También podría gustarte
- Trabajo Procesos ProductivosDocumento11 páginasTrabajo Procesos ProductivosGerald A. Camus100% (2)
- Paso 4 ProcesamientoDocumento6 páginasPaso 4 ProcesamientoOmar Gomez VasquezAún no hay calificaciones
- Informe Ventana de KaiserDocumento6 páginasInforme Ventana de KaiserFidel Guerrero VásquezAún no hay calificaciones
- TALLER CATECOLAMINAs Fusm 2020-1Documento6 páginasTALLER CATECOLAMINAs Fusm 2020-1Karina Lozano SinisterraAún no hay calificaciones
- Grupo27 Paso4Documento22 páginasGrupo27 Paso4Esteban ZapataAún no hay calificaciones
- Filtros FIRDocumento10 páginasFiltros FIRMary Alarcon PalominoAún no hay calificaciones
- Prelab9 Filtros Activos Montiel Mosquera Salazar Villacis NRC5493Documento36 páginasPrelab9 Filtros Activos Montiel Mosquera Salazar Villacis NRC5493PAUL ANDRES MOSQUERA RONDAAún no hay calificaciones
- Informe Laboratorio 8Documento27 páginasInforme Laboratorio 8Sebastian CespedesAún no hay calificaciones
- 5-Filtros FIRDocumento30 páginas5-Filtros FIRNosh DominguezAún no hay calificaciones
- Tarea2-Luis Andres Ramos - Grupo 34Documento25 páginasTarea2-Luis Andres Ramos - Grupo 34luis andres ramosAún no hay calificaciones
- Paso4 AmingonzalezDocumento15 páginasPaso4 AmingonzalezDeybi Jimenez RomeroAún no hay calificaciones
- Paso - 4 - Nestor Giovanni Saldarriaga 299004 - 1Documento6 páginasPaso - 4 - Nestor Giovanni Saldarriaga 299004 - 1Harold RiveraAún no hay calificaciones
- Práctica 13 - Filtros RLCDocumento8 páginasPráctica 13 - Filtros RLCJesica RamirezAún no hay calificaciones
- Diaz Iñiguez Miguel Practica6Documento31 páginasDiaz Iñiguez Miguel Practica6MIGUEL ANGEL DIAZ INIGUEZAún no hay calificaciones
- Tarea4 JohanPerezDocumento10 páginasTarea4 JohanPerezJohan PerezAún no hay calificaciones
- Teoría de Los Filtros: Filtros ¿Qué Es Un Filtro?Documento3 páginasTeoría de Los Filtros: Filtros ¿Qué Es Un Filtro?Jefferson SantodomingoAún no hay calificaciones
- Diseño de FiltrosDocumento15 páginasDiseño de FiltrosDiEgo DkoAún no hay calificaciones
- Paso 4Documento8 páginasPaso 4john jairo valencia rojasAún no hay calificaciones
- 5 Filter Lecture PDFDocumento3 páginas5 Filter Lecture PDFLuis Alberto Escarcena LipaAún no hay calificaciones
- Filtro Ventana KaiserDocumento7 páginasFiltro Ventana KaiserArias DalisAún no hay calificaciones
- Lab3p1 PDFDocumento4 páginasLab3p1 PDFJorge Luis RodriguezAún no hay calificaciones
- Filtros Matlab SimulinkDocumento13 páginasFiltros Matlab SimulinkAlejandro IribeAún no hay calificaciones
- Ejercicios - Diseño de FiltrosDocumento3 páginasEjercicios - Diseño de FiltrosCarlos MarínAún no hay calificaciones
- Filtro Ventana KaiserDocumento7 páginasFiltro Ventana KaiserPaolaAún no hay calificaciones
- Práctica Filtros PDFDocumento4 páginasPráctica Filtros PDFjadly duvan ortiz jerezAún no hay calificaciones
- Prot3 Eq FranciscoBDocumento18 páginasProt3 Eq FranciscoBFrancisco BaezAún no hay calificaciones
- Preguntas Emel Viloria Fase 4Documento10 páginasPreguntas Emel Viloria Fase 4venganza vAún no hay calificaciones
- Control Digital: InvestigaciónDocumento6 páginasControl Digital: InvestigaciónFer FloresAún no hay calificaciones
- Paso 4 Edison ChavezDocumento8 páginasPaso 4 Edison Chavezgiovanni saldarriagaAún no hay calificaciones
- Paso 4 - Ejecutar Actividades Procesamiento Digital de SeñalesDocumento7 páginasPaso 4 - Ejecutar Actividades Procesamiento Digital de SeñalespicotoAún no hay calificaciones
- Grupo3 Paso4Documento3 páginasGrupo3 Paso4yuli yimena rueda tellezAún no hay calificaciones
- Presentacion FIR (Upea)Documento72 páginasPresentacion FIR (Upea)Yorcy A. DiazAún no hay calificaciones
- Filtros Media en Movimiento MADocumento6 páginasFiltros Media en Movimiento MAkevin ortizAún no hay calificaciones
- Aporte Carlos Medina Paso 4Documento19 páginasAporte Carlos Medina Paso 4Carlos Guillermo Medina100% (2)
- AporteDocumento7 páginasAporteJUAN SEBASTIAN RUIZ SUAREZAún no hay calificaciones
- Filtro Pasabanda PasivoDocumento7 páginasFiltro Pasabanda PasivoSofía MorenoAún no hay calificaciones
- JohanPerez - Tarea 3Documento2 páginasJohanPerez - Tarea 3Johan PerezAún no hay calificaciones
- Practica4 - Amplificadores OperacionalesDocumento15 páginasPractica4 - Amplificadores OperacionalesSimone bbbbeAún no hay calificaciones
- Filtros IIRDocumento14 páginasFiltros IIRPatricio Fernando Vallejos GuerreroAún no hay calificaciones
- ExamenP1 RESPUESTASDocumento13 páginasExamenP1 RESPUESTASJose MartinezAún no hay calificaciones
- Contenido - Teorico Filtro - IIR - Butterworth - Jaime - VelasquezDocumento3 páginasContenido - Teorico Filtro - IIR - Butterworth - Jaime - VelasquezJvelasve VeAún no hay calificaciones
- Paso 4Documento5 páginasPaso 4orlando ramirezAún no hay calificaciones
- Lab07 Filtros Pasivos 2017-20Documento12 páginasLab07 Filtros Pasivos 2017-20lenin rodriguezAún no hay calificaciones
- Informe Previo 1 Telecomunicaciones IDocumento5 páginasInforme Previo 1 Telecomunicaciones ILiam Eduardo Romero De La CruzAún no hay calificaciones
- RicardoEnriqueOrtegaAtayde Act3 PDFDocumento6 páginasRicardoEnriqueOrtegaAtayde Act3 PDFRicardoAún no hay calificaciones
- Paso 4 - Wilmer - SosaDocumento17 páginasPaso 4 - Wilmer - SosaWilmer SosaAún no hay calificaciones
- Lab4 Rta en Frecuencia RLC-2020 - I-G1 - 4Documento8 páginasLab4 Rta en Frecuencia RLC-2020 - I-G1 - 4Alex BogmaAún no hay calificaciones
- Informe 2 Avance Comunicacion DigitalDocumento15 páginasInforme 2 Avance Comunicacion DigitalDavid LiviasAún no hay calificaciones
- 4.1 Filtros DigitalesDocumento15 páginas4.1 Filtros DigitalesmatamataeoAún no hay calificaciones
- Filtros Digitales FirDocumento81 páginasFiltros Digitales Firdianafranco206403Aún no hay calificaciones
- Laboratorio 5 Circuitos Electronicos 2 90G Mayorga Hilario IvanDocumento30 páginasLaboratorio 5 Circuitos Electronicos 2 90G Mayorga Hilario IvanIván Fernando Mayorga HilarioAún no hay calificaciones
- Paso 5 Filtors IIRDocumento6 páginasPaso 5 Filtors IIRJuan Carlos VillanuevaAún no hay calificaciones
- Filtros DigitalesDocumento7 páginasFiltros DigitalesCarlos CastroAún no hay calificaciones
- Informe Practica 2 - Parte 2Documento19 páginasInforme Practica 2 - Parte 2Edward Nicolas Duarte ValenciaAún no hay calificaciones
- Fase 4 Edgar TrujilloDocumento13 páginasFase 4 Edgar TrujilloJorge Eunveiman Galindo ParraAún no hay calificaciones
- Practica 01 Análisis y Caracterización de Un Filtro Pasa-BajasDocumento8 páginasPractica 01 Análisis y Caracterización de Un Filtro Pasa-BajasJuan DiegoAún no hay calificaciones
- Practica #3Documento14 páginasPractica #3Jordan Moreira ValdezAún no hay calificaciones
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Banco de filtros: Información sobre las técnicas del banco de filtros de Computer VisionDe EverandBanco de filtros: Información sobre las técnicas del banco de filtros de Computer VisionAún no hay calificaciones
- Transformación de Hadamard: Revelando el poder de la transformación de Hadamard en visión por computadoraDe EverandTransformación de Hadamard: Revelando el poder de la transformación de Hadamard en visión por computadoraAún no hay calificaciones
- Transformación de radón: Revelando patrones ocultos en datos visualesDe EverandTransformación de radón: Revelando patrones ocultos en datos visualesAún no hay calificaciones
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaDe EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaAún no hay calificaciones
- Epistola de Rambam PDFDocumento2 páginasEpistola de Rambam PDFDeborah Arango100% (3)
- Restauracion Metal 338 859 1 PBDocumento27 páginasRestauracion Metal 338 859 1 PBstefcha49Aún no hay calificaciones
- Biografia de JoseTomas BovesDocumento6 páginasBiografia de JoseTomas BovesZuleidy Ayary Araque NavaAún no hay calificaciones
- Diagrama de Gantt Del Proyecto PDFDocumento1 páginaDiagrama de Gantt Del Proyecto PDFgersonAún no hay calificaciones
- Generador Portátil 2.8 KW Motor A Gasolina, Pretul: CÓDIGO: 26034 CLAVE: GEN-25PDocumento3 páginasGenerador Portátil 2.8 KW Motor A Gasolina, Pretul: CÓDIGO: 26034 CLAVE: GEN-25Pal221511243Aún no hay calificaciones
- 50 Preguntas para Empezar Una Conversación - Small Talk in SpanishDocumento8 páginas50 Preguntas para Empezar Una Conversación - Small Talk in SpanishElenaIordanAún no hay calificaciones
- Procedimiento Constructivo de Una Vivienda de Albañileria Confinada - Ing. Genaro Delgado C.Documento108 páginasProcedimiento Constructivo de Una Vivienda de Albañileria Confinada - Ing. Genaro Delgado C.Patricia A Cossi A93% (57)
- Bomba Desplazamiento Variable A10 VSO71Documento44 páginasBomba Desplazamiento Variable A10 VSO71Marcoglm100% (3)
- La Señalización TurísticaDocumento5 páginasLa Señalización TurísticaOperadora Puriq AimlessAún no hay calificaciones
- Ejercicios BioinformaticaDocumento9 páginasEjercicios BioinformaticaMailyn Stephany Porras GarciaAún no hay calificaciones
- Taller de Musicalizada 1â°Documento6 páginasTaller de Musicalizada 1â°Kevin BarriosAún no hay calificaciones
- Actividad Unidad 4Documento6 páginasActividad Unidad 4dulceAún no hay calificaciones
- 2 Resumen Ejecutivo 20221123 100747 831Documento8 páginas2 Resumen Ejecutivo 20221123 100747 831Asesoría y Consultoria.Aún no hay calificaciones
- Antena HD CaseraDocumento7 páginasAntena HD CaseraLUIS FERNANDO SANDOVAL CRUZAún no hay calificaciones
- Ejercicios Mat1Documento10 páginasEjercicios Mat1Gaby Zuñiga RamosAún no hay calificaciones
- Colecna VS FenazaDocumento65 páginasColecna VS FenazaAlfredo CarballoAún no hay calificaciones
- 4HJ1 InfoDocumento4 páginas4HJ1 Infopankituna5487100% (2)
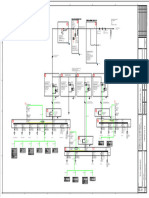
- Diagrama Unifilar Actualizado - Tr1Documento1 páginaDiagrama Unifilar Actualizado - Tr1miguelAún no hay calificaciones
- Compro Banter Ad Icac I OnDocumento1 páginaCompro Banter Ad Icac I OnCarolina Delgado VillalobosAún no hay calificaciones
- 1 - Mod 1 Fuel Syste Jan 2015Documento105 páginas1 - Mod 1 Fuel Syste Jan 2015Jose luis ConsuegraAún no hay calificaciones
- Texto Ejercicio Imagenes 1Documento2 páginasTexto Ejercicio Imagenes 1MacarenaAún no hay calificaciones
- Pensum Gnóstico Tema IntroductorioDocumento5 páginasPensum Gnóstico Tema IntroductorioRrgnos RrgnosAún no hay calificaciones
- Leyes de Los VentiladoresDocumento18 páginasLeyes de Los VentiladoresFrancisco EricesAún no hay calificaciones
- Derecho MineroDocumento12 páginasDerecho MineroJuan CruzAún no hay calificaciones
- Biografia de Agustina RoblesDocumento8 páginasBiografia de Agustina RoblesFernando Cardenas RoblesAún no hay calificaciones
- Mecanismos de Defensa y AnsiedadesDocumento4 páginasMecanismos de Defensa y AnsiedadesSebastian CastilloAún no hay calificaciones
- Espondilodiscitis Infecciosa Del AdultoDocumento33 páginasEspondilodiscitis Infecciosa Del Adultoalyson089100% (1)
- 2023 Programa Introducción A La HistoriaDocumento21 páginas2023 Programa Introducción A La Historia99zsb67v55Aún no hay calificaciones