También podría gustarte
- Problemas 04 CPMDocumento22 páginasProblemas 04 CPMAndres AdrianAún no hay calificaciones
- Geometría 5toDocumento1 páginaGeometría 5toJosé Carlos Torres VarillasAún no hay calificaciones
- Ejercicios ArpegiosDocumento3 páginasEjercicios Arpegiosjesus arbey100% (1)
- Resumen Completo de PsicometriaDocumento33 páginasResumen Completo de PsicometriaJaneth SoMaAún no hay calificaciones
- Solucion de Problemas de Ingenieria Con MatlabDocumento352 páginasSolucion de Problemas de Ingenieria Con Matlabalverick18100% (2)
- Cielito Lindo-2021Documento3 páginasCielito Lindo-2021Juan Calvo Sanz100% (1)
- Capitulo 15Documento30 páginasCapitulo 15Hrodriguez Rodriguez88% (16)
- Portico 1Documento15 páginasPortico 1LucianaAún no hay calificaciones
- Mathcad - Parrilla Sistematizado - ClaseDocumento11 páginasMathcad - Parrilla Sistematizado - ClaseDREWAún no hay calificaciones
- Soluciòn Del Onceavo Capítulo de Anàlisis Estructural IiDocumento26 páginasSoluciòn Del Onceavo Capítulo de Anàlisis Estructural IiLUis GuiLlermo GambOa ContreRasAún no hay calificaciones
- Caso Semana 7 Iea1Documento2 páginasCaso Semana 7 Iea1Lissa AbiheylAún no hay calificaciones
- Fdocuments - Ec - Solucion Del Onceavo Capitulo de Analisis Estructural IidocxDocumento29 páginasFdocuments - Ec - Solucion Del Onceavo Capitulo de Analisis Estructural IidocxHJ Mīguel ÂngelAún no hay calificaciones
- PLC Ejemplos 2022Documento35 páginasPLC Ejemplos 2022Daniel CamposAún no hay calificaciones
- Informe Digital Lab 6Documento9 páginasInforme Digital Lab 6Marco Calizaya MartinezAún no hay calificaciones
- CONTADORESDocumento17 páginasCONTADORESEnrique Diaz RubioAún no hay calificaciones
- Pasional GuitarraDocumento3 páginasPasional GuitarraRoberto Loya100% (1)
- Malagueña de LecuonaDocumento1 páginaMalagueña de LecuonaDaniel Madrid0% (1)
- 2 - Solucionario Primer Parcial - Ii 2022Documento6 páginas2 - Solucionario Primer Parcial - Ii 2022Iquisi YhesicaAún no hay calificaciones
- Intro Maria La PortuguesaDocumento1 páginaIntro Maria La PortuguesaTere MoyanoAún no hay calificaciones
- Búsquedas Por Residuos PDFDocumento19 páginasBúsquedas Por Residuos PDFJULIAN DAVID RINCON CASTROAún no hay calificaciones
- Practica 2Documento2 páginasPractica 2elolles trupAún no hay calificaciones
- Ejemplo de Procedimiento-Estructura-1Documento8 páginasEjemplo de Procedimiento-Estructura-1matiasAún no hay calificaciones
- Diagramas de Circuitos SELLADORA-1-NEUMATICA-OrDENADADocumento1 páginaDiagramas de Circuitos SELLADORA-1-NEUMATICA-OrDENADAJulio E Inga GAún no hay calificaciones
- Met Rig Mco-ArmaDocumento4 páginasMet Rig Mco-ArmaAriel MitreAún no hay calificaciones
- Banjo Tabs 2Documento1 páginaBanjo Tabs 2Juan Marcos ParedesAún no hay calificaciones
- Unidad 5Documento28 páginasUnidad 5jean kenyonAún no hay calificaciones
- Problema Base Matricial Nudos ArticuladosDocumento4 páginasProblema Base Matricial Nudos ArticuladosmiguelAún no hay calificaciones
- Rigideces PDFDocumento24 páginasRigideces PDFrodolfo CISNEROS MENDOZAAún no hay calificaciones
- Anexo - Estudio de Clasificacion VehicularDocumento11 páginasAnexo - Estudio de Clasificacion VehicularQuispe Ccasa FredylinAún no hay calificaciones
- 1er PARCIAL MEC 3333Documento9 páginas1er PARCIAL MEC 3333David Felipe GabrielAún no hay calificaciones
- Aforo VehicularDocumento25 páginasAforo VehicularHERBERT JESUS ZEVALLOS GUZMANAún no hay calificaciones
- Tarea 3.5)Documento6 páginasTarea 3.5)Marcos Robert Pierre Pérez SoberanisAún no hay calificaciones
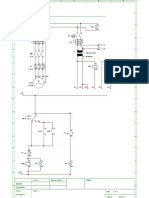
- Arranque EstrellaDocumento1 páginaArranque EstrellaSanto Domingo de GuzmanAún no hay calificaciones
- Ficha de Evaluación de Riesgo VocalDocumento1 páginaFicha de Evaluación de Riesgo VocalSergio Enrique Di MarioAún no hay calificaciones
- Resolución Examen Parcial-Mc - M-301-Qm - Q-308 - Marzo 13Documento3 páginasResolución Examen Parcial-Mc - M-301-Qm - Q-308 - Marzo 13Elena VAún no hay calificaciones
- PLC 1 Ro 400Documento1 páginaPLC 1 Ro 400Romel Ccarhuas CarrascoAún no hay calificaciones
- Semana7RyT PDFDocumento6 páginasSemana7RyT PDFAlejandro AlvarezAún no hay calificaciones
- Tarea 3.1)Documento5 páginasTarea 3.1)Marcos Robert Pierre Pérez SoberanisAún no hay calificaciones
- Cuarentena NotasDocumento18 páginasCuarentena NotasLiliana EspinozaAún no hay calificaciones
- Capitulo 11.8 Analisis MatricialDocumento13 páginasCapitulo 11.8 Analisis MatricialFrancisco LuceroAún no hay calificaciones
- Ejercicio de ArpegiosDocumento1 páginaEjercicio de ArpegiosMarianitasPvcolAún no hay calificaciones
- MamaDocumento2 páginasMamaAngela SuañaAún no hay calificaciones
- Mercedita Tablatura y PartituraDocumento1 páginaMercedita Tablatura y PartituraBruno Nuñez A100% (6)
- La LloronaDocumento1 páginaLa LloronaRoberto Flores CruzAún no hay calificaciones
- E Digitales Lab 6Documento5 páginasE Digitales Lab 6LUIS ALBERTO CUPA HANCCOAún no hay calificaciones
- Tab Et 1Documento1 páginaTab Et 1Segundo Leonardo Rafael MendozaAún no hay calificaciones
- Tab VT 2Documento1 páginaTab VT 2Segundo Leonardo Rafael MendozaAún no hay calificaciones
- Examen de Recuperacion 1 - 2022Documento1 páginaExamen de Recuperacion 1 - 2022araña 17Aún no hay calificaciones
- Informe 4Documento17 páginasInforme 4JhoOn Luna JaenAún no hay calificaciones
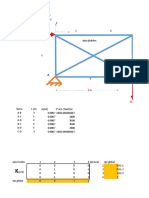
- Armadura Metodo MatricialDocumento10 páginasArmadura Metodo MatricialBrandon NovoaAún no hay calificaciones
- Cómo Te Voy A OlvidarDocumento2 páginasCómo Te Voy A OlvidarEmiliano ZapataAún no hay calificaciones
- Cronograma de Charlas 5 MinutosDocumento2 páginasCronograma de Charlas 5 Minutosseguridad-sst Construcciones semarAún no hay calificaciones
- Matriz de Rigidez Considerando Deformacion Axial y Corte 2019Documento14 páginasMatriz de Rigidez Considerando Deformacion Axial y Corte 2019JuanseRenteriaAún no hay calificaciones
- Formato de Conteo VehicularDocumento30 páginasFormato de Conteo VehicularOsber Tingal DiazAún no hay calificaciones
- 9codigos de Transmision de DatosDocumento8 páginas9codigos de Transmision de DatosYosel EviezAún no hay calificaciones
- Eje 1 y 2Documento2 páginasEje 1 y 2cc23006Aún no hay calificaciones
- Informe LABORATORIO 2Documento7 páginasInforme LABORATORIO 2Santiago BlancoAún no hay calificaciones
- T1 Formato de Conteo VehicularDocumento16 páginasT1 Formato de Conteo VehicularGiancarlo Esquivel SaldañaAún no hay calificaciones
- Semana 9Documento11 páginasSemana 9Miguel CaballeroAún no hay calificaciones
- Tab VT 1Documento1 páginaTab VT 1Segundo Leonardo Rafael MendozaAún no hay calificaciones
- Circuito Electrohidráulico A+a B+BDocumento2 páginasCircuito Electrohidráulico A+a B+BElias ContrerasAún no hay calificaciones
- 2.1. Acordes Mayores y Menores Nivel 1Documento1 página2.1. Acordes Mayores y Menores Nivel 1Leonardo joaquin Huaringa Mamani 2do GAún no hay calificaciones
- CKT 6Documento1 páginaCKT 6Juan Luis Hernandez CarrizalesAún no hay calificaciones
- Columna RoqueDocumento36 páginasColumna RoqueLucianaAún no hay calificaciones
- Columna GuidoDocumento23 páginasColumna GuidoLucianaAún no hay calificaciones
- Portico 2 CVDocumento11 páginasPortico 2 CVLucianaAún no hay calificaciones
- P Rigidez E4 ARRIOSTRADODocumento15 páginasP Rigidez E4 ARRIOSTRADOLucianaAún no hay calificaciones
- P Rigidez E4Documento12 páginasP Rigidez E4LucianaAún no hay calificaciones
- Control 1Documento13 páginasControl 1LucianaAún no hay calificaciones
- Tutorias y Talleres MatematicasDocumento23 páginasTutorias y Talleres MatematicasJeancarloParejaBarcena100% (1)
- Matematias Aplicadas para Los NegociosDocumento14 páginasMatematias Aplicadas para Los NegociosZavala Gutiérrez Brenda ValeriaAún no hay calificaciones
- Ingmate02t7grupal ECUACALORDocumento5 páginasIngmate02t7grupal ECUACALORÁngela PáezAún no hay calificaciones
- Ejercicio Espiral James CardenasDocumento9 páginasEjercicio Espiral James CardenasDario Rodriguez MejiaAún no hay calificaciones
- Investigacion UNIDAD 5Documento9 páginasInvestigacion UNIDAD 5Carlos MijangosAún no hay calificaciones
- Informe 3Documento10 páginasInforme 3Efrain Taipe YupanquiAún no hay calificaciones
- Eti N.°5Documento6 páginasEti N.°5MICHELLE HELEN RAMOS PRETELAún no hay calificaciones
- Geometría AnalíticaDocumento5 páginasGeometría AnalíticaEVER WILSON BAUTISTA HUAHUASONCCOAún no hay calificaciones
- Terapia Sistémica 100Documento20 páginasTerapia Sistémica 100Jose Luis Vidal CordovaAún no hay calificaciones
- 45 PRACTICA N1 REFORZ APREND CIRCUNFERENCIA y RT 1º SECDocumento6 páginas45 PRACTICA N1 REFORZ APREND CIRCUNFERENCIA y RT 1º SECjorge pardoAún no hay calificaciones
- Tema 3. Sistemas de Ecuaciones Lineales. Método de GaussDocumento16 páginasTema 3. Sistemas de Ecuaciones Lineales. Método de GaussE&GAún no hay calificaciones
- Taller de Programacion - Enunciado PDFDocumento2 páginasTaller de Programacion - Enunciado PDFRikárdo CamposAún no hay calificaciones
- Ciencia e HipótesisDocumento2 páginasCiencia e HipótesisRandy MadnezzAún no hay calificaciones
- Planificador Integrado de La Eda 1 Primero de SecundariaDocumento18 páginasPlanificador Integrado de La Eda 1 Primero de SecundariaJuan Benites LuisAún no hay calificaciones
- MCCDocumento8 páginasMCChongoAún no hay calificaciones
- Práctico Algebra II PDFDocumento6 páginasPráctico Algebra II PDFguillermo NunezAún no hay calificaciones
- SDR Apuntes v1.1Documento21 páginasSDR Apuntes v1.1Jerzon CulajayAún no hay calificaciones
- Cuestionario Fisica 2022-2023Documento19 páginasCuestionario Fisica 2022-2023susana rodriguezAún no hay calificaciones
- RP SM Ext RM 2022 III s9 VCDocumento4 páginasRP SM Ext RM 2022 III s9 VCNoelia Cuba CamayoAún no hay calificaciones
- Dinamica y Leyes de Newton 7 UnmsmDocumento22 páginasDinamica y Leyes de Newton 7 Unmsmpamela182212Aún no hay calificaciones
- Diseño de Cimentaciones para Máquinas Vibrantes PDFDocumento12 páginasDiseño de Cimentaciones para Máquinas Vibrantes PDFwilxj100% (2)
- Actividad 4 In.oDocumento7 páginasActividad 4 In.opolyAún no hay calificaciones
- Capitulo V Los Criterios para La Toma de PDFDocumento11 páginasCapitulo V Los Criterios para La Toma de PDFJosue MorenoAún no hay calificaciones
- LAB 4 - Cargas y Campos EléctricosDocumento3 páginasLAB 4 - Cargas y Campos EléctricosLissethAún no hay calificaciones
- Ejercicios 2Documento9 páginasEjercicios 2Valeria Villadiego HernandezAún no hay calificaciones
- Práctica 03 REPORTE.Documento11 páginasPráctica 03 REPORTE.Wendy JoselineAún no hay calificaciones