También podría gustarte
- Fsu DX200Documento158 páginasFsu DX200emmanuel baezAún no hay calificaciones
- Can OpenDocumento4 páginasCan OpenLydan Robles CañónAún no hay calificaciones
- Practica N. 04 KUKADocumento50 páginasPractica N. 04 KUKADiego Garzon100% (1)
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocumento12 páginasDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Clase de RoboticaDocumento119 páginasClase de RoboticaDavid GonzalesAún no hay calificaciones
- Series de FourierDocumento20 páginasSeries de Fourierloqui lloAún no hay calificaciones
- KawasakiDocumento162 páginasKawasakifranklin davidAún no hay calificaciones
- Robot KukaDocumento4 páginasRobot KukaVeronica Andrade GarciaAún no hay calificaciones
- Tutoriales Ros PDFDocumento23 páginasTutoriales Ros PDFVirginia Solorzano100% (1)
- M GX Works2 A Es XXXXXXDocumento110 páginasM GX Works2 A Es XXXXXXgersain arandaAún no hay calificaciones
- Examen de RoboticaDocumento7 páginasExamen de RoboticaIsmael Criollo ArevaloAún no hay calificaciones
- Control de Sistemas Mecánicos Subactuados PDFDocumento8 páginasControl de Sistemas Mecánicos Subactuados PDFIng Emisael AlarcónAún no hay calificaciones
- InfoPLC Net Configuracion VersaProDocumento24 páginasInfoPLC Net Configuracion VersaProROMAJUSTE1Aún no hay calificaciones
- 5 Practicas Robot Nachi PDFDocumento45 páginas5 Practicas Robot Nachi PDFPedro Bautista100% (1)
- Kuka MecanizadoDocumento17 páginasKuka MecanizadoAndres EspinosaAún no hay calificaciones
- Taller de Simulacion y Programación de Robots IndustrialesDocumento38 páginasTaller de Simulacion y Programación de Robots IndustrialesnessssaAún no hay calificaciones
- Lab6 1Documento8 páginasLab6 1dfgdfghb bfghdthdhAún no hay calificaciones
- Ejercicios PLC 1 y 2Documento9 páginasEjercicios PLC 1 y 2Joffre Calvopiña SegoviaAún no hay calificaciones
- PRÁCTICA #1 Robotica - 2020Documento24 páginasPRÁCTICA #1 Robotica - 2020JUAN ANTONIO MARQUEZ CORNEJOAún no hay calificaciones
- Descripcion General de RAPIDDocumento214 páginasDescripcion General de RAPIDEduardo LealAún no hay calificaciones
- Ejemplo 4Documento23 páginasEjemplo 4Abigail Santos PinedaAún no hay calificaciones
- Formulario Cálculo Sección Línea BT - v1Documento1 páginaFormulario Cálculo Sección Línea BT - v1hmor3100% (1)
- PTT Metodo CascadaDocumento13 páginasPTT Metodo CascadaSANTIAGO DAMASO RODRIGUEZ MARTINEZAún no hay calificaciones
- ABB - Manual de Referencia Tecnica - Parámetros Del SistemaDocumento722 páginasABB - Manual de Referencia Tecnica - Parámetros Del SistemaKaaAún no hay calificaciones
- Ejercicios AnalíticaDocumento7 páginasEjercicios Analíticadarwin069Aún no hay calificaciones
- 8 Cinematica Robots MovilesDocumento52 páginas8 Cinematica Robots MovilesJavier Luna Victoria WenzelAún no hay calificaciones
- Manual Del Usuario IRC5Documento408 páginasManual Del Usuario IRC5JunanAún no hay calificaciones
- Robot PumaDocumento9 páginasRobot PumaMily Emy YoAún no hay calificaciones
- Ejercicio Unidad 1Documento4 páginasEjercicio Unidad 186063142100% (1)
- Ejemplo Manual de InstalaciónDocumento24 páginasEjemplo Manual de InstalaciónAbelardo Willibaldo Ramírez GarcíaAún no hay calificaciones
- Practica#7Documento10 páginasPractica#7Alexiz CuAún no hay calificaciones
- Practica Abb 140Documento5 páginasPractica Abb 140Sara Ruiz TajueloAún no hay calificaciones
- Guía de Primeros Pasos Con CMMT-As-PN - Rev3Documento20 páginasGuía de Primeros Pasos Con CMMT-As-PN - Rev3Tomas GVAún no hay calificaciones
- Matrices de Transformación HomogéneaDocumento17 páginasMatrices de Transformación HomogéneaJhonatan Kevin OrozaAún no hay calificaciones
- J533-Programación Básica FANUC-KUKA PDFDocumento250 páginasJ533-Programación Básica FANUC-KUKA PDFesco 9008Aún no hay calificaciones
- Reglas DHDocumento4 páginasReglas DHFAUSTINO DE JESUS CRUZAún no hay calificaciones
- Control de Trayectoria de Manipulador Robótico de 4 GDLDocumento11 páginasControl de Trayectoria de Manipulador Robótico de 4 GDLjecamarenaq100% (1)
- 03-Formas Canonicas de RVEDocumento58 páginas03-Formas Canonicas de RVEctagmAún no hay calificaciones
- Arduino JDDocumento73 páginasArduino JDCarlos Sosa100% (1)
- Matrices de Transformacion HomogeneaDocumento13 páginasMatrices de Transformacion HomogeneaAbdel CaballeroAún no hay calificaciones
- Diagramas de Bode Con MatlabDocumento1 páginaDiagramas de Bode Con MatlabErwin Rojas100% (1)
- Control Del Móvimiento de Un Láser Con El PLC S7-200Documento62 páginasControl Del Móvimiento de Un Láser Con El PLC S7-200Marlon MontenegroAún no hay calificaciones
- Tranformada ZDocumento12 páginasTranformada ZNabile RodriguezAún no hay calificaciones
- Temario Cursos KukaDocumento4 páginasTemario Cursos KukaRaul RojasAún no hay calificaciones
- 2 Tutorial Programación Labview PDFDocumento83 páginas2 Tutorial Programación Labview PDFAngel Eduardo Cruzado NuñezAún no hay calificaciones
- Normalización de Funciones de Red - v2Documento1 páginaNormalización de Funciones de Red - v2Adolfo LladorAún no hay calificaciones
- ManualDocumento83 páginasManualCristina Miguélez100% (1)
- Temario Mecatronica 2°Documento2 páginasTemario Mecatronica 2°Jessi-Ham Carrillo100% (1)
- Cinematica InversaDocumento27 páginasCinematica InversaHector GuerreroAún no hay calificaciones
- B-81685ES - 02 - LRM 200ibDocumento226 páginasB-81685ES - 02 - LRM 200ibManuel Gil BotiaAún no hay calificaciones
- P1 Lab RoboticaDocumento5 páginasP1 Lab Roboticagian123Aún no hay calificaciones
- EjerciciosDocumento3 páginasEjerciciosjorgeAún no hay calificaciones
- Cinematica-Robot PUMADocumento1 páginaCinematica-Robot PUMADenise Chaves RodasAún no hay calificaciones
- Cinematica Directa Del Robot Kuka KR 5 Sixx r851Documento10 páginasCinematica Directa Del Robot Kuka KR 5 Sixx r851MonsserathAún no hay calificaciones
- Traduccion de Theory Applied RoboticsDocumento74 páginasTraduccion de Theory Applied RoboticsKenny Torres LunaAún no hay calificaciones
- Ejercicio DHDocumento5 páginasEjercicio DHAlex Atao EnriquezAún no hay calificaciones
- Campos Vectoriales en Sistemas CoordenadosDocumento21 páginasCampos Vectoriales en Sistemas CoordenadosJefferson Ruano BolañosAún no hay calificaciones
- Denavit HartenbergDocumento6 páginasDenavit HartenbergchendoAún no hay calificaciones
- Algoritmo de Denavit HartenbergDocumento6 páginasAlgoritmo de Denavit HartenbergGil Robles LoyaAún no hay calificaciones
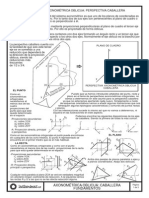
- CaballeraDocumento3 páginasCaballeraCarmen Orozco de PáramoAún no hay calificaciones
- Aca EstaDocumento15 páginasAca EstaLuis Fernandez RamosAún no hay calificaciones
- Función SecanteDocumento10 páginasFunción SecanteBeat Car100% (1)
- Plano 04Documento1 páginaPlano 04Jhon RodriguezAún no hay calificaciones
- CONCENTRADOR ENSAMBLE Abierto PlanoDocumento1 páginaCONCENTRADOR ENSAMBLE Abierto PlanoJhon RodriguezAún no hay calificaciones
- Plano Eléctrico Faja 01.1Documento1 páginaPlano Eléctrico Faja 01.1Jhon RodriguezAún no hay calificaciones
- Acoplamientos ESP PDFDocumento20 páginasAcoplamientos ESP PDFJhon RodriguezAún no hay calificaciones
- S14.s1 - Material - HipérbolaDocumento19 páginasS14.s1 - Material - HipérbolaEderAún no hay calificaciones
- CartografiamatematicaDocumento493 páginasCartografiamatematicaTacho salazarAún no hay calificaciones
- 4 - Derivada DireccionalDocumento34 páginas4 - Derivada DireccionalAgustin VargasAún no hay calificaciones
- Semana12 ParabolaDocumento7 páginasSemana12 ParabolaAnii Silva100% (1)
- Material 3Documento17 páginasMaterial 3Alan ArevaloAún no hay calificaciones
- Cartografia PDFDocumento16 páginasCartografia PDFVanessa BoteroAún no hay calificaciones
- Integral Doble y Triple Fime 2018 BDocumento3 páginasIntegral Doble y Triple Fime 2018 BJuanAún no hay calificaciones
- Vectores en El PlanoDocumento3 páginasVectores en El PlanoIlbar JohnnyAún no hay calificaciones
- EjerciciosDocumento6 páginasEjerciciosDinamar83Aún no hay calificaciones
- 18CAPITULO 11. ReplanteoDocumento9 páginas18CAPITULO 11. ReplanteoGary Jonathan Morales Alvarado100% (1)
- Ecuacion de La HiperbolaDocumento10 páginasEcuacion de La HiperbolaLesly TejadaAún no hay calificaciones
- Superficies CuadricasDocumento11 páginasSuperficies CuadricasIsabellaAún no hay calificaciones
- Sustentación Trabajo Colaborativo Calculo 3Documento4 páginasSustentación Trabajo Colaborativo Calculo 3Maria camila0% (1)
- La ParabolaDocumento17 páginasLa ParabolasaraAún no hay calificaciones
- DEBER 1 Áreas Figuras Planas RectangularesDocumento2 páginasDEBER 1 Áreas Figuras Planas RectangularesScraily_abgAún no hay calificaciones
- TallerApsGeomMat IVDocumento6 páginasTallerApsGeomMat IVJuan Sebastian Lopez SuarezAún no hay calificaciones
- ArtematicaDocumento14 páginasArtematicaJoyce Leyva (Ceyjo)Aún no hay calificaciones
- Guia 1 Pep2 Derivacion Recta Tangente y NormalDocumento10 páginasGuia 1 Pep2 Derivacion Recta Tangente y NormalClaudia RománAún no hay calificaciones
- Coordenadas Polares - UAP-Abel Cruz Suyoc - Ing Civil.Documento42 páginasCoordenadas Polares - UAP-Abel Cruz Suyoc - Ing Civil.Salim Abel67% (3)
- TFG Carlos GomezDocumento88 páginasTFG Carlos GomezRoberto SastreAún no hay calificaciones
- Ejercicios PolaresDocumento7 páginasEjercicios PolaresRodrigolopezchalaAún no hay calificaciones
- 5s Ivb 2023 Geometría MaDocumento85 páginas5s Ivb 2023 Geometría MadejolionelAún no hay calificaciones
- Ejercicios CoordenadasDocumento3 páginasEjercicios CoordenadasBraYan Lagunas ToLedoAún no hay calificaciones
- MA1003 Examenes 10 IIDocumento4 páginasMA1003 Examenes 10 IIGEORGE AR�MIS VASQUEZ LLANOSAún no hay calificaciones
- La ParábolaDocumento3 páginasLa ParábolaAbrahan CruzAún no hay calificaciones
- Calculo BinarioDocumento3 páginasCalculo BinarioAntonio CMAún no hay calificaciones
- CÓNICAS JuandaaaaDocumento6 páginasCÓNICAS JuandaaaaLeonardo Mendez PerezAún no hay calificaciones