También podría gustarte
- Mapa Conceptual - Dinámica Plana Del Cuerpo RígidoDocumento1 páginaMapa Conceptual - Dinámica Plana Del Cuerpo RígidoRoyer Ocampo100% (1)
- BiomecanicaDocumento1 páginaBiomecanicaMarcelaPereiraAún no hay calificaciones
- Mapa Conceptual E&EDocumento1 páginaMapa Conceptual E&EElian Fernando Ariza QuirogaAún no hay calificaciones
- Mapa MentalDocumento1 páginaMapa MentalAmzi BlankAún no hay calificaciones
- Anaya Rojas Evelyn IyariDocumento4 páginasAnaya Rojas Evelyn IyariIyari AnayaAún no hay calificaciones
- Cilindro de Guiado Numatics Serie p2l-p2bDocumento5 páginasCilindro de Guiado Numatics Serie p2l-p2bBase SistemasAún no hay calificaciones
- PentacamDocumento1 páginaPentacamPaulaAún no hay calificaciones
- EPOCDocumento1 páginaEPOCAntoniaAún no hay calificaciones
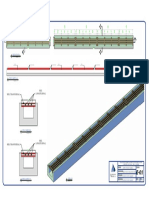
- 04.-Plano Arquitecturas Estructuras Puente ....Documento1 página04.-Plano Arquitecturas Estructuras Puente ....nilo curi rojasAún no hay calificaciones
- FORMATODocumento22 páginasFORMATOAnderson GutierrezAún no hay calificaciones
- Mapa Mental HidrodinamicaDocumento1 páginaMapa Mental HidrodinamicaViridiana Alba Calderon100% (2)
- Mapa Mental HidrodinamicaDocumento1 páginaMapa Mental HidrodinamicaViridiana Alba Calderon0% (1)
- Wuolah Free 1. Configuracion EstructuralDocumento9 páginasWuolah Free 1. Configuracion EstructuralPatriciaAún no hay calificaciones
- Ssitema de TiendasDocumento3 páginasSsitema de TiendasDiana Carolina Cornejo TorreblancaAún no hay calificaciones
- 2 - Artes Visuales - Casale - Carátula - 1ro 2da - 2.021Documento5 páginas2 - Artes Visuales - Casale - Carátula - 1ro 2da - 2.021AilinビスケットAún no hay calificaciones
- Ficha Tecnica Completa Mazda 3 Compressed 240309 062726Documento6 páginasFicha Tecnica Completa Mazda 3 Compressed 240309 062726Ricky BabiAún no hay calificaciones
- Plan - Destrezas - Sec 1 P FÍSICADocumento6 páginasPlan - Destrezas - Sec 1 P FÍSICAEdwin MarceloAún no hay calificaciones
- Sistemas de Representación - FichaT. N°3Documento12 páginasSistemas de Representación - FichaT. N°3millyevs2017Aún no hay calificaciones
- Mazda 3Documento6 páginasMazda 3Samuel BetancourtAún no hay calificaciones
- Cedula de Cables Y Tuberias Conduit: Pti-IdDocumento4 páginasCedula de Cables Y Tuberias Conduit: Pti-Idfer salgadoAún no hay calificaciones
- Esquema Ud 3 TADocumento1 páginaEsquema Ud 3 TAStefany PintoAún no hay calificaciones
- WB97R eDocumento8 páginasWB97R ePaco Hidalgo100% (1)
- Pll-Yuly QuinayasDocumento1 páginaPll-Yuly QuinayasGESTIONAMOS SERVICIOSAún no hay calificaciones
- 396 412 CBP Fid2761Documento17 páginas396 412 CBP Fid2761Antonio RiquelmeAún no hay calificaciones
- Modelo RegulaciónDocumento3 páginasModelo RegulaciónAngel Omar Diaz TutaAún no hay calificaciones
- SAMPER PRESENTACION - PpsDocumento171 páginasSAMPER PRESENTACION - PpsWilliams TorresAún no hay calificaciones
- Actividad 2 Mapa MentalDocumento1 páginaActividad 2 Mapa MentalluisAún no hay calificaciones
- Vacantes Isba 2024 Marzo A Desplazar. 2Documento4 páginasVacantes Isba 2024 Marzo A Desplazar. 2Emiliana GrégoireAún no hay calificaciones
- Mapa Mental de Cables y MecanismosDocumento2 páginasMapa Mental de Cables y MecanismosTamal MisticoAún no hay calificaciones
- Mapa - Mental.secuencias - Etap y Result.-Frank M.TDocumento2 páginasMapa - Mental.secuencias - Etap y Result.-Frank M.TFrank Giovanni Mamani TorresAún no hay calificaciones
- Diagrama FASTDocumento1 páginaDiagrama FASTBRAYAN STEVEN TORRADO GOMEZAún no hay calificaciones
- Registro Auxiliar 2010 de 5TO ERNESTODocumento31 páginasRegistro Auxiliar 2010 de 5TO ERNESTOLuis Soto GonzalesAún no hay calificaciones
- Elementos EstructuralesDocumento2 páginasElementos EstructuralesCatalina DuránAún no hay calificaciones
- Mapa Conceptual E&EDocumento1 páginaMapa Conceptual E&EElian Fernando Ariza QuirogaAún no hay calificaciones
- Mapa Conceptual E&EDocumento1 páginaMapa Conceptual E&EElian Fernando Ariza QuirogaAún no hay calificaciones
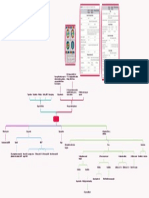
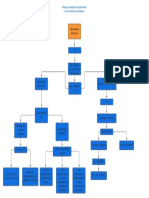
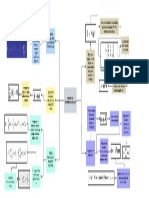
- Actividad 1.1 Mapa Conceptual de Aplicación Del Análisis ArmónicoDocumento1 páginaActividad 1.1 Mapa Conceptual de Aplicación Del Análisis ArmónicoJORGE LUIS GOMEZ LOPEZAún no hay calificaciones
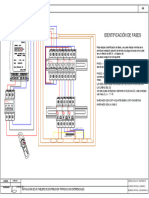
- Identificación de Fase Con AmperímetroDocumento1 páginaIdentificación de Fase Con AmperímetroWILFREDO MARTIN CORDOVA OLAYAAún no hay calificaciones
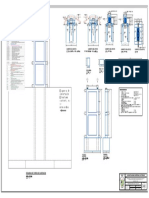
- Instalacion de Tableros UpsDocumento2 páginasInstalacion de Tableros UpsJhean Carlo Lizama Cornejo0% (1)
- 1BACH - Circuitos Neumáticos e HidráulicosDocumento28 páginas1BACH - Circuitos Neumáticos e Hidráulicosjeferson copete mosqueraAún no hay calificaciones
- Resumen Anatomia I Apuntes BasicosDocumento11 páginasResumen Anatomia I Apuntes BasicosDavid JaramilloAún no hay calificaciones
- 06 FlexionDocumento32 páginas06 FlexionmicaAún no hay calificaciones
- 01 - Modulo - 1-ELECTROSTATICA SeparataDocumento120 páginas01 - Modulo - 1-ELECTROSTATICA SeparataJHONATAN ROBERTO FLORES JOAQUINAún no hay calificaciones
- FichaTermino 282924Documento8 páginasFichaTermino 282924Cristhian Junior López ChanaméAún no hay calificaciones
- Mapa Cables y ArcosDocumento1 páginaMapa Cables y ArcosMiguel ContrerasAún no hay calificaciones
- Dinamica Del Movimiento AngularDocumento1 páginaDinamica Del Movimiento AngularAron Loaiza MongeAún no hay calificaciones
- Mapa Conceptual I UnidadDocumento1 páginaMapa Conceptual I UnidadCRISTIAN MARINO CORONEL SERVANAún no hay calificaciones
- Mapa Movimiento Curvilineo de La ParticulaDocumento1 páginaMapa Movimiento Curvilineo de La ParticulaWille Ortiz CernaAún no hay calificaciones
- Tabla MetarDocumento1 páginaTabla MetarCesar VecinoAún no hay calificaciones
- Informe Vigo RuizDocumento11 páginasInforme Vigo RuizAlejandro 1 VigoAún no hay calificaciones
- Topografia 01Documento1 páginaTopografia 01DEATH BLACKAún no hay calificaciones
- CARTOGRAFIASDocumento8 páginasCARTOGRAFIASEsteban Pizarro EscalanteAún no hay calificaciones
- 12.7 Plano de Señalización y Desvios-Dn04 KM 513+850 Al KM 514+064Documento1 página12.7 Plano de Señalización y Desvios-Dn04 KM 513+850 Al KM 514+064Le mans QuatroAún no hay calificaciones
- Guía 3. Evaluativa de Seguimiento 5°Documento9 páginasGuía 3. Evaluativa de Seguimiento 5°maria eugenia agudeloAún no hay calificaciones
- Neumática Simbologia y DescripcionDocumento9 páginasNeumática Simbologia y DescripcionEdison LazAún no hay calificaciones
- Proyecto Parrillas - Bella Aurora-A-4Documento1 páginaProyecto Parrillas - Bella Aurora-A-4Milton Yoser Infantes MonteroAún no hay calificaciones
- Resumen Control PosturalDocumento1 páginaResumen Control PosturalSAMUEL ESTEBAN MONZON GONZALEZAún no hay calificaciones
- Plancha de Implantacion y ConceptoDocumento1 páginaPlancha de Implantacion y ConceptoJohnny Yanguatin AlvaradoAún no hay calificaciones
- Cadena Catarina Bandas y PoleasDocumento1 páginaCadena Catarina Bandas y PoleasCristian Sanchez GuilcamaiguaAún no hay calificaciones
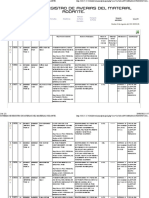
- Sistema de Registro de Averias Del Material Rodante.Documento5 páginasSistema de Registro de Averias Del Material Rodante.Raymundo Galdino Resendiz ArceAún no hay calificaciones
- Problema Piña OscarDocumento8 páginasProblema Piña OscarOscar Fernando Piña BeltranAún no hay calificaciones
- Info Expo PacoDocumento3 páginasInfo Expo PacoOscar Fernando Piña BeltranAún no hay calificaciones
- Practica Simbología - Piña OscarDocumento5 páginasPractica Simbología - Piña OscarOscar Fernando Piña BeltranAún no hay calificaciones
- P1 U1 Instalaciones ElectricasDocumento9 páginasP1 U1 Instalaciones ElectricasOscar Fernando Piña BeltranAún no hay calificaciones
- I1 U3 Piña OscarDocumento10 páginasI1 U3 Piña OscarOscar Fernando Piña BeltranAún no hay calificaciones
- UDocumento2 páginasUOscar Fernando Piña BeltranAún no hay calificaciones
- Problemario MDocumento2 páginasProblemario MOscar Fernando Piña BeltranAún no hay calificaciones
- Instituto Tecnologico Superior de Cananea Ingenieria Electromecanica Practicas de Laboratorio de Analisis Y Sintesis de MecanismosDocumento5 páginasInstituto Tecnologico Superior de Cananea Ingenieria Electromecanica Practicas de Laboratorio de Analisis Y Sintesis de MecanismosOscar Fernando Piña BeltranAún no hay calificaciones
- Plan de Levantamiento e Izaje de CargaDocumento2 páginasPlan de Levantamiento e Izaje de CargaAnyi CuervoAún no hay calificaciones
- Curso H2 Verde - Dia 1 - Producción de H2Documento59 páginasCurso H2 Verde - Dia 1 - Producción de H2Francisco Ignacio Soto VergaraAún no hay calificaciones
- Taller de Probabilidades AlumnosDocumento9 páginasTaller de Probabilidades AlumnosMISOL GALLEGUILLOS CALLEJASAún no hay calificaciones
- Tabla Tiempos Cocción Olla Expres PDFDocumento6 páginasTabla Tiempos Cocción Olla Expres PDFJosé Ricardo Lobeto GonzálezAún no hay calificaciones
- Ejercicio 2 ConvulocionesDocumento5 páginasEjercicio 2 Convulocionesbryan leonardo garcia leon100% (1)
- FT Brodifacoum PelletsDocumento4 páginasFT Brodifacoum PelletshemilyAún no hay calificaciones
- Práctica - Marco - Sección VariableDocumento12 páginasPráctica - Marco - Sección VariableSergio Martínez De JesúsAún no hay calificaciones
- Cristalografia Cap. 12 Difraccion de Rayos X Por Los CristalesDocumento36 páginasCristalografia Cap. 12 Difraccion de Rayos X Por Los CristalesFernando Terán ToledoAún no hay calificaciones
- ACTIVIDAD 4 CyT 3° - EXP.N°1Documento6 páginasACTIVIDAD 4 CyT 3° - EXP.N°1Dulce MiaAún no hay calificaciones
- Operaciones Con DecimalesDocumento9 páginasOperaciones Con DecimalesIris Ortiz DelgadoAún no hay calificaciones
- Taller El Método CientíficoDocumento6 páginasTaller El Método CientíficoalvaroAún no hay calificaciones
- Folleto Thermoacustic + - 20221216 - ES - EN - DDocumento6 páginasFolleto Thermoacustic + - 20221216 - ES - EN - DJoe PepperoniAún no hay calificaciones
- Epistemologia de La Bibliotecología5 - 230817 - 211112Documento10 páginasEpistemologia de La Bibliotecología5 - 230817 - 211112Denise SanabriaAún no hay calificaciones
- Analisis de Contingencias Con Flujos DirDocumento5 páginasAnalisis de Contingencias Con Flujos Dirmarco martinezAún no hay calificaciones
- SOLUCIONARIO ELEMENTOS DE MAQUINAS LLDocumento50 páginasSOLUCIONARIO ELEMENTOS DE MAQUINAS LLSipudieras VerAún no hay calificaciones
- Tablas de Reconocimiento PDFDocumento8 páginasTablas de Reconocimiento PDFGuisAún no hay calificaciones
- Falta El Fichero CDocumento3 páginasFalta El Fichero Csebas_jairAún no hay calificaciones
- Arranque y PruebasDocumento10 páginasArranque y PruebasJhon C. PortillaAún no hay calificaciones
- Espectrofotómetro InfrarrojoDocumento21 páginasEspectrofotómetro InfrarrojoGiselle SanchezAún no hay calificaciones
- Preparador de Clases Matematicas 2021Documento20 páginasPreparador de Clases Matematicas 2021Nick LryonAún no hay calificaciones
- Copia de MATRICES DE CONTENIDOS PCI InformaticaDocumento40 páginasCopia de MATRICES DE CONTENIDOS PCI Informaticaarutam83Aún no hay calificaciones
- P 3. Guía Práctica BoucherieDocumento4 páginasP 3. Guía Práctica BoucherieOmar Ruben Mealla MontellanoAún no hay calificaciones
- Perfil de Egreso de Primer Grado GradoDocumento4 páginasPerfil de Egreso de Primer Grado GradoRivero Perdomo Richard Jode75% (64)
- Brochure Curso Autocad Civil 3d 2014Documento3 páginasBrochure Curso Autocad Civil 3d 2014skullkAún no hay calificaciones
- Prueba3 Fisica 3 C PautaDocumento8 páginasPrueba3 Fisica 3 C PautaAndres Rehbein MAún no hay calificaciones
- Catálogo Polipastos America Series de Cable DICDocumento10 páginasCatálogo Polipastos America Series de Cable DICoscarAún no hay calificaciones
- Compresor MultietapaDocumento3 páginasCompresor MultietapaAlex Aguirre100% (1)
- Guía de TP-Energia-Prof. Carlos Cruz - 2023Documento2 páginasGuía de TP-Energia-Prof. Carlos Cruz - 2023Tupac 2006Aún no hay calificaciones
- Variaciones Porcentuales, Aumentos y Descuentos LlapanaticDocumento4 páginasVariaciones Porcentuales, Aumentos y Descuentos LlapanaticANGEL FRANCISCO YANAC ROQUEAún no hay calificaciones
- LTP Tema1 15 16Documento93 páginasLTP Tema1 15 16Xema Calabozo AlmuñecarAún no hay calificaciones