También podría gustarte
- Estandar de Trabajos en Caliente - 10082021Documento20 páginasEstandar de Trabajos en Caliente - 10082021camiloAún no hay calificaciones
- Teoría de Colas - IOP2Documento71 páginasTeoría de Colas - IOP2MarcelloJCalvo0% (1)
- HS Aceite Lubricante Motor 2013 PDFDocumento6 páginasHS Aceite Lubricante Motor 2013 PDFeduardoAún no hay calificaciones
- Calculo de Soporte Tipo CaballeteDocumento14 páginasCalculo de Soporte Tipo Caballetekurtaxl_h100% (3)
- Definición de La Transformada de Laplace DerivaciónDocumento11 páginasDefinición de La Transformada de Laplace DerivaciónAmeluz AmeluzAún no hay calificaciones
- Folleto Final Matematica Superior PDFDocumento471 páginasFolleto Final Matematica Superior PDFErick FreireAún no hay calificaciones
- Algebra 2 Tema 5Documento10 páginasAlgebra 2 Tema 5armandoAún no hay calificaciones
- Tema 6 Algebra 2Documento15 páginasTema 6 Algebra 2Fernando MedranoAún no hay calificaciones
- MCVV2 U3 Ea JomhDocumento4 páginasMCVV2 U3 Ea JomhJoelAlbertoMontalvoHernandezAún no hay calificaciones
- Algebra Vectorial Analisis VectorialDocumento11 páginasAlgebra Vectorial Analisis Vectorialrodrigocorani20Aún no hay calificaciones
- CIPAS 8 Axiomas y Propiedades de Los EV, Dependecia e Independencia LinealDocumento11 páginasCIPAS 8 Axiomas y Propiedades de Los EV, Dependecia e Independencia LinealVelez YohaAún no hay calificaciones
- Cuarderno Virtual Matemtica JRNDocumento16 páginasCuarderno Virtual Matemtica JRNPaolo De Los Santos NonatoAún no hay calificaciones
- Sistema de Numeros ComplejosDocumento9 páginasSistema de Numeros Complejosavner humberto villayzan vargasAún no hay calificaciones
- Tarea4 367 Sandra GutierrezDocumento23 páginasTarea4 367 Sandra GutierrezViviana SantosAún no hay calificaciones
- Sistema de Numeros ComplejosDocumento10 páginasSistema de Numeros ComplejosChristian Quispe ZapataAún no hay calificaciones
- Falso: Primera Práctica Calificada de Cálculo Diferencial - Bma-01Documento3 páginasFalso: Primera Práctica Calificada de Cálculo Diferencial - Bma-01andreelunico09Aún no hay calificaciones
- Regla de La Cadena. Fun. de Varias VariablesDocumento7 páginasRegla de La Cadena. Fun. de Varias VariablesIoan VlasqzAún no hay calificaciones
- SOLUCIONARIO Ex RecuperatorioDocumento3 páginasSOLUCIONARIO Ex Recuperatorioneymar vicente0% (1)
- Tercer Parcial Lineal 2021Documento89 páginasTercer Parcial Lineal 2021Espinoza LeninAún no hay calificaciones
- Alejandro Nuñez - Algebra Lineal - S12Documento8 páginasAlejandro Nuñez - Algebra Lineal - S12jack corcueraAún no hay calificaciones
- Resulucion de Capitulo 2. 2Documento24 páginasResulucion de Capitulo 2. 2Jyohon QuispeAún no hay calificaciones
- Solución:: Demostrar La Ecuación de Navier Stokes: +Documento4 páginasSolución:: Demostrar La Ecuación de Navier Stokes: +Eliseo FloresAún no hay calificaciones
- Vectores en IR3Documento13 páginasVectores en IR3Violencia LaboralAún no hay calificaciones
- Tarea4 88 Oliverio Estrada.Documento17 páginasTarea4 88 Oliverio Estrada.Oliverio EstradaAún no hay calificaciones
- Matematica Superior Aplicada - TP 1Documento14 páginasMatematica Superior Aplicada - TP 1Soledad GomezAún no hay calificaciones
- Tarea 3 - G - 208046 - 341Documento27 páginasTarea 3 - G - 208046 - 341Lorrein AguirreAún no hay calificaciones
- Operaciones DiferencialesDocumento22 páginasOperaciones DiferencialesJorge Andre Mallque SilvaAún no hay calificaciones
- Espacios Vectoriales - DosierDocumento12 páginasEspacios Vectoriales - DosierNando CallizayaAún no hay calificaciones
- ProblemarioDocumento77 páginasProblemarioCESAR HERNANDEZAún no hay calificaciones
- Ejercicio 3.2 BishopDocumento9 páginasEjercicio 3.2 BishopDaysi Rashell RegaladoAún no hay calificaciones
- Esfuerzos Combinados y Medición de Esfuerzos Pórtico Soportando Una Carga VerticalDocumento11 páginasEsfuerzos Combinados y Medición de Esfuerzos Pórtico Soportando Una Carga VerticalErick Iñaguazo PindoAún no hay calificaciones
- Tarea 4 - 208046 - 314 - Kevin - JimenezDocumento8 páginasTarea 4 - 208046 - 314 - Kevin - Jimenezteresa sanabriaAún no hay calificaciones
- Trabajo Práctico Virtual #3Documento58 páginasTrabajo Práctico Virtual #3JULIO NOE GOMEZ ARAUJOAún no hay calificaciones
- Ed Exactas y Reducibles A ExactasDocumento14 páginasEd Exactas y Reducibles A ExactasKEVIN JAIR CORREA PALOMINOAún no hay calificaciones
- Tarea 3 - CalculoDocumento29 páginasTarea 3 - CalculojhonAún no hay calificaciones
- Ejercicios Prouestos Desde La Semana Uno Hasta La 4Documento12 páginasEjercicios Prouestos Desde La Semana Uno Hasta La 4Diego Alexis Ríos MelgarejoAún no hay calificaciones
- Ecuación Diferencial ExactaDocumento4 páginasEcuación Diferencial ExactaGiancarlo ParedesAún no hay calificaciones
- Solucionario Examen Segundo ParcialDocumento4 páginasSolucionario Examen Segundo ParcialJose HerbertAún no hay calificaciones
- Integrales Múltiples PDFDocumento6 páginasIntegrales Múltiples PDFProyecto de GradoAún no hay calificaciones
- Balotario Del Segundo Examen Parcial de Variable ComplejaDocumento13 páginasBalotario Del Segundo Examen Parcial de Variable ComplejaSANDRO XAVIER CCAMA SARAAún no hay calificaciones
- Tarea2 208046 701 Daniel GamezDocumento12 páginasTarea2 208046 701 Daniel GamezDanielAún no hay calificaciones
- EstaticaDocumento3 páginasEstaticaDaniel Cadena MedrandaAún no hay calificaciones
- Demostración Ecuación de Navier-StokesDocumento4 páginasDemostración Ecuación de Navier-StokesJosé VallejoAún no hay calificaciones
- Practica 4 - 4,10,14,18,22 - Gruo 4Documento6 páginasPractica 4 - 4,10,14,18,22 - Gruo 4LMVVAún no hay calificaciones
- Alg - Lin.examen Parcial Resuelto 2019-BDocumento2 páginasAlg - Lin.examen Parcial Resuelto 2019-BPamela Sue-hellen Godoy GarciaAún no hay calificaciones
- Alg - Lin.examen Parcial Resuelto 2019-bDocumento2 páginasAlg - Lin.examen Parcial Resuelto 2019-bSonja HarrisonAún no hay calificaciones
- Trabajo Digital de Estadistica - TapiaDocumento44 páginasTrabajo Digital de Estadistica - TapiaLucas AyalaAún no hay calificaciones
- E.inexactas2022 02Documento19 páginasE.inexactas2022 02RUBEN MARCELO VERGARAY MENDOZAAún no hay calificaciones
- Foro 2 Diferencia Entre Los Operadores Diferenciales: Universidad Tecnológica de MéxicoDocumento3 páginasForo 2 Diferencia Entre Los Operadores Diferenciales: Universidad Tecnológica de MéxicoErik CevillaAún no hay calificaciones
- Ejercicio Del 1 Al 3 de E.V.2022Documento8 páginasEjercicio Del 1 Al 3 de E.V.2022Ivan BrazanovichAún no hay calificaciones
- Semana 14 - Infografía Estática - Construcción de Modelos de Regresión Lineal SimpleDocumento6 páginasSemana 14 - Infografía Estática - Construcción de Modelos de Regresión Lineal SimpleKEVIN SANCHEZ LLASACAAún no hay calificaciones
- Práctica 4Documento1 páginaPráctica 4Jhonatan Inoñan valderaAún no hay calificaciones
- Practica Nº2 EditadoDocumento5 páginasPractica Nº2 EditadoAlan Alejandro Achocalla MamaniAún no hay calificaciones
- Práctica Dirigida 5-AGADocumento2 páginasPráctica Dirigida 5-AGANicole 16Aún no hay calificaciones
- Demostrar Que El Sistema de Los Números Complejos Es Un CampoDocumento41 páginasDemostrar Que El Sistema de Los Números Complejos Es Un CampoMarlon CastilloAún no hay calificaciones
- Parcial II (Cesar Brizuela)Documento14 páginasParcial II (Cesar Brizuela)Cesar BrizuelaAún no hay calificaciones
- 5 PC Mate 3Documento8 páginas5 PC Mate 3Dayane NicoleAún no hay calificaciones
- Álgebra+62 - Práctica+4+-+álgebra+vectorial+-+respuestas+de+la+guíaDocumento16 páginasÁlgebra+62 - Práctica+4+-+álgebra+vectorial+-+respuestas+de+la+guíaDario CavalieriAún no hay calificaciones
- Robot Evasor de ObstaculosDocumento8 páginasRobot Evasor de ObstaculosMelanie Daniela Castillo AguilarAún no hay calificaciones
- Actividad 6 Integrales de LíneaDocumento27 páginasActividad 6 Integrales de LíneaMartha NovoaAún no hay calificaciones
- Calculo Iii - Primera Tarea Academica - CICLO 2014-I: 1) Primer Paso: Intersección Con Los Ejes CoordenadasDocumento22 páginasCalculo Iii - Primera Tarea Academica - CICLO 2014-I: 1) Primer Paso: Intersección Con Los Ejes CoordenadasNef Bueno AAún no hay calificaciones
- Practico Derivadas ParcialesDocumento1 páginaPractico Derivadas ParcialesCarlos Andres Villarroel GuerreroAún no hay calificaciones
- Cybort Umiyauri Trabajo Analisis Matematico 2 XDDocumento12 páginasCybort Umiyauri Trabajo Analisis Matematico 2 XDBradson EloyAún no hay calificaciones
- Ultimo 1Documento7 páginasUltimo 1armandoAún no hay calificaciones
- Practica de Trabajo Energia-1Documento1 páginaPractica de Trabajo Energia-1armandoAún no hay calificaciones
- Practica de DinamicaDocumento2 páginasPractica de DinamicaCRISTOPHER AJATA BARCOAún no hay calificaciones
- Practica Estatica de Fluidos 2 - 2021Documento6 páginasPractica Estatica de Fluidos 2 - 2021armandoAún no hay calificaciones
- Practica de Trabajo Energía Potencia y Choques 1-2021Documento8 páginasPractica de Trabajo Energía Potencia y Choques 1-2021armandoAún no hay calificaciones
- CONICET Digital Nro. DDocumento20 páginasCONICET Digital Nro. DarmandoAún no hay calificaciones
- Lista Examen ELT2570 ABDocumento3 páginasLista Examen ELT2570 ABarmandoAún no hay calificaciones
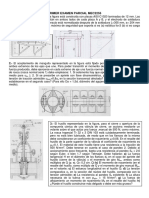
- Primer Examen Parcial Mec2255bDocumento1 páginaPrimer Examen Parcial Mec2255barmandoAún no hay calificaciones
- Practica de Trabajo EnergiaDocumento1 páginaPractica de Trabajo EnergiaarmandoAún no hay calificaciones
- Expositores CIMEMADocumento1 páginaExpositores CIMEMAarmandoAún no hay calificaciones
- Practica Nº4 Fis 1100-TDocumento3 páginasPractica Nº4 Fis 1100-TarmandoAún no hay calificaciones
- Copia de EXAMEN FINAL MEC 2245 - A - (Respuestas) - Respuestas de Formulario 1Documento2 páginasCopia de EXAMEN FINAL MEC 2245 - A - (Respuestas) - Respuestas de Formulario 1armandoAún no hay calificaciones
- Practica de Estática 1 - 2021Documento5 páginasPractica de Estática 1 - 2021armandoAún no hay calificaciones
- Practica Movimiento Oscilatorio II-2021Documento6 páginasPractica Movimiento Oscilatorio II-2021armandoAún no hay calificaciones
- Ficha TecnicaDocumento1 páginaFicha TecnicaarmandoAún no hay calificaciones
- Final 2255Documento1 páginaFinal 2255armandoAún no hay calificaciones
- Conv. AUX QMC EX 1.2022Documento2 páginasConv. AUX QMC EX 1.2022armandoAún no hay calificaciones
- Copia de TERCER PARCIAL MEC 2245 - A - (Respuestas) - Respuestas de Formulario 1Documento2 páginasCopia de TERCER PARCIAL MEC 2245 - A - (Respuestas) - Respuestas de Formulario 1armandoAún no hay calificaciones
- Copia de LISTA MEC 2245 B 1-21 PR2Documento2 páginasCopia de LISTA MEC 2245 B 1-21 PR2armandoAún no hay calificaciones
- Convocatoria Auxiliares 1-2020 BDocumento3 páginasConvocatoria Auxiliares 1-2020 BarmandoAún no hay calificaciones
- Fechas de Asistencias y Exposiciones A LaboratoriosDocumento1 páginaFechas de Asistencias y Exposiciones A LaboratoriosKevin LizarazuAún no hay calificaciones
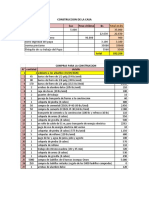
- CONSTRUCCIONDocumento3 páginasCONSTRUCCIONarmandoAún no hay calificaciones
- CONVOCATORIA 2022 Auxiliares SEMESTRE - 1-2022Documento2 páginasCONVOCATORIA 2022 Auxiliares SEMESTRE - 1-2022armandoAún no hay calificaciones
- Examen Tercer (Electrodinamica)Documento2 páginasExamen Tercer (Electrodinamica)armandoAún no hay calificaciones
- EXAMEN FINAL22021fis1100aDocumento1 páginaEXAMEN FINAL22021fis1100aarmandoAún no hay calificaciones
- Examen Segundo Potencial y CapacitoresDocumento2 páginasExamen Segundo Potencial y CapacitoresarmandoAún no hay calificaciones
- Copia de Lista Mec 2245 B 1-21Documento2 páginasCopia de Lista Mec 2245 B 1-21armandoAún no hay calificaciones
- Cronograma de Actividades Grupos Dia ViernesDocumento4 páginasCronograma de Actividades Grupos Dia ViernesKevin LizarazuAún no hay calificaciones
- EXAMEN FIS 1102 SEGUNDO PARCIAL CI 4, 5 y 6Documento1 páginaEXAMEN FIS 1102 SEGUNDO PARCIAL CI 4, 5 y 6Nsisnsin NwiwnsbdbAún no hay calificaciones
- Examen Final Fis1200I20202iiDocumento1 páginaExamen Final Fis1200I20202iiarmandoAún no hay calificaciones
- Pca de Física 2do Bgu ADocumento15 páginasPca de Física 2do Bgu AInfornata Sueds Amd TurionAún no hay calificaciones
- Sensor Virtual Fundamentos PDFDocumento7 páginasSensor Virtual Fundamentos PDFSebas de la TorreAún no hay calificaciones
- Anexo - FICHA 3TN TXKDocumento2 páginasAnexo - FICHA 3TN TXKAntonio Quispe HuamanAún no hay calificaciones
- Cuaderno Informe 01Documento5 páginasCuaderno Informe 01Marco Arteaga villanuevaAún no hay calificaciones
- Historia y Teoría Abstracta (Mosterín)Documento9 páginasHistoria y Teoría Abstracta (Mosterín)AndreaAún no hay calificaciones
- 01 Estequiometria BQU 01Documento15 páginas01 Estequiometria BQU 01Alejandro Isac Mugruza GrandezAún no hay calificaciones
- 2007 5 Citroen c4 Picasso 63959Documento256 páginas2007 5 Citroen c4 Picasso 63959luisAún no hay calificaciones
- Memoria Descriptiva Pileta Ornamental - La Joya ArequipaDocumento6 páginasMemoria Descriptiva Pileta Ornamental - La Joya ArequipaCesar TAún no hay calificaciones
- BobinadoDocumento21 páginasBobinadoNaile Mar Hanco100% (1)
- Energia Potencial y CineticaDocumento4 páginasEnergia Potencial y CineticaMarcela Aguirre Vargas100% (1)
- ADMINISTRACIÓN DE OPERACIONES II La 7m y LAS 7qDocumento13 páginasADMINISTRACIÓN DE OPERACIONES II La 7m y LAS 7qfriduchisAún no hay calificaciones
- Autoevaluación 5Documento3 páginasAutoevaluación 5leidy ortizAún no hay calificaciones
- Taller 1 CD 2022-1Documento4 páginasTaller 1 CD 2022-1Gabriel Geovanny Saldarriaga TamayoAún no hay calificaciones
- CARATULADocumento12 páginasCARATULAMarcelo SanchezAún no hay calificaciones
- ALGEBRA 9asDocumento7 páginasALGEBRA 9asLuigi Ruiz SalvadorAún no hay calificaciones
- s13s1 Tarea Calculos EstequiometricosDocumento5 páginass13s1 Tarea Calculos Estequiometricossusey madelit apaza mamaniAún no hay calificaciones
- Cuaderno de Informe MantenimientoDocumento11 páginasCuaderno de Informe MantenimientoBeto RffoBalTAún no hay calificaciones
- Capitulo Fisica NuclearDocumento11 páginasCapitulo Fisica NuclearJOSE GABRIEL HUACACHI BAZANAún no hay calificaciones
- 1 Propiedades de La Roca Porosidad MaterialDocumento41 páginas1 Propiedades de La Roca Porosidad MaterialManuel Azancot100% (1)
- Problemas de Aplicacion Sistemas 2X2Documento5 páginasProblemas de Aplicacion Sistemas 2X2J Cämïlö CämächöAún no hay calificaciones
- Tarea 2Documento2 páginasTarea 2AdriAún no hay calificaciones
- Protocolo de Laboratorio. 02Documento8 páginasProtocolo de Laboratorio. 02Derek IsraelAún no hay calificaciones
- InformeDocumento36 páginasInformeJORGE SANDOVALAún no hay calificaciones
- Tesis Servicio de Atencion Al Cliente en HotelesDocumento126 páginasTesis Servicio de Atencion Al Cliente en HotelesDaniel Ken KrislerAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 6 - Primer Bloque-Ciencias Basicas - Virtual - Cálculo 2 - (GrupoDocumento7 páginasActividad de Puntos Evaluables - Escenario 6 - Primer Bloque-Ciencias Basicas - Virtual - Cálculo 2 - (GrupoYHEISONAún no hay calificaciones