También podría gustarte
- 4.1. Método Hidrograma Unitario Sintético de SnyderDocumento2 páginas4.1. Método Hidrograma Unitario Sintético de SnyderLucia Gonzales Pariona100% (1)
- Capitulo IV - Diseño de Alcantarillado Sanitario y Planta de TratamientoDocumento71 páginasCapitulo IV - Diseño de Alcantarillado Sanitario y Planta de TratamientoRubén A. Flores RojasAún no hay calificaciones
- Diseño de Lagunas de Estabilización FacultativasDocumento6 páginasDiseño de Lagunas de Estabilización FacultativasYeniferAún no hay calificaciones
- Informe - DISEÑO GEOMETRICO DE CARRETERADocumento57 páginasInforme - DISEÑO GEOMETRICO DE CARRETERAClaudia OntiverosAún no hay calificaciones
- Análisis de Los Datos de PrecipitaciónDocumento6 páginasAnálisis de Los Datos de PrecipitaciónJavier LavadoAún no hay calificaciones
- Ejemplo 3Documento3 páginasEjemplo 3elinteligen100% (1)
- Proyecto Linea de Conduccion Por GravedadDocumento26 páginasProyecto Linea de Conduccion Por GravedadIvan CotaAún no hay calificaciones
- Análisis de consistencia de precipitaciones en estación mediante curva de doble masaDocumento3 páginasAnálisis de consistencia de precipitaciones en estación mediante curva de doble masaFabián VillamilAún no hay calificaciones
- Evapotranspiración potencial: métodos de cálculoDocumento6 páginasEvapotranspiración potencial: métodos de cálculoFlor Romani PizarroAún no hay calificaciones
- Taller #5 (Curva de Huff)Documento1 páginaTaller #5 (Curva de Huff)elkin1318Aún no hay calificaciones
- Ayuda MemoriaDocumento10 páginasAyuda MemoriaMiuller AlbornozAún no hay calificaciones
- Cálculo hidráulico ACO Design VIA SAN MARCOSDocumento3 páginasCálculo hidráulico ACO Design VIA SAN MARCOSFajardo MaríaAún no hay calificaciones
- Tesis Sobre Analisis en Periodo ExtendidoDocumento117 páginasTesis Sobre Analisis en Periodo ExtendidochristyAún no hay calificaciones
- Criterios de Diseño HidrologiaDocumento14 páginasCriterios de Diseño HidrologiaWilfredo TejerinaAún no hay calificaciones
- Determinacion de La Precipitacion MediaDocumento9 páginasDeterminacion de La Precipitacion Mediaomar llanos chantaAún no hay calificaciones
- Ejercicios de Linea de ConduccionDocumento2 páginasEjercicios de Linea de ConduccionJhon J Gil MorenoAún no hay calificaciones
- Lab. Vertedero Cresta DelgadaDocumento3 páginasLab. Vertedero Cresta DelgadaIime Pertuz MontoyiitaAún no hay calificaciones
- Normas-Ecuador - 1 - NORMAS EX IEOS NORMAS ECUATORIANAS PARADocumento53 páginasNormas-Ecuador - 1 - NORMAS EX IEOS NORMAS ECUATORIANAS PARAPriscila ObacoAún no hay calificaciones
- Hidrologia - Hidraulica Carmen de CarupaDocumento34 páginasHidrologia - Hidraulica Carmen de CarupaRoberto NiñoAún no hay calificaciones
- Taller Hidrologia PDFDocumento6 páginasTaller Hidrologia PDFdanielaAún no hay calificaciones
- (Informe 2) Textura Del SueloDocumento5 páginas(Informe 2) Textura Del SueloJhoan Ordoñez MuñozAún no hay calificaciones
- Sedimentos en EmbalsesDocumento8 páginasSedimentos en EmbalsesedgarAún no hay calificaciones
- Propagación de Ondas de CrecidasDocumento51 páginasPropagación de Ondas de CrecidasRodrigo SandovalAún no hay calificaciones
- Curvas HipsometricasDocumento5 páginasCurvas HipsometricasJuan Agreda100% (1)
- Formula de Du BoysDocumento9 páginasFormula de Du BoysVictor ReyesAún no hay calificaciones
- Diseño de unidad de filtración lenta de arenaDocumento11 páginasDiseño de unidad de filtración lenta de arenaFranklin RayoAún no hay calificaciones
- Desarenador y Canal Parshall OkeyDocumento12 páginasDesarenador y Canal Parshall OkeyAlfredo Delgado FloresAún no hay calificaciones
- Planos y Catalogos para Aprobacion LP Block Falso FondoDocumento32 páginasPlanos y Catalogos para Aprobacion LP Block Falso FondoSanty MontalvoAún no hay calificaciones
- Estrategias de Mitigación y Métodos para La Estimación de Las Emisiones de Gases Efecto Invernadero. en El Sector Transporte.Documento138 páginasEstrategias de Mitigación y Métodos para La Estimación de Las Emisiones de Gases Efecto Invernadero. en El Sector Transporte.Amaury Meran TerreroAún no hay calificaciones
- 9 Prueba Bondad Ajuste S-KDocumento15 páginas9 Prueba Bondad Ajuste S-KSebastian Andres Miranda CuevasAún no hay calificaciones
- Analisis de Consistencia Curva de Doble MasaDocumento3 páginasAnalisis de Consistencia Curva de Doble MasaLisset Soto CabelloAún no hay calificaciones
- Guia Tec AguapdfDocumento227 páginasGuia Tec AguapdfAlejandro EspinozaAún no hay calificaciones
- Hietograma de Precipitacion de Diseño Utilizando Las Relaciones IDFDocumento3 páginasHietograma de Precipitacion de Diseño Utilizando Las Relaciones IDFDiego Reivax RonAún no hay calificaciones
- SEGUNDO EXAMEN Hidrología-PreguntaDocumento3 páginasSEGUNDO EXAMEN Hidrología-PreguntaPeter Coronel RomanAún no hay calificaciones
- Computos MetricosDocumento9 páginasComputos MetricosJosep LarcianAún no hay calificaciones
- 1er Escalonado HidrologíaDocumento13 páginas1er Escalonado HidrologíaRonal Cano100% (1)
- Proyecto Rio CañasDocumento53 páginasProyecto Rio Cañasnadia montellanos0% (1)
- Informe Viaje Al Proyecto Zinthia 2Documento45 páginasInforme Viaje Al Proyecto Zinthia 2Jenner Quicaño PradoAún no hay calificaciones
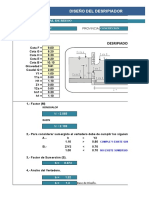
- Diseño Del DesripiadorDocumento6 páginasDiseño Del DesripiadorRocio Yovana Rondoño ChavezAún no hay calificaciones
- Tecnologia Cepis para El Tratamiento de AguaDocumento13 páginasTecnologia Cepis para El Tratamiento de AguaRene Morales100% (1)
- B) Hidraulica de Tuberias y Canales. FinalDocumento46 páginasB) Hidraulica de Tuberias y Canales. FinalBoris Kevin QCAún no hay calificaciones
- Practico# 1 Obras HidraulicasDocumento27 páginasPractico# 1 Obras HidraulicasAlejandro SanchezAún no hay calificaciones
- Estadística y Probabilidades en HidrologiaDocumento71 páginasEstadística y Probabilidades en HidrologiaUnknowAún no hay calificaciones
- Cáculos Sedimentos Embalses V - 01Documento17 páginasCáculos Sedimentos Embalses V - 01andrea mariana Diaz ChoqueAún no hay calificaciones
- Cap 4 - E.especifica y Tirante CriticoDocumento7 páginasCap 4 - E.especifica y Tirante CriticoLucio TorresAún no hay calificaciones
- Delimitacion y Parámetros de Una Cuenca PDFDocumento40 páginasDelimitacion y Parámetros de Una Cuenca PDFCésar MatiasAún no hay calificaciones
- Laboratorio 02 - Flujo UniformeDocumento2 páginasLaboratorio 02 - Flujo UniformeCristhianAún no hay calificaciones
- Informe de PaipaDocumento6 páginasInforme de PaipaNancy RodriguezAún no hay calificaciones
- Texto Guía para El Curso de Obras HidráulicasDocumento420 páginasTexto Guía para El Curso de Obras Hidráulicassucchaprimaveral100% (2)
- Transito de CrecientesDocumento11 páginasTransito de CrecientesGido Zapana EstofaneroAún no hay calificaciones
- Proyecto Marco Partidor DOHDocumento8 páginasProyecto Marco Partidor DOHMIGUEL IGNACIO HERRERA BENITOAún no hay calificaciones
- 5 Mollendo 03 - Mezcla RapidaDocumento2 páginas5 Mollendo 03 - Mezcla RapidaYR GR0% (1)
- Normas técnicas alcantarilladoDocumento51 páginasNormas técnicas alcantarilladofojunshaAún no hay calificaciones
- JEE 7 a Fondo: Diseño y desarrollo de aplicaciones Java EnterpriseDe EverandJEE 7 a Fondo: Diseño y desarrollo de aplicaciones Java EnterpriseAún no hay calificaciones
- Volumen 1 SldwrksDocumento378 páginasVolumen 1 SldwrksLuis gcAún no hay calificaciones
- Pro Tools MetodoDocumento1306 páginasPro Tools MetodoDomingoAún no hay calificaciones
- Robótica y domótica básica con Arduino: Contiene 28 prácticas explicadasDe EverandRobótica y domótica básica con Arduino: Contiene 28 prácticas explicadasAún no hay calificaciones
- MapInfo Professional User GuideDocumento617 páginasMapInfo Professional User GuideJorge Iván Ledezma Montesinos100% (2)
- Visual Basic.NET Curso de Programación: Diseño de juegos de PC/ordenadorDe EverandVisual Basic.NET Curso de Programación: Diseño de juegos de PC/ordenadorCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Uso Del Agua DulceDocumento2 páginasUso Del Agua DulceCarlos Gallardo CopaAún no hay calificaciones
- Huella HidricaDocumento2 páginasHuella HidricaCarlos Gallardo CopaAún no hay calificaciones
- Niveles organización biológica plantas y animalesDocumento3 páginasNiveles organización biológica plantas y animalesCarlos Gallardo CopaAún no hay calificaciones
- Uso Del Agua DulceDocumento3 páginasUso Del Agua DulceCarlos Gallardo CopaAún no hay calificaciones
- Cuenta La Leyenda Que Existió Un Inca QueDocumento3 páginasCuenta La Leyenda Que Existió Un Inca QueCarlos Gallardo CopaAún no hay calificaciones
- PDM SoracachiDocumento70 páginasPDM SoracachiCarlos Gallardo CopaAún no hay calificaciones
- Anhídridos TemaDocumento6 páginasAnhídridos TemaMonzerrat Arroyo VelásquezAún no hay calificaciones
- Tema #13 Dia de La Patria C.soc.Documento2 páginasTema #13 Dia de La Patria C.soc.Carlos Gallardo CopaAún no hay calificaciones
- Dato MensualesDocumento8 páginasDato MensualesCarlos Gallardo CopaAún no hay calificaciones
- Ventajas de El EmbarazoDocumento2 páginasVentajas de El EmbarazoCarlos Gallardo CopaAún no hay calificaciones
- Patria BolivianaDocumento2 páginasPatria BolivianaCarlos Gallardo CopaAún no hay calificaciones
- Dato DiariosDocumento64 páginasDato DiariosCarlos Gallardo CopaAún no hay calificaciones
- Tema #7 El Aparato Digestivo C. Nat.Documento2 páginasTema #7 El Aparato Digestivo C. Nat.Carlos Gallardo CopaAún no hay calificaciones
- Informe de LaboratorioDocumento2 páginasInforme de LaboratorioCarlos Gallardo CopaAún no hay calificaciones
- El Embarazo A Temprana EdadDocumento2 páginasEl Embarazo A Temprana EdadCarlos Gallardo CopaAún no hay calificaciones
- Tema #2 El Tallado ArtDocumento1 páginaTema #2 El Tallado ArtCarlos Gallardo CopaAún no hay calificaciones
- Óxidos y peróxidosDocumento8 páginasÓxidos y peróxidosCarlos Gallardo CopaAún no hay calificaciones
- Teatro para El Dia de La FamiliaDocumento5 páginasTeatro para El Dia de La FamiliaCarlos Gallardo CopaAún no hay calificaciones
- Protección quirquincho andino garantizadaDocumento2 páginasProtección quirquincho andino garantizadaCarlos Gallardo CopaAún no hay calificaciones
- Tema #6 El Adjetivo LengDocumento2 páginasTema #6 El Adjetivo LengCarlos Gallardo CopaAún no hay calificaciones
- Aparato Circulatorio C. Nat.Documento1 páginaAparato Circulatorio C. Nat.Carlos Gallardo CopaAún no hay calificaciones
- 6to. Secundaria 2do. TrimDocumento288 páginas6to. Secundaria 2do. TrimValores Espiritualidades y Religiones100% (1)
- Tema # 10 Poesia LengDocumento2 páginasTema # 10 Poesia LengCarlos Gallardo CopaAún no hay calificaciones
- 4to. Secundaria 2do. Trim.Documento372 páginas4to. Secundaria 2do. Trim.Carlos Gallardo CopaAún no hay calificaciones
- Informe de LaboratorioDocumento2 páginasInforme de LaboratorioCarlos Gallardo CopaAún no hay calificaciones
- Eficiencia Vinculada A La Operacion y Mantenimiento de Pequenas Plantas de Tratamiento de Aguas Residuales Domesticas en Cochabamba BoliviaDocumento20 páginasEficiencia Vinculada A La Operacion y Mantenimiento de Pequenas Plantas de Tratamiento de Aguas Residuales Domesticas en Cochabamba BoliviaCarlos Gallardo CopaAún no hay calificaciones
- 5to. Secundaria 2do. Trim.Documento332 páginas5to. Secundaria 2do. Trim.Carlos Gallardo CopaAún no hay calificaciones
- Especificaciones Tecnicas Particulares 2Documento23 páginasEspecificaciones Tecnicas Particulares 2Carlos Gallardo CopaAún no hay calificaciones
- Óxidos Ácidos o Anhídridos para Primer Grado de SecundariaDocumento2 páginasÓxidos Ácidos o Anhídridos para Primer Grado de SecundariaCarlos Gallardo CopaAún no hay calificaciones
- 3ro. Secundaria 2do. Trim.Documento318 páginas3ro. Secundaria 2do. Trim.Carlos Gallardo CopaAún no hay calificaciones
- Diseño de Tanque ImhoffDocumento9 páginasDiseño de Tanque Imhoffjorge rabanalAún no hay calificaciones
- Determinación de Cálidad de AguasDocumento13 páginasDeterminación de Cálidad de AguassantiAún no hay calificaciones
- Mejora calidad agua residual mediante cloración para riego césped PTAR Cemtrar-UNALMDocumento1 páginaMejora calidad agua residual mediante cloración para riego césped PTAR Cemtrar-UNALMXiomara Belen Quiroz RoncerosAún no hay calificaciones
- Formato 01 TUPADocumento2 páginasFormato 01 TUPAThalia SEAún no hay calificaciones
- Avisos SEMARNAT publicación febrero 2021Documento8 páginasAvisos SEMARNAT publicación febrero 2021NAPSAún no hay calificaciones
- Maricarmen Osnaya RuizDocumento189 páginasMaricarmen Osnaya RuizJohames Alexander Cruz Correa50% (2)
- Pfi 3ia 2022 GabDocumento221 páginasPfi 3ia 2022 GabJesus PerezAún no hay calificaciones
- Programa MoocAndroidDocumento108 páginasPrograma MoocAndroidMarco CamachoAún no hay calificaciones
- FALL Expropiac Constr PTAR ARBELAEZ 2013 00013Documento19 páginasFALL Expropiac Constr PTAR ARBELAEZ 2013 00013Sandra Bertel LAún no hay calificaciones
- Determinación de Fósforo, Guerra, Dávila, Ospino, Romero.Documento10 páginasDeterminación de Fósforo, Guerra, Dávila, Ospino, Romero.Augusto Muñoz VillarrealAún no hay calificaciones
- Jhon Richard Santillan Gomez Trabajo de Investigacion Final 2294619 990660153Documento104 páginasJhon Richard Santillan Gomez Trabajo de Investigacion Final 2294619 990660153jhon richardAún no hay calificaciones
- 04-Anejo Nº 4 Dimensionamiento EDAR PDFDocumento35 páginas04-Anejo Nº 4 Dimensionamiento EDAR PDFJaime Olazo MolloAún no hay calificaciones
- 2149-Texto Del Artículo-11088-1-10-20190405Documento4 páginas2149-Texto Del Artículo-11088-1-10-20190405Ana Gabriela Rodríguez GómezAún no hay calificaciones
- Práctica Calificada Parque Industrial de Rio SecoDocumento1 páginaPráctica Calificada Parque Industrial de Rio SecoJORGE LUIS BENAVENTE MUÑOZAún no hay calificaciones
- Saneamiento Básico.Documento2 páginasSaneamiento Básico.Yuri Diana SotoAún no hay calificaciones
- 12.resol. Disp Terreno - ApongoDocumento6 páginas12.resol. Disp Terreno - Apongoyessily mayte huyhua garciaAún no hay calificaciones
- Casos de RemediacionDocumento5 páginasCasos de RemediacionCarolina Coll Cardenas VegaAún no hay calificaciones
- Manual de O&m Sistema de Alcantarillado AaDocumento22 páginasManual de O&m Sistema de Alcantarillado AaginoAún no hay calificaciones
- Implementación de La Tecnología SBRDocumento315 páginasImplementación de La Tecnología SBRMichelle RodriguezAún no hay calificaciones
- Imprimir Deber 2 AguasDocumento9 páginasImprimir Deber 2 AguasMichelle AlejandraAún no hay calificaciones
- Informe de Laboratorio 1Documento9 páginasInforme de Laboratorio 1Natalia SáenzAún no hay calificaciones
- Plan-De-estudio-operación y Diseño Ptar 2022.Documento3 páginasPlan-De-estudio-operación y Diseño Ptar 2022.Jhonatan Moreno RodriguezAún no hay calificaciones
- Mijas Semanal Nº569 Del 7 Al 13 de Febrero de 2014Documento40 páginasMijas Semanal Nº569 Del 7 Al 13 de Febrero de 2014mijassemanalAún no hay calificaciones
- El Fascinante Mundo MicrobiologicoDocumento18 páginasEl Fascinante Mundo MicrobiologicoJ MIGUEL CERVANTES AAún no hay calificaciones
- Depuracion Natural Viviendas Unifamiliares Jun 15Documento20 páginasDepuracion Natural Viviendas Unifamiliares Jun 15Noemi GarciaAún no hay calificaciones
- Técnicas de ProcesamientoDocumento19 páginasTécnicas de ProcesamientoMario Mora GarciaAún no hay calificaciones
- Informe de ToxicidadDocumento17 páginasInforme de ToxicidadPilar TorresAún no hay calificaciones
- Enriquez CIC SDDocumento62 páginasEnriquez CIC SDZayha SacAún no hay calificaciones
- LMP Del PeruDocumento10 páginasLMP Del PeruJuan OsoresAún no hay calificaciones
- Guión de Prácticas de Laboratorio - 2022-2023 (GIELEC)Documento51 páginasGuión de Prácticas de Laboratorio - 2022-2023 (GIELEC)Guille NovalAún no hay calificaciones