También podría gustarte
- Revisión Del Documento Claves para Un Rodamiento Perfecto - P21Documento16 páginasRevisión Del Documento Claves para Un Rodamiento Perfecto - P21Lubrication´s RoomAún no hay calificaciones
- Cronograma Proyecto ICML 55 Avance 06 01 23 ExternoDocumento6 páginasCronograma Proyecto ICML 55 Avance 06 01 23 ExternoGonzalo FioriloAún no hay calificaciones
- T Ribologia 2020Documento252 páginasT Ribologia 2020Julio Alberto Cornejo100% (1)
- Laboratorio de ViscocidadDocumento13 páginasLaboratorio de ViscocidadLuis EspinozaAún no hay calificaciones
- Fundamentos de Teoría Matemática de Ingeniería de Confiabilidad. Parte 1Documento41 páginasFundamentos de Teoría Matemática de Ingeniería de Confiabilidad. Parte 1Alvaro Santa Cruz DiazAún no hay calificaciones
- Tarea N°5 Esfuerzo Normal y CortanteDocumento27 páginasTarea N°5 Esfuerzo Normal y CortanteSebastian Calle ReyAún no hay calificaciones
- MLA II Information SpanishDocumento5 páginasMLA II Information SpanishmanuelAún no hay calificaciones
- Sandra Castro Normas Astm EspañolDocumento161 páginasSandra Castro Normas Astm EspañolctimanaAún no hay calificaciones
- Gerens-Reemplazo de Equipos 2Documento27 páginasGerens-Reemplazo de Equipos 2GIANCARLOAún no hay calificaciones
- 2 Control de Contaminacion TBDocumento43 páginas2 Control de Contaminacion TBWilberth Jhon Tapia MaqueraAún no hay calificaciones
- Normas API 614 y AceaDocumento8 páginasNormas API 614 y AceaDavid S. GutierrezAún no hay calificaciones
- Diplomado en Lubricacion de Clase Mundial en Linea Nivel 2Documento7 páginasDiplomado en Lubricacion de Clase Mundial en Linea Nivel 2Esteban Fernando Meza IbacetaAún no hay calificaciones
- Comportamiento Viscoso Del Lubricante en Una Bomba Centrifuga Bipartida Worthington LN Determina Al Tipo de Lubricacion Completa o ViscosaDocumento43 páginasComportamiento Viscoso Del Lubricante en Una Bomba Centrifuga Bipartida Worthington LN Determina Al Tipo de Lubricacion Completa o ViscosaAliaga Garcia WalterAún no hay calificaciones
- Arbol de FallaDocumento11 páginasArbol de FallaGerman David Medina MartinezAún no hay calificaciones
- TRIBOLOGIA de La LubricacionDocumento16 páginasTRIBOLOGIA de La LubricacionBriggitte Stephany Ortiz SanchezAún no hay calificaciones
- Sistema Tribológico Norma Din 50.320Documento13 páginasSistema Tribológico Norma Din 50.320marinaAún no hay calificaciones
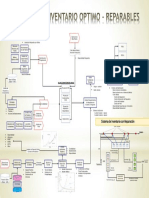
- Diagrama Inventario ReparablesDocumento1 páginaDiagrama Inventario ReparablesMarcel BaqueAún no hay calificaciones
- Boleta RTV 2016-107Documento2 páginasBoleta RTV 2016-107Wilfredo Ferman MejiaAún no hay calificaciones
- ANALISIS MODO Turbinas Vapor Juan A VillcaDocumento8 páginasANALISIS MODO Turbinas Vapor Juan A VillcaedwinsazzzAún no hay calificaciones
- Guia de Diseño para Calcular El DesgasteDocumento7 páginasGuia de Diseño para Calcular El DesgasteRuben PurcaAún no hay calificaciones
- Formatos de CriticidadDocumento4 páginasFormatos de CriticidadKenyi GarciaAún no hay calificaciones
- Lup - Verificacion de Parametros Antes Del EnvasadoDocumento1 páginaLup - Verificacion de Parametros Antes Del EnvasadoJorge AndresAún no hay calificaciones
- Presentacion Tribologia Clase IDocumento12 páginasPresentacion Tribologia Clase IWilliamsGerardoRondonAún no hay calificaciones
- Estrategias de Mantenimiento - PDFDocumento19 páginasEstrategias de Mantenimiento - PDFEdgarAún no hay calificaciones
- Herramientas para Analisis de Datos de Fallas - PDF - OCRDocumento6 páginasHerramientas para Analisis de Datos de Fallas - PDF - OCRrarqqueAún no hay calificaciones
- Lubricación y LubricantesDocumento11 páginasLubricación y LubricantesPiter NcAún no hay calificaciones
- MANUAL - SAP-PM - 05 Estrategia de MantenimientoDocumento3 páginasMANUAL - SAP-PM - 05 Estrategia de MantenimientoFranklin Cruz PatricioAún no hay calificaciones
- Consultoría Técnica Sobre Mantenimiento Predictivo Multiparamétrico en Grupos ElectrógenosDocumento24 páginasConsultoría Técnica Sobre Mantenimiento Predictivo Multiparamétrico en Grupos ElectrógenoscesarAún no hay calificaciones
- Sistemas ReparablesDocumento37 páginasSistemas ReparablesDUR�N PINO VALENTINA JAVIERA100% (1)
- AMEF TVDocumento16 páginasAMEF TVMai LineroAún no hay calificaciones
- Espuma en El LubricanteDocumento3 páginasEspuma en El LubricanteGina VegaAún no hay calificaciones
- t-056-i-1109-AFA2019-2 - Informe Técnico - Inspección Visual - PiñonDocumento6 páginast-056-i-1109-AFA2019-2 - Informe Técnico - Inspección Visual - PiñonChristian SantillanAún no hay calificaciones
- Presentación Lubricacion para GM Colombia 2012. TritechDocumento126 páginasPresentación Lubricacion para GM Colombia 2012. TritechFredy Alexander Gamboa Ochoa100% (1)
- Evaluación de La Aplicabilidad de Modelos de Machine Learning para Predecir Riesgos de Impago.Documento43 páginasEvaluación de La Aplicabilidad de Modelos de Machine Learning para Predecir Riesgos de Impago.Álvaro Pena VaqueroAún no hay calificaciones
- Grasa Complejo de Calcio UsosDocumento4 páginasGrasa Complejo de Calcio Usoscarbk100% (1)
- 2006-Analisis de Falla de Un Agitador para Tratamiento de AguaDocumento6 páginas2006-Analisis de Falla de Un Agitador para Tratamiento de AguaRamonMartinezAún no hay calificaciones
- Act. 3.2 Descripción Detallada de La Tabla AMEF.Documento19 páginasAct. 3.2 Descripción Detallada de La Tabla AMEF.Miguel Ángel Angulo Pérez100% (1)
- Listado de Transacciones - WeirDocumento9 páginasListado de Transacciones - WeirEdwin Calderón PizarroAún no hay calificaciones
- Examen de Ingeniería de Confiabilidad ResueltoDocumento7 páginasExamen de Ingeniería de Confiabilidad ResueltoPablo Grosskelwing0% (1)
- Asesoría - Primer ExamenDocumento4 páginasAsesoría - Primer Examenjo mAún no hay calificaciones
- Averias en Motores de Gas Vol1Documento24 páginasAverias en Motores de Gas Vol1CDAMNUAún no hay calificaciones
- Determinación de Código ISO (Partículas en Aceites)Documento8 páginasDeterminación de Código ISO (Partículas en Aceites)Santiago GontaAún no hay calificaciones
- Clase 6Documento30 páginasClase 6Eder Cruz100% (1)
- Problemas Resueltos de EstadísticaDocumento3 páginasProblemas Resueltos de EstadísticaKarla VillanuevaAún no hay calificaciones
- Análisis de Vibración de Rodamientos y Cajas de Engranajes Usando Técnicas de Demodulación - (Parte 2) - Prosig Noise & Vibration BlogDocumento8 páginasAnálisis de Vibración de Rodamientos y Cajas de Engranajes Usando Técnicas de Demodulación - (Parte 2) - Prosig Noise & Vibration BlogOdlanier José MendozaAún no hay calificaciones
- Tribología - ASMEDocumento25 páginasTribología - ASMESantosCalaniGonzalesAún no hay calificaciones
- Acero 4140 TempladoDocumento4 páginasAcero 4140 TempladolucasAún no hay calificaciones
- Acumulacion de Tolerancias y Acabado SuperficialDocumento15 páginasAcumulacion de Tolerancias y Acabado SuperficialKeymakerartAún no hay calificaciones
- TribologíaDocumento62 páginasTribologíadaliAún no hay calificaciones
- El Índice de ViscosidadDocumento6 páginasEl Índice de ViscosidadJonh Cvd MoralsAún no hay calificaciones
- Unidad 9 PDFDocumento99 páginasUnidad 9 PDFRonaldo Sebastian ZeballosAún no hay calificaciones
- Análisis de AceiteDocumento37 páginasAnálisis de AceiteGonzalo FioriloAún no hay calificaciones
- Exponencial y Weibull PDFDocumento12 páginasExponencial y Weibull PDFBerinssonScottHernandezSucsoAún no hay calificaciones
- Distribucion de WeibullDocumento10 páginasDistribucion de WeibullJoe LynchAún no hay calificaciones
- Conceptos Basicos de ConfiabilidadDocumento8 páginasConceptos Basicos de ConfiabilidadRafa LopezAún no hay calificaciones
- 3.1 Fiabilidad MatemáticaDocumento50 páginas3.1 Fiabilidad MatemáticaJulio TapiaAún no hay calificaciones
- Tema 06 - 00 Evaluación Técnica Del MantenimientoDocumento51 páginasTema 06 - 00 Evaluación Técnica Del MantenimientoAlejandroAún no hay calificaciones
- Documento Taller WeibullDocumento17 páginasDocumento Taller WeibullJeinner CastroAún no hay calificaciones
- Fiabilidad de EquiposDocumento17 páginasFiabilidad de EquiposOmarAún no hay calificaciones
- Controladores ACDocumento6 páginasControladores ACRebeca Alexandra TimaureAún no hay calificaciones
- IpTV EN VENEZUELA PDFDocumento7 páginasIpTV EN VENEZUELA PDFkertesz25Aún no hay calificaciones
- Capitulo 2Documento17 páginasCapitulo 2Marcela OrellanaAún no hay calificaciones
- Manual de Aleman PDFDocumento46 páginasManual de Aleman PDFmartin_rivero_valdezAún no hay calificaciones
- Apuntes de AlemanDocumento68 páginasApuntes de Alemanrunaway_bj4ever100% (6)
- Radio Enlace Ceragon Fibeair IP-10-SpecsDocumento44 páginasRadio Enlace Ceragon Fibeair IP-10-Specsaralso71% (7)
- Conviértete en Un Horno Quema Grasa TBEC Fitness PlaybookDocumento6 páginasConviértete en Un Horno Quema Grasa TBEC Fitness PlaybookRebeca Alexandra TimaureAún no hay calificaciones
- 5 Claves para Una Imagen Profesional de XitoDocumento16 páginas5 Claves para Una Imagen Profesional de XitoRebeca Alexandra TimaureAún no hay calificaciones
- Tu Año Mas ExitosoDocumento28 páginasTu Año Mas Exitososilvana77100% (2)
- Tema 4 - VZHKDocumento14 páginasTema 4 - VZHKJennifer LemaAún no hay calificaciones
- Actividad 3. CuestionarioDocumento6 páginasActividad 3. CuestionarioAdolfo Anota PerezAún no hay calificaciones
- Trabajo de Investigacion Sobre Supuestos de NormalidadDocumento29 páginasTrabajo de Investigacion Sobre Supuestos de Normalidadmario capdevillaAún no hay calificaciones
- Distribuciones de MuestreoDocumento66 páginasDistribuciones de MuestreoFabian Andres Urbina ForeroAún no hay calificaciones
- Estadistica IDocumento2 páginasEstadistica IEdgar BolañosAún no hay calificaciones
- Actividad de Puntos Evaluables - Estadistica 5Documento3 páginasActividad de Puntos Evaluables - Estadistica 5Diego BravoAún no hay calificaciones
- Unidad 2 Diseño Con Un Solo FactorDocumento55 páginasUnidad 2 Diseño Con Un Solo Factoradanromero100% (1)
- Espacio MuestralDocumento10 páginasEspacio MuestralHeiderAún no hay calificaciones
- Punto Cero: Población Muestra Y MuestreoDocumento7 páginasPunto Cero: Población Muestra Y MuestreooborjascAún no hay calificaciones
- Tarea 2 Estadistica y ProbabilidadDocumento39 páginasTarea 2 Estadistica y ProbabilidadpaolaAún no hay calificaciones
- Ejercicios Propuestos 01 SolucionarioDocumento4 páginasEjercicios Propuestos 01 SolucionarioFiorellaAún no hay calificaciones
- Modulo Psicolo 1 y 3Documento18 páginasModulo Psicolo 1 y 3DavidMorenoRuizAún no hay calificaciones
- Clase Modelos DicotomosDocumento67 páginasClase Modelos DicotomosKimberly HughesAún no hay calificaciones
- Tarea 2Documento9 páginasTarea 2Robert Salazar QuispeAún no hay calificaciones
- Transformacion de DatosDocumento19 páginasTransformacion de DatosmismaelwAún no hay calificaciones
- 1-Preliminares La Distribucion NormalDocumento18 páginas1-Preliminares La Distribucion Normal94357839Aún no hay calificaciones
- Capitulo Estimacion PDFDocumento16 páginasCapitulo Estimacion PDFRojasMaritza100% (1)
- PRÁCTICA 1 MUESTREO INFERENCIA Alma PDFDocumento3 páginasPRÁCTICA 1 MUESTREO INFERENCIA Alma PDFJohana Morales100% (1)
- -Documento21 páginas-Cristian Daniel CORAL SANCHEZAún no hay calificaciones
- Prueba de Hipotesis x1 y x2Documento15 páginasPrueba de Hipotesis x1 y x2Valentin Balderas0% (1)
- Distribucion GeometricaDocumento7 páginasDistribucion GeometricacadcivilAún no hay calificaciones
- Producto Académico #02Documento7 páginasProducto Académico #02cristian salvatierraAún no hay calificaciones
- Guia 5 SoluciónDocumento11 páginasGuia 5 SoluciónLuciana Vidalon UrtechoAún no hay calificaciones
- 3.4 Prueba de Hipótesis para La ProporciónDocumento25 páginas3.4 Prueba de Hipótesis para La ProporciónStReyita JaNeth OrtgaAún no hay calificaciones
- Distribucion Uniforme ContinuaDocumento20 páginasDistribucion Uniforme ContinuaMónica Mantilla HidalgoAún no hay calificaciones
- Solucionariofinal 140417225717 Phpapp02 PDFDocumento36 páginasSolucionariofinal 140417225717 Phpapp02 PDFJocelyn Mireles SanvicenteAún no hay calificaciones
- Estado Del Arte ANOVADocumento8 páginasEstado Del Arte ANOVABenjamín CastilloAún no hay calificaciones
- Casos PrácticosDocumento9 páginasCasos PrácticosRonaldo GarcíaAún no hay calificaciones
- Trabajo de EstadisticaDocumento7 páginasTrabajo de Estadisticaivan andres jimenez poloAún no hay calificaciones