También podría gustarte
- CrucigramaDocumento2 páginasCrucigramaGuizar Diaz CristianAún no hay calificaciones
- Estudio de Caso MecanismosDocumento60 páginasEstudio de Caso MecanismosErik Blanco0% (1)
- Practic 7 Flip FlopDocumento5 páginasPractic 7 Flip FlopJoel Maldonado MendezAún no hay calificaciones
- Libro de GuillenDocumento451 páginasLibro de GuillenRoberto GonzálezAún no hay calificaciones
- Mecanismos RotacionalesDocumento8 páginasMecanismos Rotacionaleszorick sanchezAún no hay calificaciones
- Fluidos IncompresiblesDocumento6 páginasFluidos IncompresiblesVictor ReyesAún no hay calificaciones
- Ejercicio 4Documento4 páginasEjercicio 4Martin Hasskel100% (1)
- Reporte BJTDocumento3 páginasReporte BJTyoAún no hay calificaciones
- Mecanismo de 4 BarrasDocumento4 páginasMecanismo de 4 BarrasPablo Martin CadenaAún no hay calificaciones
- Unidad 1: Análisis de uniones soldadas y sujetadas por pernosDocumento10 páginasUnidad 1: Análisis de uniones soldadas y sujetadas por pernosBoris EspinozaAún no hay calificaciones
- Actividad 3 - UII - Nava Beltrán JavierDocumento13 páginasActividad 3 - UII - Nava Beltrán Javierjavier navaAún no hay calificaciones
- Taller1unidad1parcial1 DiseñoDocumento5 páginasTaller1unidad1parcial1 DiseñoJuan Lomas12Aún no hay calificaciones
- Cinematica Engranes MecanismosDocumento29 páginasCinematica Engranes MecanismosGustavo Díaz come pingaAún no hay calificaciones
- Investigación sobre diodos comercialesDocumento8 páginasInvestigación sobre diodos comercialesJair Tamayo GtzAún no hay calificaciones
- T1 TrenesDocumento6 páginasT1 TrenesJesus Rodrigo Cordoba LunaAún no hay calificaciones
- DEBER DE DISEÑO DE ELEMENTOS Y MÁQUINAS PARCIAL 1Documento6 páginasDEBER DE DISEÑO DE ELEMENTOS Y MÁQUINAS PARCIAL 1Andres Aman CuadradoAún no hay calificaciones
- Potencia disipada en resistencia de circuito RCDocumento5 páginasPotencia disipada en resistencia de circuito RCIsmael MedinaAún no hay calificaciones
- Analisis de VelocidadDocumento4 páginasAnalisis de VelocidadRodrigo de Jesús Rangel LozanoAún no hay calificaciones
- Fuerza Contraelectromotriz Inducida en Un MotorDocumento5 páginasFuerza Contraelectromotriz Inducida en Un MotorJohan Ccanchillo TinucoAún no hay calificaciones
- Clase Mecanismos 2 GR 1 19-05Documento3 páginasClase Mecanismos 2 GR 1 19-05jorge rodriguezAún no hay calificaciones
- ProblemarioDocumento77 páginasProblemarioCESAR HERNANDEZAún no hay calificaciones
- Problema 8.18Documento3 páginasProblema 8.18Julio Cesar Castillo DelgadoAún no hay calificaciones
- Regulación tensiónDocumento10 páginasRegulación tensiónIsaac OrocioAún no hay calificaciones
- La Relación de Vueltas en Un Transformador Es Igual A La Relación de Voltajes A Través de Un TransformadorDocumento4 páginasLa Relación de Vueltas en Un Transformador Es Igual A La Relación de Voltajes A Través de Un TransformadorCarlos Mauricio Barrientos JimenezAún no hay calificaciones
- Zambrano EngranesDocumento29 páginasZambrano EngranesJosue MendozaAún no hay calificaciones
- Tarea 3Documento1 páginaTarea 3Alex AtencioAún no hay calificaciones
- Electronica Analogica Unidad 3Documento24 páginasElectronica Analogica Unidad 3Miguel Aparicio HernándezAún no hay calificaciones
- Diseño de levas para movimiento de seguidoresDocumento2 páginasDiseño de levas para movimiento de seguidoresCuauhtemoc Mazon ValadezAún no hay calificaciones
- Componentes electroneumáticaDocumento2 páginasComponentes electroneumáticaIrma SotoAún no hay calificaciones
- Informe Ciclo Stirling y EricssonDocumento11 páginasInforme Ciclo Stirling y EricssonJavier ZapataAún no hay calificaciones
- Formulario Mecanismos y MáquinasDocumento2 páginasFormulario Mecanismos y MáquinasjamesAún no hay calificaciones
- Instituto Tecnológico Nacional de México: Síntesis Analítica de MecanismosDocumento5 páginasInstituto Tecnológico Nacional de México: Síntesis Analítica de MecanismosOscar EscobedoAún no hay calificaciones
- Cojinetesdesuperficieplana PDFDocumento17 páginasCojinetesdesuperficieplana PDFJorge LuisAún no hay calificaciones
- Actividad GrupalDocumento74 páginasActividad GrupalKATY LISBETH MOROCHO GUACHOAún no hay calificaciones
- S2 - Mecanismos PDFDocumento29 páginasS2 - Mecanismos PDFchristianAún no hay calificaciones
- Pregunta ExamenDocumento9 páginasPregunta ExamenAmilcar RuizAún no hay calificaciones
- Rectificadores de Onda Continua Con Series de FourierDocumento4 páginasRectificadores de Onda Continua Con Series de FourierLuchinEQAún no hay calificaciones
- Cuestionario Tercer Parcial - Grupo IDocumento43 páginasCuestionario Tercer Parcial - Grupo IJavier BasAún no hay calificaciones
- LevasDocumento33 páginasLevasFrancisco Javier Orellana ContrerasAún no hay calificaciones
- LabNo4 Mec Retorno Rapido 15feb2014Documento8 páginasLabNo4 Mec Retorno Rapido 15feb2014JOELAún no hay calificaciones
- Maquinas Electricas Informe 2Documento12 páginasMaquinas Electricas Informe 2Juan MenaAún no hay calificaciones
- Cálculo de parámetros de engranes cilíndricos rectosDocumento2 páginasCálculo de parámetros de engranes cilíndricos rectosDavid MorenoAún no hay calificaciones
- Tarea 1 Dinámica O-M 2019-2020Documento4 páginasTarea 1 Dinámica O-M 2019-2020HolaSoyJhanferSotomayorAún no hay calificaciones
- CINEMÁTICADocumento8 páginasCINEMÁTICACristhiam Flores ZavalaAún no hay calificaciones
- Analisis de Frecuencia Natural en Un Perfil W EmpotradaDocumento9 páginasAnalisis de Frecuencia Natural en Un Perfil W EmpotradaMichael AriasAún no hay calificaciones
- Tabulación de Centros InstantaneosDocumento50 páginasTabulación de Centros InstantaneosmijachuAún no hay calificaciones
- Fluid Mechanics SolutionDocumento2 páginasFluid Mechanics SolutionAndres Felipe PossosAún no hay calificaciones
- 4° El Transistor BJT Como Interruptor 1Documento14 páginas4° El Transistor BJT Como Interruptor 1Josue PorrasAún no hay calificaciones
- 5 10 19 24 MecanismosDocumento4 páginas5 10 19 24 Mecanismoshector ortizAún no hay calificaciones
- Capitulo 8 WordDocumento104 páginasCapitulo 8 Word....Aún no hay calificaciones
- Barra de Sección CónicaDocumento20 páginasBarra de Sección CónicaBoris PumisachoAún no hay calificaciones
- Trabajo de Regularización LevasDocumento1 páginaTrabajo de Regularización LevasAndres Villegas MartinezAún no hay calificaciones
- Diagrama Esfuerzo de Fatiga Número de CiclosDocumento3 páginasDiagrama Esfuerzo de Fatiga Número de CiclosMisael Vázquez PérezAún no hay calificaciones
- T3 GonzálezdávalosDocumento17 páginasT3 GonzálezdávalosW JULIO DÁVALOS DIAZAún no hay calificaciones
- Manual de Maquinas Electricas Ut TecamachalcoDocumento139 páginasManual de Maquinas Electricas Ut TecamachalcoJuanAún no hay calificaciones
- Laboratorio3 MEDIDA DE LA IMPEDANCIADocumento26 páginasLaboratorio3 MEDIDA DE LA IMPEDANCIAxd S:Aún no hay calificaciones
- Diseño de Un EjeDocumento30 páginasDiseño de Un EjeandresAún no hay calificaciones
- Trenes de Engranes Planetarios: Características y Cálculo de Velocidades AngularesDocumento20 páginasTrenes de Engranes Planetarios: Características y Cálculo de Velocidades AngularesMane EstrellaAún no hay calificaciones
- Tren EngranesDocumento59 páginasTren EngranesAdolfo MoscosoAún no hay calificaciones
- Segundo Lab PotenciaDocumento21 páginasSegundo Lab PotenciaJorgeEliecerVillamilTorresAún no hay calificaciones
- Marcelo Santiago y Jorge VillamilDocumento16 páginasMarcelo Santiago y Jorge VillamilJorgeEliecerVillamilTorresAún no hay calificaciones
- Ejercicios ElectroneumáticaDocumento16 páginasEjercicios ElectroneumáticaNestor Camilo Beltran AvilaAún no hay calificaciones
- Introduccion A La Electronica de Potenci PDFDocumento25 páginasIntroduccion A La Electronica de Potenci PDFjose 99Aún no hay calificaciones
- Introduccion A La Electronica de Potenci PDFDocumento25 páginasIntroduccion A La Electronica de Potenci PDFjose 99Aún no hay calificaciones
- Parcial Tercer PuntoDocumento1 páginaParcial Tercer PuntoJorgeEliecerVillamilTorresAún no hay calificaciones
- Rectificadores NO Controlados PDFDocumento84 páginasRectificadores NO Controlados PDFJohn Milton Ascencio QuispeAún no hay calificaciones
- Rectificadores NO Controlados PDFDocumento84 páginasRectificadores NO Controlados PDFJohn Milton Ascencio QuispeAún no hay calificaciones
- 3er LAB MATERIALES - Ticora - BuitragoDocumento11 páginas3er LAB MATERIALES - Ticora - BuitragoJorgeEliecerVillamilTorresAún no hay calificaciones
- Segundo Lab PotenciaDocumento21 páginasSegundo Lab PotenciaJorgeEliecerVillamilTorresAún no hay calificaciones
- Laboratorio 3Documento11 páginasLaboratorio 3JorgeEliecerVillamilTorresAún no hay calificaciones
- Eduard Camilo Garcia Martinez MECANICA de FLUIDOSDocumento21 páginasEduard Camilo Garcia Martinez MECANICA de FLUIDOSJorgeEliecerVillamilTorresAún no hay calificaciones
- Parcial 1Documento37 páginasParcial 1JorgeEliecerVillamilTorresAún no hay calificaciones
- Formato Guía Actividad 2Documento5 páginasFormato Guía Actividad 2JorgeEliecerVillamilTorresAún no hay calificaciones
- Parcial 3 FundamentacionDocumento1 páginaParcial 3 FundamentacionJorgeEliecerVillamilTorresAún no hay calificaciones
- Taller 11 DinámicaDocumento2 páginasTaller 11 DinámicaJorgeEliecerVillamilTorresAún no hay calificaciones
- Instrucciones de Uso Del Recurso 1Documento1 páginaInstrucciones de Uso Del Recurso 1JorgeEliecerVillamilTorresAún no hay calificaciones
- Taller #1Documento17 páginasTaller #1JorgeEliecerVillamilTorresAún no hay calificaciones
- Taller Fluidos 2021-1Documento9 páginasTaller Fluidos 2021-1JorgeEliecerVillamilTorresAún no hay calificaciones
- Marcelo Santiago y Jorge VillamilDocumento16 páginasMarcelo Santiago y Jorge VillamilJorgeEliecerVillamilTorresAún no hay calificaciones
- Ejercico 1 3er Corte PDFDocumento1 páginaEjercico 1 3er Corte PDFJorgeEliecerVillamilTorresAún no hay calificaciones
- EJERCICIO DE DINÁMICA OPCIONAL Segundo Corte PDFDocumento1 páginaEJERCICIO DE DINÁMICA OPCIONAL Segundo Corte PDFJorgeEliecerVillamilTorresAún no hay calificaciones
- T12021IIDocumento3 páginasT12021IIJorgeEliecerVillamilTorresAún no hay calificaciones
- Analisis PDFDocumento3 páginasAnalisis PDFJorgeEliecerVillamilTorresAún no hay calificaciones
- CAPÍTULO 9 Iniciación A La Lectura y EscrituraDocumento37 páginasCAPÍTULO 9 Iniciación A La Lectura y EscriturajuanmahmAún no hay calificaciones
- Curso de Formacion de RiggerDocumento76 páginasCurso de Formacion de RiggerDixon Andres Cortes ValdesAún no hay calificaciones
- Ejercicios de estiramiento guía completaDocumento1 páginaEjercicios de estiramiento guía completaJuan Manuel OrtizAún no hay calificaciones
- Dictamen de NecropsiaDocumento5 páginasDictamen de Necropsiaale niw100% (1)
- Ceros Por Detrás de La CabezaDocumento7 páginasCeros Por Detrás de La CabezaJose R Gonzalez100% (1)
- Plan de Actividades de 6 A 9 Meses)Documento28 páginasPlan de Actividades de 6 A 9 Meses)EducalinaAún no hay calificaciones
- Reflejos Primitivos - Jaume VallsDocumento6 páginasReflejos Primitivos - Jaume VallsDresan PezloAún no hay calificaciones
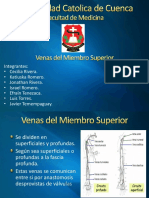
- Venas Del Miembro SuperiorDocumento17 páginasVenas Del Miembro SuperiorBetsy VacaAún no hay calificaciones
- Músculos Del HombroDocumento4 páginasMúsculos Del Hombroestefania ramirez cardonaAún no hay calificaciones
- Especificaciones Tecnicas 28 de OctubreDocumento118 páginasEspecificaciones Tecnicas 28 de OctubreMarlon Puma VisaAún no hay calificaciones
- El Masaje de Reestructuración. CompletoDocumento20 páginasEl Masaje de Reestructuración. CompletoMay1816Aún no hay calificaciones
- Cuestionario Anato Miembro SupDocumento10 páginasCuestionario Anato Miembro SupHector Adan Lozano PeñaAún no hay calificaciones
- Orden y DesplazamientoDocumento20 páginasOrden y Desplazamientoaismar silva100% (2)
- Yoga NidraDocumento3 páginasYoga NidraFrancesc Pàmies CruxentAún no hay calificaciones
- Glosario Del Sistema EsqueléticoDocumento14 páginasGlosario Del Sistema Esqueléticojhoalbert tesoreroAún no hay calificaciones
- Integración cívico-militar en la UNEFADocumento14 páginasIntegración cívico-militar en la UNEFAOscar MatamorosAún no hay calificaciones
- Anatomía OrtopediaDocumento42 páginasAnatomía OrtopediaJess BejaranoAún no hay calificaciones
- Banda Escuela - Power PointDocumento16 páginasBanda Escuela - Power Pointorlando castilloAún no hay calificaciones
- Libro de Ortesis (Parte II)Documento21 páginasLibro de Ortesis (Parte II)Enemias Perez AlarconAún no hay calificaciones
- La Guitarra Práctica - Eduardo CastañeraDocumento57 páginasLa Guitarra Práctica - Eduardo CastañeraGervasio SanchezAún no hay calificaciones
- 10 Sesiones de Baloncesto para Las Clases de Educación FísicaDocumento8 páginas10 Sesiones de Baloncesto para Las Clases de Educación FísicaJonatan Ulices Saldaña OlveraAún no hay calificaciones
- Números-Abecedario SEÑASDocumento9 páginasNúmeros-Abecedario SEÑASWilver Ovando ZamoraAún no hay calificaciones
- #2 The Blood Is LoveDocumento247 páginas#2 The Blood Is LoveMarly MesaAún no hay calificaciones
- Masoterapia TipeoDocumento34 páginasMasoterapia TipeosandhjAún no hay calificaciones
- Movilizaciones Pasivas de Miembro Superior e InferiorDocumento1 páginaMovilizaciones Pasivas de Miembro Superior e InferiorSteven GuallasaminAún no hay calificaciones
- Examen Físico Del Sistema UrinarioDocumento3 páginasExamen Físico Del Sistema UrinarioDanyHuayhuaGutiérrez100% (1)
- PLICOMETRIA ComnpuDocumento13 páginasPLICOMETRIA ComnpuPako Moreno GAún no hay calificaciones
- Introducción A La AntropometríaDocumento27 páginasIntroducción A La AntropometríaEdgar SarmientoAún no hay calificaciones
- PercusiónDocumento4 páginasPercusiónLuisCarlosPerezAlvaradoAún no hay calificaciones
- 26 Cierres La Fuente de La Vida - Es Slideshare Net 2Documento2 páginas26 Cierres La Fuente de La Vida - Es Slideshare Net 2Fernando Iglesias100% (1)