También podría gustarte
- Ejercicios para PLCDocumento3 páginasEjercicios para PLCIng Jhoseprocker AvilesAún no hay calificaciones
- Preparar y acondicionar los equipos principales e instalaciones auxiliares de la planta química. QUIE0108De EverandPreparar y acondicionar los equipos principales e instalaciones auxiliares de la planta química. QUIE0108Calificación: 5 de 5 estrellas5/5 (1)
- Guia 5 - Casos de Problemas Automatizacion PLC PDFDocumento3 páginasGuia 5 - Casos de Problemas Automatizacion PLC PDFceluis vargas0% (1)
- Mantenimiento de sistemas de climatización. TMVG0209De EverandMantenimiento de sistemas de climatización. TMVG0209Aún no hay calificaciones
- Ejercicios LadderDocumento3 páginasEjercicios LadderXavier Yael0% (1)
- UF0572 - Instalaciones eficientes de suministro de agua y saneamiento en edificiosDe EverandUF0572 - Instalaciones eficientes de suministro de agua y saneamiento en edificiosCalificación: 4 de 5 estrellas4/5 (4)
- Automatizacion EjerciciosDocumento7 páginasAutomatizacion Ejerciciosapi-32704788250% (2)
- Mantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209De EverandMantenimiento de los dispositivos eléctricos de habitáculo y cofre motor. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
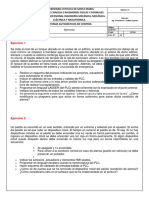
- Examen PrácticoDocumento5 páginasExamen PrácticoRaul Ortega MartínezAún no hay calificaciones
- Puesta en marcha y regulación de instalaciones de climatización y ventilación-extracción. IMAR0208De EverandPuesta en marcha y regulación de instalaciones de climatización y ventilación-extracción. IMAR0208Aún no hay calificaciones
- Guia de Ejercicios de Programacià N de PLCsDocumento5 páginasGuia de Ejercicios de Programacià N de PLCsAnonymous b08DL0pAún no hay calificaciones
- Ejercicios PLCDocumento2 páginasEjercicios PLCSEBASTIAN FELIPE CORTES LOPEZAún no hay calificaciones
- Hernan Vasquez de La Torre Examen FinalDocumento14 páginasHernan Vasquez de La Torre Examen FinalDarwin Yonel Mamani SalcedoAún no hay calificaciones
- Trabajo Practico Unidad 3Documento2 páginasTrabajo Practico Unidad 3matrix1xAún no hay calificaciones
- Examen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDocumento14 páginasExamen Final de Automatización Neumática en La Industria - Mamani Salcedo DarwinDarwin Yonel Mamani SalcedoAún no hay calificaciones
- Actividad LC1Documento2 páginasActividad LC1Andres VillagomezAún no hay calificaciones
- Problemas T7 PDFDocumento23 páginasProblemas T7 PDFcuyonen100% (1)
- Tercer Mes PLCDocumento6 páginasTercer Mes PLCDolores FuertesAún no hay calificaciones
- Ejercicios Control de MotoresDocumento12 páginasEjercicios Control de MotoresEdwin_p98100% (1)
- III FASE - EjerciciosDocumento6 páginasIII FASE - EjerciciosAlejandro Valdivia OrtegaAún no hay calificaciones
- GrafDocumento10 páginasGrafLuis Eduardo RamírezAún no hay calificaciones
- Ejercicios PLCDocumento11 páginasEjercicios PLCEverardo RiosAún no hay calificaciones
- Práctica #8. Aplicaciones Básicas para Autómatas ProgamablesDocumento6 páginasPráctica #8. Aplicaciones Básicas para Autómatas ProgamablesDaniel David Mantilla QuinteroAún no hay calificaciones
- Taller2 Control Secuencial PLC AVANZADO Ceres DoradaDocumento2 páginasTaller2 Control Secuencial PLC AVANZADO Ceres DoradaMARIA CAMILA ARIAS GIRALDOAún no hay calificaciones
- Arranque Del GeneradorDocumento6 páginasArranque Del GeneradorJuanAún no hay calificaciones
- Ejercicios U1 PDFDocumento2 páginasEjercicios U1 PDFjazmiinnAún no hay calificaciones
- Problemas de PLC. (Guía Evaluada)Documento8 páginasProblemas de PLC. (Guía Evaluada)Fabián ToledoAún no hay calificaciones
- EF Ingenieriaindustrial (S1-2020)Documento3 páginasEF Ingenieriaindustrial (S1-2020)Wendy UmbaribaAún no hay calificaciones
- Diagnostico KMDocumento7 páginasDiagnostico KMGeorge UribeAún no hay calificaciones
- Ejercicios GrafcetDocumento4 páginasEjercicios GrafcetRonald Eder Chavez Palomino100% (2)
- Planta de CaudalDocumento6 páginasPlanta de CaudalAnonymous FhO1AjeCBAún no hay calificaciones
- Ejercicios Banda TransportadoraDocumento17 páginasEjercicios Banda TransportadoraDavy Fco Piña VAún no hay calificaciones
- Salmonera: Automatización y Control IndustrialDocumento36 páginasSalmonera: Automatización y Control Industrialjmolina500Aún no hay calificaciones
- Proyectos para Realizar Con PLCDocumento10 páginasProyectos para Realizar Con PLCgrome grmeAún no hay calificaciones
- Informe Practica Calificada 3Documento16 páginasInforme Practica Calificada 3Arturo CMAún no hay calificaciones
- Ejer LogoDocumento5 páginasEjer LogoZona T BogotáAún no hay calificaciones
- Ejercicios Con TimersDocumento3 páginasEjercicios Con TimerserangeldiazAún no hay calificaciones
- Ejercicios DigitalesDocumento3 páginasEjercicios DigitalesJhoan Alexis Garcia PlataAún no hay calificaciones
- TALLERn3nDEnLOGICAnPROGRAMABLE 996395f5a65b1b3Documento3 páginasTALLERn3nDEnLOGICAnPROGRAMABLE 996395f5a65b1b3jean paul gonzalezAún no hay calificaciones
- FinalDocumento5 páginasFinalMaycon CLAún no hay calificaciones
- Manual de Instalacion Tabero Control BombasDocumento8 páginasManual de Instalacion Tabero Control BombasarturoAún no hay calificaciones
- Manual de Funcionamiento EB Llenado Tanques ElevadosDocumento8 páginasManual de Funcionamiento EB Llenado Tanques Elevadoscarlitos64Aún no hay calificaciones
- Taller Recuperacion Pablo, AlejandroDocumento7 páginasTaller Recuperacion Pablo, Alejandropablo andres gil martinezAún no hay calificaciones
- Control Industrial Tb1Documento15 páginasControl Industrial Tb1SebastinelliAún no hay calificaciones
- 0 Manual Service Whirlpool EspañolDocumento23 páginas0 Manual Service Whirlpool EspañolxxboatAún no hay calificaciones
- Guà A de ProyectosDocumento10 páginasGuà A de Proyectosdelmer avilaAún no hay calificaciones
- Problemas de PLCDocumento2 páginasProblemas de PLCCarlosmabAún no hay calificaciones
- MT 233 Control de Procesos Ta3 2018 02Documento6 páginasMT 233 Control de Procesos Ta3 2018 02Alin Eduardo Gabino GarciaAún no hay calificaciones
- Logica ProgramadaDocumento5 páginasLogica Programadasilvia juliana duarteAún no hay calificaciones
- Ejercicios ContactosDocumento1 páginaEjercicios ContactosMiguelAún no hay calificaciones
- Programacion MezcladoraDocumento1 páginaProgramacion MezcladoraJosé Manuel García MartínAún no hay calificaciones
- Práctica Automatismo CDocumento12 páginasPráctica Automatismo CEnrique PuenteAún no hay calificaciones
- Coloquios de Control Industrial de La Escuela Politécnica NacionalDocumento33 páginasColoquios de Control Industrial de La Escuela Politécnica NacionalDarwin AlexanderAún no hay calificaciones
- Autoclave ElectronicaDocumento3 páginasAutoclave ElectronicaGianky ForondaAún no hay calificaciones
- Instructivo de Uso de ChillerDocumento2 páginasInstructivo de Uso de ChillerAndre GalarzaAún no hay calificaciones
- Procesador de Tejido Bio-OpticaDocumento18 páginasProcesador de Tejido Bio-OpticaJuan Carlos DiazAún no hay calificaciones
- Taller General PLC Programas CombinacionalDocumento6 páginasTaller General PLC Programas CombinacionalDANIEL ARROYAVE FRANCOAún no hay calificaciones
- Ejercicos PLCDocumento3 páginasEjercicos PLCMarcelo Moya CajasAún no hay calificaciones
- Solución Segundo Parcial 21-22Documento8 páginasSolución Segundo Parcial 21-22Jorge Salvador HermosillaAún no hay calificaciones
- Traducción de API 653 - Parte Vs 2012Documento48 páginasTraducción de API 653 - Parte Vs 2012Luis CONDORI SOTOAún no hay calificaciones
- 2021-01 Ef Ed Civ4-1Documento2 páginas2021-01 Ef Ed Civ4-1Huanca Calla TaniaAún no hay calificaciones
- BPM de La FDA en EspañolDocumento19 páginasBPM de La FDA en EspañolHari QuintanillaAún no hay calificaciones
- Sub Bases y Bases de PavimentosDocumento13 páginasSub Bases y Bases de Pavimentosmarlit nuñez meraAún no hay calificaciones
- Carros de Combate - Colección de Tanques de GuerraDocumento3 páginasCarros de Combate - Colección de Tanques de GuerraozeozeleteAún no hay calificaciones
- Cotización 202303BER-0005 M210 VSB914 SINOHYDRODocumento9 páginasCotización 202303BER-0005 M210 VSB914 SINOHYDROGaby Mendoza MendozaAún no hay calificaciones
- Productos Quimicos-Control de Emergencias-Diagramas de Flujo de ActuacionDocumento49 páginasProductos Quimicos-Control de Emergencias-Diagramas de Flujo de ActuacionLenny Quintero100% (1)
- Curso Pala 6040 FsDocumento123 páginasCurso Pala 6040 FsCARLOS CHOQUEPUMA YUCRA100% (10)
- HMK 102 B Alpha Retrocargadora HidromekDocumento32 páginasHMK 102 B Alpha Retrocargadora HidromekLuis ToroAún no hay calificaciones
- MANUAL ElevadorDocumento20 páginasMANUAL Elevadormatias.sciutto91Aún no hay calificaciones
- Problemas AUTOMATISMOS LÓGICOSDocumento31 páginasProblemas AUTOMATISMOS LÓGICOSGabriela Ucañán Flores100% (1)
- MarinadoDocumento4 páginasMarinadoK'xun MedinaAún no hay calificaciones
- Teoría y Parámetros de Diseño Sist de AlmacenamientoDocumento24 páginasTeoría y Parámetros de Diseño Sist de AlmacenamientoZuker Ingal IIAún no hay calificaciones
- Manual de Autoclave Odontologico MonaDocumento38 páginasManual de Autoclave Odontologico MonaingenieriahmqAún no hay calificaciones
- Tarea Sensores1 PDFDocumento22 páginasTarea Sensores1 PDFDouglassAún no hay calificaciones
- Memoria de Calculo Sanitarias AngosturaDocumento12 páginasMemoria de Calculo Sanitarias AngosturaEdwin CornejoAún no hay calificaciones
- Pasos y Ductos Verticales y Horizon Tales (1-2)Documento18 páginasPasos y Ductos Verticales y Horizon Tales (1-2)lalolanda182100% (1)
- Modifican El Anexo N 1 Manual de Inspecciones Tecnicas Ve Resolucion Directoral No 003 2019 mtc18 1766023 1Documento6 páginasModifican El Anexo N 1 Manual de Inspecciones Tecnicas Ve Resolucion Directoral No 003 2019 mtc18 1766023 1Andres NunezAún no hay calificaciones
- Resolucion Directoral N°014-2009-MTCDocumento13 páginasResolucion Directoral N°014-2009-MTCalonsogonzalesAún no hay calificaciones
- BlitzkriegDocumento31 páginasBlitzkriegMoriss CamachoAún no hay calificaciones
- BucyrusDocumento42 páginasBucyrusIntichigen100% (1)
- NCH 2427 of 2004 Mod 2005 PDFDocumento47 páginasNCH 2427 of 2004 Mod 2005 PDFKarin NuñezAún no hay calificaciones
- Volute ESDocumento12 páginasVolute ESWilmer FloresAún no hay calificaciones
- Proyecto de Sensor de NivelDocumento4 páginasProyecto de Sensor de NivelXavierMartinezAún no hay calificaciones
- Manual Cortasetos StihlDocumento20 páginasManual Cortasetos StihlLORSIGMAAún no hay calificaciones
- 04 Fuerzas Debidas A Fluidos EstaticosDocumento21 páginas04 Fuerzas Debidas A Fluidos EstaticosAntonio Aversa100% (1)
- Manual de Operacion Modelos DGDocumento44 páginasManual de Operacion Modelos DGjozeolmosAún no hay calificaciones
- PTS Construccion de Tanques 006Documento72 páginasPTS Construccion de Tanques 006Marlin Mora100% (1)
- Analisis Sistemas de Alcantarillado de Bajo CostoDocumento36 páginasAnalisis Sistemas de Alcantarillado de Bajo CostoKatty GuanoluisaAún no hay calificaciones