantes de Jugososman choque rojasAún no hay calificaciones
- Formatos Ecuador ProyectosDocumento5 páginasFormatos Ecuador ProyectosJuan LOAún no hay calificaciones
- Perfil Extracción y Caracterización El Aceite de Semillas de Naranja Colectadas en Expendios Ambulantes de JugosDocumento7 páginasPerfil Extracción y Caracterización El Aceite de Semillas de Naranja Colectadas en Expendios Ambulantes de Jugososman choque rojasAún no hay calificaciones
- E 10340 EIA0 Olavarria 0 V 10Documento99 páginasE 10340 EIA0 Olavarria 0 V 10Leonardo Pariona FloresAún no hay calificaciones
- E 10340 EIA0 Olavarria 0 V 10Documento99 páginasE 10340 EIA0 Olavarria 0 V 10Leonardo Pariona FloresAún no hay calificaciones
- Dialnet ModeloDelControlDeNivelYCaudalDeLiquidoEnUnDeposit 4762998 PDFDocumento7 páginasDialnet ModeloDelControlDeNivelYCaudalDeLiquidoEnUnDeposit 4762998 PDFHelyson PerdomoAún no hay calificaciones
- Las Particiones GPTDocumento2 páginasLas Particiones GPTJuan Carlos Ramirez FuentesAún no hay calificaciones
- La Ciberseguridad Es La Práctica de Defender Las ComputadorasDocumento3 páginasLa Ciberseguridad Es La Práctica de Defender Las ComputadorasJHIRLEY DANIELA ROJAS PE?AAún no hay calificaciones
- Cuadro Comparativo de Arquitectura de SoftwareDocumento3 páginasCuadro Comparativo de Arquitectura de SoftwareFernando TrejoAún no hay calificaciones
- Tema 10 - HTML - JavaScriptDocumento65 páginasTema 10 - HTML - JavaScriptSofía AriasAún no hay calificaciones
- Desarrollo Adaptativo de SoftwareDocumento10 páginasDesarrollo Adaptativo de SoftwarePdroLeonaroAún no hay calificaciones
- Normas Informáticas Internas Que Se Deben Aplicar en UnaDocumento8 páginasNormas Informáticas Internas Que Se Deben Aplicar en UnaEvelyn Urcia QuintanillaAún no hay calificaciones
- Configuración Punto Acceso EquipoDocumento27 páginasConfiguración Punto Acceso EquipoitzelAún no hay calificaciones
- Fase2 - Gabriel ArdilaDocumento5 páginasFase2 - Gabriel ArdilaGabriel AridlaAún no hay calificaciones
- Sesion 01 - Seguridad en Redes de Comunicacion - TeoriaDocumento11 páginasSesion 01 - Seguridad en Redes de Comunicacion - TeoriaBlanca Calisaya MaqueraAún no hay calificaciones
- Guia Plan de Gestión de ProyectoDocumento15 páginasGuia Plan de Gestión de ProyectokariAún no hay calificaciones
- Android ViewModels guíaDocumento30 páginasAndroid ViewModels guíavictororueAún no hay calificaciones
- WirelessAccesPoint ScalanceDocumento51 páginasWirelessAccesPoint Scalanceisaias martinezAún no hay calificaciones
- VLSM Paso A PasoDocumento4 páginasVLSM Paso A PasoAaron JarabranAún no hay calificaciones
- Investigación Sobre Automatización de Subestaciones Mediante El Uso de IEDSDocumento31 páginasInvestigación Sobre Automatización de Subestaciones Mediante El Uso de IEDSMAURICIO SANTIBANEZ ROJASAún no hay calificaciones
- Capítulo 7 - EstructurasDocumento13 páginasCapítulo 7 - EstructurasartmatorAún no hay calificaciones
- INFORMATICADocumento25 páginasINFORMATICAedwardrugelesAún no hay calificaciones
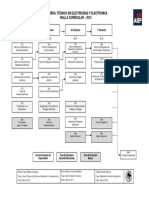
- Malla Curricular-Técnico en Electricidad y Electrónica-2013 (2016)Documento1 páginaMalla Curricular-Técnico en Electricidad y Electrónica-2013 (2016)cuenta forniteAún no hay calificaciones
- CapacitorDocumento12 páginasCapacitorHernan flores ramirezAún no hay calificaciones
- ASIGNATURA: Tecnología de La Información TUTOR: MC Alejandro Alatorre NOMBRE: Marcela Carolina Galván Dávila MATRÍCULA: 27770Documento10 páginasASIGNATURA: Tecnología de La Información TUTOR: MC Alejandro Alatorre NOMBRE: Marcela Carolina Galván Dávila MATRÍCULA: 27770Carolina GalvánAún no hay calificaciones
- Semana 12 Y 13 Informática 3ro BT CostaDocumento41 páginasSemana 12 Y 13 Informática 3ro BT CostaGyuri CaimAún no hay calificaciones
- Memoria Descriptiva Procesos Productivos Generación de Residuos PeligrososDocumento24 páginasMemoria Descriptiva Procesos Productivos Generación de Residuos PeligrososBastián Salvador BotelloAún no hay calificaciones
- ENIAC y UNIVACDocumento5 páginasENIAC y UNIVACTico ChavelasAún no hay calificaciones
- Informe Carga y Stress IODocumento12 páginasInforme Carga y Stress IOLuisa PerezAún no hay calificaciones
- Taller Semana 6 ConfiabilidadDocumento3 páginasTaller Semana 6 ConfiabilidadSebastián0% (2)
- Programacion Orientada A Objetos-Sergio Augusto Cardona TorresDocumento226 páginasProgramacion Orientada A Objetos-Sergio Augusto Cardona TorresFrancis DrakeAún no hay calificaciones
- Aspire 5 A515 56 5795 2Documento2 páginasAspire 5 A515 56 5795 2Diego Sandoval FernandezAún no hay calificaciones
- ProgramacionDocumento5 páginasProgramacionDairita Castillo CueroAún no hay calificaciones
- Implementación de conectividad básicaDocumento21 páginasImplementación de conectividad básicaCoor. Infraestructura - Daniel SuarezAún no hay calificaciones
- 06.2 Gestión de MaterialesDocumento11 páginas06.2 Gestión de MaterialesMauroAún no hay calificaciones
- Taller7 PensamientocomputacionalDocumento3 páginasTaller7 PensamientocomputacionalIroka María Martìnez Vence0% (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (116)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Resumen de El cuadro de mando integral paso a paso de Paul R. NivenDe EverandResumen de El cuadro de mando integral paso a paso de Paul R. NivenCalificación: 5 de 5 estrellas5/5 (2)
- Estructuras de Datos Básicas: Programación orientada a objetos con JavaDe EverandEstructuras de Datos Básicas: Programación orientada a objetos con JavaCalificación: 5 de 5 estrellas5/5 (1)
- Minería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásDe EverandMinería de Datos: Guía de Minería de Datos para Principiantes, que Incluye Aplicaciones para Negocios, Técnicas de Minería de Datos, Conceptos y MásCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Investigación de operaciones: Conceptos fundamentalesDe EverandInvestigación de operaciones: Conceptos fundamentalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Auditoría de seguridad informática: Curso prácticoDe EverandAuditoría de seguridad informática: Curso prácticoCalificación: 5 de 5 estrellas5/5 (1)
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- ChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...De EverandChatGPT Ganar Dinero Desde Casa Nunca fue tan Fácil Las 7 mejores fuentes de ingresos pasivos con Inteligencia Artificial (IA): libros, redes sociales, marketing digital, programación...Calificación: 5 de 5 estrellas5/5 (4)
- El trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoDe EverandEl trading online de una forma sencilla: Cómo convertirse en un inversionista online y descubrir las bases para lograr un trading de éxitoCalificación: 4 de 5 estrellas4/5 (30)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- La biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetDe EverandLa biblia del e-commerce: Los secretos de la venta online. Más de mil ideas para vender por internetCalificación: 5 de 5 estrellas5/5 (7)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)
- Aprender Illustrator 2020 con 100 ejercicios prácticosDe EverandAprender Illustrator 2020 con 100 ejercicios prácticosAún no hay calificaciones
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Gestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosDe EverandGestión de Proyectos con Microsoft Project 2013: Software de gestión de proyectosCalificación: 5 de 5 estrellas5/5 (3)
- Organizaciones Exponenciales: Por qué existen nuevas organizaciones diez veces más escalables y rentables que la tuya (y qué puedes hacer al respecto)De EverandOrganizaciones Exponenciales: Por qué existen nuevas organizaciones diez veces más escalables y rentables que la tuya (y qué puedes hacer al respecto)Calificación: 4.5 de 5 estrellas4.5/5 (11)
- AngularJS: Conviértete en el profesional que las compañías de software necesitan.De EverandAngularJS: Conviértete en el profesional que las compañías de software necesitan.Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)