También podría gustarte
- Gluconato de CalcioDocumento7 páginasGluconato de CalcioGabriel Martínez G100% (2)
- Defectos y Discontinuidades de La Soldadura Ensayo No DestructivosDocumento20 páginasDefectos y Discontinuidades de La Soldadura Ensayo No DestructivosWalter Rueda100% (1)
- Manual Del Ingeniero de MantenimientoDocumento291 páginasManual Del Ingeniero de Mantenimientoagalarzag100% (30)
- Cociente de RayleighDocumento9 páginasCociente de RayleighJunior FlooAún no hay calificaciones
- Cuadro de CargasDocumento2 páginasCuadro de CargasJaime Lucero ReyesAún no hay calificaciones
- Informe Estudio de Suelos Fiscalia PatazDocumento28 páginasInforme Estudio de Suelos Fiscalia PatazArturo Z. Miranda HernandezAún no hay calificaciones
- Apuntes Generales Sobre Redes de Distribución EléctricaDocumento329 páginasApuntes Generales Sobre Redes de Distribución EléctricaSebastián Ribadeneira100% (1)
- Cuadro de Maxima DemandaDocumento4 páginasCuadro de Maxima Demandajoel orihuelaAún no hay calificaciones
- 11 Estudio de Mantenimiento Basado en Confiabilidad (RCM) Aplicado en Transmision de Levante en Palas Electricas Bucyrus 495 1Documento141 páginas11 Estudio de Mantenimiento Basado en Confiabilidad (RCM) Aplicado en Transmision de Levante en Palas Electricas Bucyrus 495 1HernánMaldonadoGámez50% (2)
- Método de Diferncia Central y Método de Newmark-Dinámica de Las EstructurasDocumento8 páginasMétodo de Diferncia Central y Método de Newmark-Dinámica de Las EstructurasAngel Fernando Orellana ChipantizaAún no hay calificaciones
- DinamicaDocumento8 páginasDinamicajavier lokatiAún no hay calificaciones
- Cálculos Pat PaOPDocumento5 páginasCálculos Pat PaOPRemy Castañeda RamosAún no hay calificaciones
- Ut522 Manual de UsuarioDocumento11 páginasUt522 Manual de UsuarioGuillermo Granada MarinAún no hay calificaciones
- Cálculo Eléctrico ExcelDocumento6 páginasCálculo Eléctrico ExcelAlbert Mamani ConchaAún no hay calificaciones
- Espectro Sismo 1970Documento12 páginasEspectro Sismo 1970fernandezhAún no hay calificaciones
- Metodo CentralDocumento8 páginasMetodo CentralmauricioAún no hay calificaciones
- Informe Trabajos Realizados ACOBAMBILLA JUNIODocumento5 páginasInforme Trabajos Realizados ACOBAMBILLA JUNIONeftali Tintaya SurichaquiAún no hay calificaciones
- SDF Duhamel CentroDocumento977 páginasSDF Duhamel CentroBryan PerezAún no hay calificaciones
- INCLUSIONDocumento391 páginasINCLUSIONpaulAún no hay calificaciones
- Tabla Barras Desnudas o PintadasDocumento1 páginaTabla Barras Desnudas o PintadasJosé Domingo Salas VelazcoAún no hay calificaciones
- Bal 11 - Salgado - Sistemas de Trans. y Distribucion0001Documento20 páginasBal 11 - Salgado - Sistemas de Trans. y Distribucion0001marco curo quispeAún no hay calificaciones
- Dimensionamiento A Puesta TierraDocumento11 páginasDimensionamiento A Puesta TierraANGIE ESTEFANY VASQUEZ MIRANDAAún no hay calificaciones
- Informe HidroituangoDocumento8 páginasInforme HidroituangoMonica Julieth Vargas AguilarAún no hay calificaciones
- Energia Renovables No Convencionales en El Perú - Situación Actual y PerspectivasDocumento58 páginasEnergia Renovables No Convencionales en El Perú - Situación Actual y Perspectivasjuanaurich100% (1)
- Sector Tipicos 2014Documento39 páginasSector Tipicos 2014kevin Canahualpa IriarteAún no hay calificaciones
- Estudio de Un Sistema de Generacion de Energia EolicaDocumento11 páginasEstudio de Un Sistema de Generacion de Energia EolicaLuis valenzuala diazAún no hay calificaciones
- Transformadores Tipo Seco MTDocumento4 páginasTransformadores Tipo Seco MThtilanowAún no hay calificaciones
- Diseño Subestación ConstancioDocumento33 páginasDiseño Subestación ConstancioJuan Hernández Gil100% (1)
- Fisica de La TelevisionDocumento119 páginasFisica de La TelevisionAntonioAún no hay calificaciones
- Tesis Electrificacion RuralDocumento44 páginasTesis Electrificacion RuralSandro SilvaAún no hay calificaciones
- Guía de Laboratorio No. 2 - Parte I Sent. Alternativas - 2021Documento22 páginasGuía de Laboratorio No. 2 - Parte I Sent. Alternativas - 2021Israel GóndolaAún no hay calificaciones
- Ho e TRBDocumento4 páginasHo e TRBCristian Gonzales LucasAún no hay calificaciones
- Elaboracion de Tarifas PDFDocumento1 páginaElaboracion de Tarifas PDFJose Luyo SanchezAún no hay calificaciones
- Mercados ElectricosDocumento115 páginasMercados ElectricosEIEEAún no hay calificaciones
- Las Plantas de HelechosDocumento4 páginasLas Plantas de HelechosCarlos ApeñaAún no hay calificaciones
- Pico Central Hidroelectrica CaseraDocumento14 páginasPico Central Hidroelectrica Caseraf0_0sAún no hay calificaciones
- Electrificacion Rural en El Peru y en La Region Huanuco - N. Garcia U.Documento40 páginasElectrificacion Rural en El Peru y en La Region Huanuco - N. Garcia U.Luis Navarro Alvarez100% (1)
- Estudio de Cortocircuito y Coordinación de ProteccionesDocumento6 páginasEstudio de Cortocircuito y Coordinación de ProteccionesGabitte PerzAún no hay calificaciones
- Cartera GeneralDocumento224 páginasCartera GeneralChristian MartinezAún no hay calificaciones
- Microcentrales HidroeléctricasDocumento33 páginasMicrocentrales HidroeléctricasMarlon MauryAún no hay calificaciones
- Faja de Servidumbre Linea 33 KVDocumento2 páginasFaja de Servidumbre Linea 33 KVJose Carlos Tapia MamaniAún no hay calificaciones
- Curso Virtual Lineas de Transmisión Semana 04Documento35 páginasCurso Virtual Lineas de Transmisión Semana 04Keyber Yober castillo GarcíaAún no hay calificaciones
- ENSA PO MD 001 Memoria DescriptivaDocumento18 páginasENSA PO MD 001 Memoria DescriptivaElmer Gonzalo Sullca ZapataAún no hay calificaciones
- Actividad 1 Guía 4 Gestión de Un Programa de AuditoríaDocumento2 páginasActividad 1 Guía 4 Gestión de Un Programa de AuditoríayoharamyAún no hay calificaciones
- ENSA-PO-ET-003 ET Seccionador de LineaDocumento11 páginasENSA-PO-ET-003 ET Seccionador de LineaElmer Gonzalo Sullca ZapataAún no hay calificaciones
- RESUMEN CARGAS PETIT THOUARS 235 - Dra Maria EstherDocumento2 páginasRESUMEN CARGAS PETIT THOUARS 235 - Dra Maria EstherMatthew Soller0% (1)
- Presupuesto Servicio de Cambio de Aisladores en Torres de Lineas ElectricasDocumento8 páginasPresupuesto Servicio de Cambio de Aisladores en Torres de Lineas ElectricasBer Seloque HicisteAún no hay calificaciones
- Practica Calificada 02 GQTDocumento1 páginaPractica Calificada 02 GQTJohann Smith Aranda RamosAún no hay calificaciones
- Diseño Tipico Subestacion RuralDocumento37 páginasDiseño Tipico Subestacion RuralLisandroAún no hay calificaciones
- Marzo 2023 2 Reporte Diario PCH Chuyapi RDocumento32 páginasMarzo 2023 2 Reporte Diario PCH Chuyapi Rempresa inmelAún no hay calificaciones
- HIDROITUANGODocumento20 páginasHIDROITUANGOPaul QuirogaAún no hay calificaciones
- Calculos Terma Solar ZapallangaDocumento13 páginasCalculos Terma Solar ZapallangaKevin Santos CasoAún no hay calificaciones
- Distribución Weibull y GumbelDocumento2 páginasDistribución Weibull y GumbelLuis Alex Meza OsorioAún no hay calificaciones
- Calculo Caida de TensionDocumento3 páginasCalculo Caida de TensionRomel Fidel Cahuana Vizcardo100% (1)
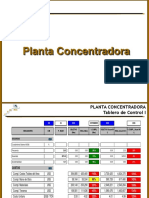
- Planta Concentradora - London 26 Set 06Documento11 páginasPlanta Concentradora - London 26 Set 06Beker Chaca BonillaAún no hay calificaciones
- 4 Metrado RPDocumento30 páginas4 Metrado RPCubas Barboza CubasAún no hay calificaciones
- ENSA-PO-MC-001 Coord. Aislamiento Rev ADocumento34 páginasENSA-PO-MC-001 Coord. Aislamiento Rev AElmer Gonzalo Sullca ZapataAún no hay calificaciones
- Calculo de Subestación Electrica y PlantaDocumento5 páginasCalculo de Subestación Electrica y PlantaLize RamosAún no hay calificaciones
- Sistemas de Distribución EléctricaDocumento8 páginasSistemas de Distribución EléctricaAdolfo LopezAún no hay calificaciones
- Memoria 01 MTDocumento127 páginasMemoria 01 MT19848096Aún no hay calificaciones
- Ejercicios de Despacho EconomicoDocumento1 páginaEjercicios de Despacho Economicojose iberbudenAún no hay calificaciones
- Calculo Conductor EléctricoDocumento9 páginasCalculo Conductor EléctricoAdriam Machado CastilloAún no hay calificaciones
- S02.s1 - Distribución de Frecuencias Variable CuantitativaDocumento30 páginasS02.s1 - Distribución de Frecuencias Variable CuantitativamariAún no hay calificaciones
- 6 Aplicacion Pararrayos v1Documento15 páginas6 Aplicacion Pararrayos v1elbebe1419Aún no hay calificaciones
- Libro de Vibra - IngMarciano PDFDocumento83 páginasLibro de Vibra - IngMarciano PDFDavid AcostaAún no hay calificaciones
- Hoja de Ruta Del Hidrogeno ColombiaDocumento54 páginasHoja de Ruta Del Hidrogeno Colombiacesar barandaAún no hay calificaciones
- CAPITULO 2 - Problemas Propuestos y Preguntas para PensarDocumento6 páginasCAPITULO 2 - Problemas Propuestos y Preguntas para PensarTania K Martin HernandezAún no hay calificaciones
- Portafolio Adiestramiento TWPL PDFDocumento34 páginasPortafolio Adiestramiento TWPL PDFDaniel Navarrete Espinoza0% (1)
- Descripcion Areas MinaDocumento8 páginasDescripcion Areas MinaDaniel Navarrete Espinoza0% (1)
- Catalogo OrfitDocumento60 páginasCatalogo OrfitLiiLy TorresAún no hay calificaciones
- LUKAS Catalogo 2013-08 Es PDFDocumento69 páginasLUKAS Catalogo 2013-08 Es PDFwaltergvAún no hay calificaciones
- Problemas Por Secciones 586 590Documento5 páginasProblemas Por Secciones 586 590AnckSuWonkaAún no hay calificaciones
- Estatica de FluidosDocumento21 páginasEstatica de FluidosDiegoAlonsoGonzalesRomeroAún no hay calificaciones
- PDFDocumento105 páginasPDFJohn FermanAún no hay calificaciones
- Vias de Comunicacion....Documento11 páginasVias de Comunicacion....djrobert_22Aún no hay calificaciones
- Taller de Sinonimia 1 - 2Documento4 páginasTaller de Sinonimia 1 - 2Kevin ArcosAún no hay calificaciones
- GPS y La Teoría de La RelatividadDocumento6 páginasGPS y La Teoría de La RelatividadLizbeth K. Espada De la CruzAún no hay calificaciones
- UFPS - Colisiones EN DOS DimensionesDocumento5 páginasUFPS - Colisiones EN DOS DimensionesKIKER MUSIC DJAún no hay calificaciones
- ExperimentosDocumento5 páginasExperimentosRvpz DorisAún no hay calificaciones
- Practico Exponencial ComplementoDocumento8 páginasPractico Exponencial ComplementoVirginia AvilaAún no hay calificaciones
- Informe Lab. Practica-2Documento14 páginasInforme Lab. Practica-2Esvin MansillaAún no hay calificaciones
- Clasificacion de Suelos-TocasDocumento20 páginasClasificacion de Suelos-TocasJunior Vergara MattosAún no hay calificaciones
- Aplicaciones Lineales y Matrices (Universidad de Valencia)Documento17 páginasAplicaciones Lineales y Matrices (Universidad de Valencia)Dani GarciaAún no hay calificaciones
- Union SoldadaDocumento10 páginasUnion SoldadaAnonymous O0c2PG3ORwAún no hay calificaciones
- Estalagmómetro - Tensión SuperficialDocumento2 páginasEstalagmómetro - Tensión Superficialurielmiranda10% (1)
- Texto7 PDFDocumento38 páginasTexto7 PDFSofíaFiorellaToneChávezAún no hay calificaciones
- WebFT01 ViscosidadDocumento19 páginasWebFT01 ViscosidadJosueGuayuscaSoriaGalvarroAún no hay calificaciones
- 1º ESO G&H Tema 1-SmSaviaDocumento8 páginas1º ESO G&H Tema 1-SmSaviaMinervaAún no hay calificaciones
- Práctica 7 Lab ControlDocumento27 páginasPráctica 7 Lab ControlRoberto HernandezAún no hay calificaciones
- Diagramas de MinkowskiDocumento20 páginasDiagramas de MinkowskiManuel Vergaray RodriguezAún no hay calificaciones
- Choques FrontalesDocumento8 páginasChoques FrontalesCarlos StAún no hay calificaciones
- Guia 4 - Cubeta de Ondas PDFDocumento8 páginasGuia 4 - Cubeta de Ondas PDFfranksineacademiaAún no hay calificaciones
- Cuestionario CadenasDocumento3 páginasCuestionario CadenasCristhian YuquiAún no hay calificaciones
- DiseDocumento11 páginasDiseJosue Espinoza JesusAún no hay calificaciones