También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Adm Finanzas 2-1Documento18 páginasAdm Finanzas 2-1mileystefitahAún no hay calificaciones
- Curso Hidráulica Básica PDFDocumento98 páginasCurso Hidráulica Básica PDFDbo27Aún no hay calificaciones
- Resultados de La Investigación PDFDocumento6 páginasResultados de La Investigación PDFLinda Melo TicseAún no hay calificaciones
- Laboratorio 10Documento6 páginasLaboratorio 10Miguel Angel Hernández JuárezAún no hay calificaciones
- Estructuras Hidraulicas AforadoresDocumento7 páginasEstructuras Hidraulicas AforadoresMax Escalante SareAún no hay calificaciones
- Escenarios PDFDocumento24 páginasEscenarios PDFDaniel DiazAún no hay calificaciones
- Semana 10-Formato Análogo-Sombras Arrojadas. - Arq. Ruth FrancoDocumento62 páginasSemana 10-Formato Análogo-Sombras Arrojadas. - Arq. Ruth FrancoMario CalvisiAún no hay calificaciones
- Problemas Resueltos Cortocircuitos AsimetricosDocumento10 páginasProblemas Resueltos Cortocircuitos AsimetricosCarlos GustavoAún no hay calificaciones
- FA19-20 ENC Enero Sol SDocumento18 páginasFA19-20 ENC Enero Sol SÓscar LudeñaAún no hay calificaciones
- Monografia Turbomaquinas AvanceDocumento13 páginasMonografia Turbomaquinas AvanceRivera Untiveros Erick EddyAún no hay calificaciones
- Lab 8 Control2 UltimoDocumento17 páginasLab 8 Control2 UltimoJohn Edgard Canahua UchasaraAún no hay calificaciones
- Problema Clase 3Documento5 páginasProblema Clase 3lol jajaAún no hay calificaciones
- Laboratorio 5. Conversión Delta-EstrellaDocumento10 páginasLaboratorio 5. Conversión Delta-EstrellaEdgar MirandaAún no hay calificaciones
- Aporte 2 Fase 2 C.ADocumento16 páginasAporte 2 Fase 2 C.AWilmer SosaAún no hay calificaciones
- Error Estado Estacionario y K CriticoDocumento20 páginasError Estado Estacionario y K CriticojohnpalominopAún no hay calificaciones
- Informe Control Robusto II - NewDocumento21 páginasInforme Control Robusto II - NewCarmen Rosa Amau Quispe0% (1)
- T4 Programación LinealDocumento6 páginasT4 Programación LinealalastorblakekunAún no hay calificaciones
- 2020 - Criterio Routh-Hurwitz PDFDocumento14 páginas2020 - Criterio Routh-Hurwitz PDFJuanAldairRiveraDueñasAún no hay calificaciones
- Método Root LocusDocumento43 páginasMétodo Root LocusNicolas David Cabanillas AraujoAún no hay calificaciones
- Ejercicios de HibridosDocumento22 páginasEjercicios de HibridosDaniel Marcelo Veliz RicardiAún no hay calificaciones
- 1 5107213519401518323Documento15 páginas1 5107213519401518323Andres MoraAún no hay calificaciones
- Compensadores Lugar Geometrico de RaicesDocumento15 páginasCompensadores Lugar Geometrico de RaicesAnonymous SfF48z3NAún no hay calificaciones
- Sef Ee615m-N 2019-1Documento7 páginasSef Ee615m-N 2019-1Jorge Luis Espinoza BardalesAún no hay calificaciones
- Aub 130612 RDocumento12 páginasAub 130612 RAlejandro Díaz ReigAún no hay calificaciones
- Ejercicio 1 Unidad 2Documento4 páginasEjercicio 1 Unidad 2Oscar Augusto Cabrera RomeroAún no hay calificaciones
- Técnicas Clásicas de ControlDocumento9 páginasTécnicas Clásicas de ControlNestor Eduardo Polania Vargas100% (1)
- Control OptimoDocumento62 páginasControl OptimoJean Pierre Alcantara AlvaradoAún no hay calificaciones
- GRUPO16 Hender Acuña Tarea2 CADocumento16 páginasGRUPO16 Hender Acuña Tarea2 CAHenderAún no hay calificaciones
- Root LocusDocumento37 páginasRoot LocusArturo Arévalo FloresAún no hay calificaciones
- Ramirez Alexis Preparatorio1aDocumento19 páginasRamirez Alexis Preparatorio1aAlexis RamirezAún no hay calificaciones
- Prueba 1 (Suspensión Activa) PDFDocumento8 páginasPrueba 1 (Suspensión Activa) PDFEve QuillupanguiAún no hay calificaciones
- Teoria de Dualidad y Analisis de SensibilidadDocumento24 páginasTeoria de Dualidad y Analisis de SensibilidadSlevin KelevraAún no hay calificaciones
- Sciladores ColpittsDocumento36 páginasSciladores ColpittsRosa SalvadorAún no hay calificaciones
- Com 09Documento8 páginasCom 09pepillo2013Aún no hay calificaciones
- PEP 3 2022 PautaDocumento9 páginasPEP 3 2022 PautaGonzaloAún no hay calificaciones
- Control PD para Seguidor de LineaDocumento11 páginasControl PD para Seguidor de LineaAbraham Candelaria100% (1)
- Tercera Práctica Calificada de Control IDocumento6 páginasTercera Práctica Calificada de Control Idaniel garcia garcia100% (1)
- EL218 Unidad 4a Diseño de Compensadores 2023-2Documento33 páginasEL218 Unidad 4a Diseño de Compensadores 2023-2Susan Nicold TapiaAún no hay calificaciones
- Primer Parcial Electricos SolucionDocumento5 páginasPrimer Parcial Electricos SolucionAurelio MartellAún no hay calificaciones
- OCW Juntas Univ-1Documento52 páginasOCW Juntas Univ-1FiorellaRojasAún no hay calificaciones
- F (X) F F (X) : Ejercicio 1.-A Continuación Se Muestra El Pseudocódigo Correspondiente A Un Método deDocumento42 páginasF (X) F F (X) : Ejercicio 1.-A Continuación Se Muestra El Pseudocódigo Correspondiente A Un Método deKarla AlcivarAún no hay calificaciones
- Parcial Practico N°3: Métodos NuméricosDocumento14 páginasParcial Practico N°3: Métodos NuméricosCristianAún no hay calificaciones
- Problemas Root LocusDocumento4 páginasProblemas Root LocusNicolas David Cabanillas AraujoAún no hay calificaciones
- Peps 1 Calculo AvanzadoDocumento83 páginasPeps 1 Calculo AvanzadoAlejandro Ponce ArayaAún no hay calificaciones
- Compensadores AdelantoDocumento33 páginasCompensadores AdelantoeibygvAún no hay calificaciones
- Informeprevio 7 DigitalesDocumento13 páginasInformeprevio 7 DigitalesLUCERO ALEXANDRA CORAL TAIPEAún no hay calificaciones
- Semestral UniDocumento11 páginasSemestral UniLuis CabanillasAún no hay calificaciones
- Pauta Certamen 2 Modelación y Análisis de Sistemas Eléctricos de Potencia - 15-07-2022 15 CopiasDocumento5 páginasPauta Certamen 2 Modelación y Análisis de Sistemas Eléctricos de Potencia - 15-07-2022 15 CopiascsegueljAún no hay calificaciones
- Taller 1 PLG1Documento24 páginasTaller 1 PLG1Diego RodriguezAún no hay calificaciones
- 2 Problemas Resueltos de Control de Sistemas Continuos Con ScilabDocumento25 páginas2 Problemas Resueltos de Control de Sistemas Continuos Con ScilabArmando Ramírez C0% (1)
- Filtro Pasabanda 1khzDocumento11 páginasFiltro Pasabanda 1khzAlejandroAlvearEspinozaAún no hay calificaciones
- Vega Izaguirre DanielDocumento15 páginasVega Izaguirre DanielLuis CondoAún no hay calificaciones
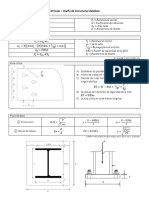
- Fórmulas - Diseño de Estructuras MetálicasDocumento5 páginasFórmulas - Diseño de Estructuras MetálicasCesar SantosAún no hay calificaciones
- Compensador Adelanto y AtrasoDocumento11 páginasCompensador Adelanto y AtrasoBen DerAún no hay calificaciones
- Examen 06 Peralta Vega Yhon CristianDocumento13 páginasExamen 06 Peralta Vega Yhon CristianYhon Cristian Peralta VegaAún no hay calificaciones
- Circuito Tanque 1Documento16 páginasCircuito Tanque 1Darren KnappAún no hay calificaciones
- 2 PC Ingeniería Geotécnica CV61 2022 IDocumento5 páginas2 PC Ingeniería Geotécnica CV61 2022 IBruno CcahuanaAún no hay calificaciones
- Tema 6Documento13 páginasTema 6Kleisder CalderonAún no hay calificaciones
- Bode Margene SDocumento8 páginasBode Margene Schecom3Aún no hay calificaciones
- 4 - Transformada de Laplace y Funciòn de TransferenciaDocumento14 páginas4 - Transformada de Laplace y Funciòn de TransferenciaEsequiel PerezAún no hay calificaciones
- Reporte P3 John PozoDocumento20 páginasReporte P3 John PozoJohn Andrés Pozo VillónAún no hay calificaciones
- Ejercicios FenómenosdetransporteDocumento2 páginasEjercicios FenómenosdetransporteÓscar LudeñaAún no hay calificaciones
- Moodle 2 Preguntas de Teoria 2Documento7 páginasMoodle 2 Preguntas de Teoria 2Óscar LudeñaAún no hay calificaciones
- Intensivo-Maquinas ElectricasDocumento24 páginasIntensivo-Maquinas ElectricasÓscar LudeñaAún no hay calificaciones
- PEC 1 y 2 TEORIADocumento13 páginasPEC 1 y 2 TEORIAÓscar LudeñaAún no hay calificaciones
- 2020 21 Enero201Documento5 páginas2020 21 Enero201Óscar LudeñaAún no hay calificaciones
- Problemas MEDocumento22 páginasProblemas MEÓscar LudeñaAún no hay calificaciones
- 03 Ordinario 2020 - 01 - 10 - InfeDocumento4 páginas03 Ordinario 2020 - 01 - 10 - InfeÓscar LudeñaAún no hay calificaciones
- Pec 2 Prueba EduDocumento6 páginasPec 2 Prueba EduÓscar LudeñaAún no hay calificaciones
- Ejercicios Tema 4Documento1 páginaEjercicios Tema 4Óscar LudeñaAún no hay calificaciones
- Ejers Extra Pec2Documento7 páginasEjers Extra Pec2Óscar LudeñaAún no hay calificaciones
- 2020 21 Pec2 SolDocumento6 páginas2020 21 Pec2 SolÓscar LudeñaAún no hay calificaciones
- Examen de Prueba PEC2 - 2021Documento1 páginaExamen de Prueba PEC2 - 2021Óscar LudeñaAún no hay calificaciones
- Teoria de ConteoDocumento8 páginasTeoria de ConteoculturaemdeclmAún no hay calificaciones
- ACTIVIDAD INDIVIDUAL - Ejer - #3.Documento9 páginasACTIVIDAD INDIVIDUAL - Ejer - #3.LUIS EDUARDOAún no hay calificaciones
- Programación Anual Cta. 2°Documento14 páginasProgramación Anual Cta. 2°maritzaAún no hay calificaciones
- 04 - Trigonometria - Ángulos en Posicion Normal PDFDocumento1 página04 - Trigonometria - Ángulos en Posicion Normal PDFDaniel Agramonte RondoyAún no hay calificaciones
- Iperc Teoria y Aplicacion Minera VOLCAN1Documento8 páginasIperc Teoria y Aplicacion Minera VOLCAN1Marco Antonio CQAún no hay calificaciones
- Reglamento para La Seguridad Estructural de Las ConstruccionesDocumento19 páginasReglamento para La Seguridad Estructural de Las ConstruccionesHerbert RacAún no hay calificaciones
- Taller 2 de EDO S (Septiembre 12 de 2016)Documento3 páginasTaller 2 de EDO S (Septiembre 12 de 2016)Miguel BeltránAún no hay calificaciones
- Guía 04 Líneas Trigonométricas, Ángulo de Más de 90°4Documento11 páginasGuía 04 Líneas Trigonométricas, Ángulo de Más de 90°4Daniel GómezAún no hay calificaciones
- Asignación GPI 3Documento5 páginasAsignación GPI 3yorAún no hay calificaciones
- $RK0B45PDocumento135 páginas$RK0B45PAlejandra ChavezAún no hay calificaciones
- Guia03IAI2019 2.0Documento18 páginasGuia03IAI2019 2.0Henry Alexis Alvarado SerranoAún no hay calificaciones
- Ejercicios de Funcion LinealDocumento8 páginasEjercicios de Funcion LinealHECTORAún no hay calificaciones
- Practica 4Documento13 páginasPractica 4Diego MartinezAún no hay calificaciones
- PATDocumento2 páginasPATJORGE LUIS MUÑOZ LINARESAún no hay calificaciones
- Practica Ford FulkersonDocumento26 páginasPractica Ford FulkersonReparacion and ElectronicaAún no hay calificaciones
- ConversionesDocumento7 páginasConversionesDark DraftsmanAún no hay calificaciones
- Cinemática y DinámicaDocumento11 páginasCinemática y DinámicaAldair Ü CalderónAún no hay calificaciones
- Matemática 1 Guía Anual 4 2023 - 16Documento3 páginasMatemática 1 Guía Anual 4 2023 - 16Alex gugolAún no hay calificaciones
- Funciones VeritativasDocumento9 páginasFunciones VeritativasAnonymous pf2X9EZARHAún no hay calificaciones
- Planeaciones Pensamiento MatemáticoDocumento3 páginasPlaneaciones Pensamiento MatemáticoEli AguilarAún no hay calificaciones
- Proyecto EcuacionesDocumento6 páginasProyecto EcuacionesCarlos Mario Hidalgo BecerraAún no hay calificaciones
- T - Sem3 - F - Dinámica Lineal. RozamientoDocumento2 páginasT - Sem3 - F - Dinámica Lineal. Rozamientosandra shirley camayo de la cruzAún no hay calificaciones
- MODELO ProyectilesDocumento5 páginasMODELO ProyectilesKarla MartinezAún no hay calificaciones