También podría gustarte
- Vitaminas LDocumento19 páginasVitaminas Ljesus alejandroAún no hay calificaciones
- ProteinasDocumento17 páginasProteinasjesus alejandroAún no hay calificaciones
- Problemas Unidad 2Documento2 páginasProblemas Unidad 2jesus alejandroAún no hay calificaciones
- Practica 2 ControlDocumento14 páginasPractica 2 Controljesus alejandroAún no hay calificaciones
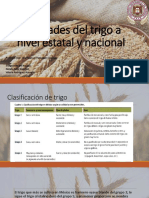
- Variedades Del Trigo A Nivel Estatal y NacionalDocumento12 páginasVariedades Del Trigo A Nivel Estatal y Nacionaljesus alejandroAún no hay calificaciones
- TrigoDocumento5 páginasTrigojesus alejandroAún no hay calificaciones
- Molinos de Trigo MéxicoDocumento14 páginasMolinos de Trigo Méxicojesus alejandroAún no hay calificaciones
- CARBOHIDRATOSDocumento14 páginasCARBOHIDRATOSjesus alejandroAún no hay calificaciones
- Trigo-Producción NacionalDocumento14 páginasTrigo-Producción Nacionaljesus alejandroAún no hay calificaciones
- Actividad #6Documento5 páginasActividad #6jesus alejandroAún no hay calificaciones
- TareaDocumento4 páginasTareajesus alejandroAún no hay calificaciones
- ImpactoDocumento14 páginasImpactojesus alejandroAún no hay calificaciones
- ImpactoDocumento14 páginasImpactojesus alejandroAún no hay calificaciones
- Estructuras IndeterminadasDocumento3 páginasEstructuras Indeterminadasruben4040Aún no hay calificaciones
- Practica 1 FenoDocumento18 páginasPractica 1 Fenojesus alejandroAún no hay calificaciones
- Termo Actividad 5Documento5 páginasTermo Actividad 5jesus alejandroAún no hay calificaciones
- Tecnologia de Los Alimentos IIDocumento4 páginasTecnologia de Los Alimentos IIjesus alejandroAún no hay calificaciones
- Impacto en La SociedadDocumento1 páginaImpacto en La Sociedadjesus alejandroAún no hay calificaciones
- Instrumentos Básicos para Mediciones MecánicasDocumento10 páginasInstrumentos Básicos para Mediciones Mecánicasjesus alejandroAún no hay calificaciones
- Impacto en La SociedadDocumento1 páginaImpacto en La Sociedadjesus alejandroAún no hay calificaciones
- Proyecto Etico de Vida Pdca 16Documento34 páginasProyecto Etico de Vida Pdca 16jesus alejandroAún no hay calificaciones
- Tablas TermodinamicaDocumento110 páginasTablas Termodinamicajesus alejandroAún no hay calificaciones
- Tarea PowerpointDocumento1 páginaTarea Powerpointjesus alejandroAún no hay calificaciones
- Tarea PowerpointDocumento1 páginaTarea Powerpointjesus alejandroAún no hay calificaciones
- Tarea PowerpointDocumento1 páginaTarea Powerpointjesus alejandroAún no hay calificaciones
- Copia de Reg. Gral. de Deberes MilitaresDocumento37 páginasCopia de Reg. Gral. de Deberes MilitaresJosé Luis Zaragoza PérezAún no hay calificaciones
- Leister Triac-St EsDocumento4 páginasLeister Triac-St EsIvonne DelgadoAún no hay calificaciones
- Continua Calor y TemperaturaDocumento13 páginasContinua Calor y Temperaturarosa luzAún no hay calificaciones
- Guia 2 - CFCDocumento33 páginasGuia 2 - CFCOLMER CLAUDIO VILLENA LEONAún no hay calificaciones
- Nivelaciones de NovenoDocumento6 páginasNivelaciones de NovenoLeidy Isabel Alvarez TasconAún no hay calificaciones
- Examen 1Documento5 páginasExamen 1segundo juan montalvo riosAún no hay calificaciones
- 00 Pulsación, Movimiento y CompásDocumento5 páginas00 Pulsación, Movimiento y Compásjuan garcía herreraAún no hay calificaciones
- Manual Topcon ES Series Espanol PDFDocumento77 páginasManual Topcon ES Series Espanol PDFcristofer_cristianAún no hay calificaciones
- Molo - Gramos - MasaDocumento4 páginasMolo - Gramos - MasaalexandraAún no hay calificaciones
- BitacoraDocumento2 páginasBitacoraEdu FigueroaAún no hay calificaciones
- Notas Del Lanzamiento Fedora 12Documento496 páginasNotas Del Lanzamiento Fedora 12abb8404Aún no hay calificaciones
- Cap 1 - 5 Curso de Simulacion Numérica Avanzada de Yacimientos de Petróleo y GasDocumento354 páginasCap 1 - 5 Curso de Simulacion Numérica Avanzada de Yacimientos de Petróleo y GasGeorge Deri100% (2)
- Polarización de MosfetsDocumento23 páginasPolarización de MosfetsEbert Gabriel San Román CastilloAún no hay calificaciones
- OUTPUTDocumento11 páginasOUTPUTChristianAún no hay calificaciones
- Armonía Práctica de La Guitarra II: PoliacordesDocumento11 páginasArmonía Práctica de La Guitarra II: PoliacordesMatias GonzalezAún no hay calificaciones
- Medidas de Tendencia Central para Quinto de PrimariaDocumento5 páginasMedidas de Tendencia Central para Quinto de PrimariahectorAún no hay calificaciones
- Como Vectorizar Una Imagen (Tutorial Propio) - Taringa!Documento12 páginasComo Vectorizar Una Imagen (Tutorial Propio) - Taringa!resmarAún no hay calificaciones
- Manual de Corte y Confeccion - YrisDocumento26 páginasManual de Corte y Confeccion - YrisYris Pilar Peña AriasAún no hay calificaciones
- Criterios de LogroDocumento2 páginasCriterios de LogroAndres AvilaAún no hay calificaciones
- Temario Curso MsaDocumento2 páginasTemario Curso MsaFrankk JohnnAún no hay calificaciones
- Bebidas y CoctelesDocumento40 páginasBebidas y CoctelesVicky Tu Princesita100% (3)
- Taller No. 1 - Principios Q. Org. Gral.Documento6 páginasTaller No. 1 - Principios Q. Org. Gral.Ronal RenteriaAún no hay calificaciones
- Teoria de Colas PDFDocumento18 páginasTeoria de Colas PDFgabrielemeAún no hay calificaciones
- Vod 12Documento18 páginasVod 12Richard Cortez SosaAún no hay calificaciones
- Laboratorios PLC AB PDFDocumento94 páginasLaboratorios PLC AB PDFYoel Anibal Ascencio CharriAún no hay calificaciones
- Laboratorio La FlorDocumento14 páginasLaboratorio La FlorSofia Miku GutierrezAún no hay calificaciones
- ManualDocumento32 páginasManualDiana MazaAún no hay calificaciones
- Funcionamiento de Sensores Magnéticos y Circuitos Pull Up y Pull DownDocumento11 páginasFuncionamiento de Sensores Magnéticos y Circuitos Pull Up y Pull DowncegongpAún no hay calificaciones
- Laboratorios de HidrocarburosDocumento4 páginasLaboratorios de HidrocarburosYessica RangelAún no hay calificaciones
- Sesion Nº2 EdDocumento28 páginasSesion Nº2 EdELMER TIGRE HUAMANAún no hay calificaciones
- Infome de EmpujeDocumento20 páginasInfome de EmpujeCintia RialtamiranoAún no hay calificaciones