También podría gustarte
- Deduccion de La Formula de TorsionDocumento9 páginasDeduccion de La Formula de Torsionjose100% (2)
- EIM - 2018-07-14 - 19-13-26 - Calculo de EjesDocumento11 páginasEIM - 2018-07-14 - 19-13-26 - Calculo de EjesDiego ArmandoAún no hay calificaciones
- Tema 2. Unidades, Cantidades y Vectores - CONTINUACIÓNDocumento10 páginasTema 2. Unidades, Cantidades y Vectores - CONTINUACIÓNNancy Lisbeth Figueredo GutierrezAún no hay calificaciones
- TP 4 Ensayo Indirecto de Un Motor Trifasico de InduccionDocumento6 páginasTP 4 Ensayo Indirecto de Un Motor Trifasico de Induccionpablo100% (1)
- Vatimetro ElectrodinamicoDocumento20 páginasVatimetro ElectrodinamicoDianaMartinezAún no hay calificaciones
- Ondas Estacionarias y SWRDocumento17 páginasOndas Estacionarias y SWRJC RTAún no hay calificaciones
- Masa Efectiva de Electrones y AgujerosDocumento12 páginasMasa Efectiva de Electrones y AgujerosChuchin Nose QueAún no hay calificaciones
- PreguntaDocumento1 páginaPreguntaJurgen Guerra RamosAún no hay calificaciones
- Guía de Trabajo # 4 - ElectromagnetismoDocumento3 páginasGuía de Trabajo # 4 - ElectromagnetismoANYELA CARRASCAL CASTILLAAún no hay calificaciones
- Circuito R-C paralelo: admitancia y ángulo de faseDocumento6 páginasCircuito R-C paralelo: admitancia y ángulo de faseYean Guere LavadoAún no hay calificaciones
- Electronica de Potencia I UACM San Lorenzo Tezonco Sesion 6Documento19 páginasElectronica de Potencia I UACM San Lorenzo Tezonco Sesion 6josemat79Aún no hay calificaciones
- Fuentes de Campo MagnéticoDocumento5 páginasFuentes de Campo MagnéticoGio ASAún no hay calificaciones
- Corriente Alterna y Onda SenoidalDocumento32 páginasCorriente Alterna y Onda SenoidalIng. Omar SerranoAún no hay calificaciones
- Jeanpierre Dinamica 1Documento10 páginasJeanpierre Dinamica 1Jean Pierre Yupanqui CabreraAún no hay calificaciones
- Analisisde Circuitos Equivalentesenlineasde Transmisionde Longitud LargaDocumento16 páginasAnalisisde Circuitos Equivalentesenlineasde Transmisionde Longitud LargaluiscliadgsAún no hay calificaciones
- CalculosDocumento4 páginasCalculosWilson RicardoAún no hay calificaciones
- Técnicas para El Análisis de Redes Eléctricas en Corriente Alterna-1590972207Documento34 páginasTécnicas para El Análisis de Redes Eléctricas en Corriente Alterna-1590972207Peter Jonathan Murillo LajeAún no hay calificaciones
- Corriente AlternaDocumento10 páginasCorriente AlternaSergio BeltranAún no hay calificaciones
- S09.s2-Material de CAF2-SolucionarioDocumento28 páginasS09.s2-Material de CAF2-SolucionarioJC Chavez100% (1)
- Clase 281Documento30 páginasClase 281Santiago SanchezAún no hay calificaciones
- Escribir Aquí El Título Del Material: Circuitos L-R-CDocumento11 páginasEscribir Aquí El Título Del Material: Circuitos L-R-CAndreaAún no hay calificaciones
- P9TPN 7Documento12 páginasP9TPN 7Maxi AbdalaAún no hay calificaciones
- Clase 1 de TORSIÓNDocumento24 páginasClase 1 de TORSIÓNFer RodriguezAún no hay calificaciones
- Potencial eléctrico y energía potencialDocumento23 páginasPotencial eléctrico y energía potencialMrulrerAún no hay calificaciones
- Torsión - EjerciciosDocumento26 páginasTorsión - EjerciciosyyarinAún no hay calificaciones
- Electrónica de Potencia UACM San Lorenzo Sesion 7Documento27 páginasElectrónica de Potencia UACM San Lorenzo Sesion 7josemat79Aún no hay calificaciones
- Clase 1 Carga ElectricaDocumento41 páginasClase 1 Carga ElectricaJuan Manuel CcotoAún no hay calificaciones
- Laboratorio Fisica 3 Curvas EquipotencialesDocumento14 páginasLaboratorio Fisica 3 Curvas EquipotencialeshugoAún no hay calificaciones
- Embragues y Frenos de Tambor de Expansión Interna DISEÑO IIDocumento20 páginasEmbragues y Frenos de Tambor de Expansión Interna DISEÑO IIOmer OrtegaAún no hay calificaciones
- Solucions 1Documento7 páginasSolucions 1Alejandro Villaverde GulíasAún no hay calificaciones
- FUERZA - Magnética Sobre Un ConductorDocumento10 páginasFUERZA - Magnética Sobre Un ConductorMarlon JC100% (1)
- Impedancia de Una Linea DesacopladaDocumento8 páginasImpedancia de Una Linea DesacopladaSergio Andrey Pulido RubianoAún no hay calificaciones
- Practica 3 de LabDocumento9 páginasPractica 3 de LabMauricio Obando CuevaAún no hay calificaciones
- FUERZA - Magnética Sobre Un ConductorDocumento10 páginasFUERZA - Magnética Sobre Un ConductorDamaris QuishpeAún no hay calificaciones
- Introduccion - TorsionDocumento7 páginasIntroduccion - TorsionRosalinda Barrios de la cruzAún no hay calificaciones
- Marco Teorico Maquinas AsincronasDocumento4 páginasMarco Teorico Maquinas AsincronasVictor JimenezAún no hay calificaciones
- Carpeta Curso Instalador ElectricistaDocumento21 páginasCarpeta Curso Instalador ElectricistaRicardo AlvarezAún no hay calificaciones
- Guía No.1 Parte 3Documento9 páginasGuía No.1 Parte 3Alexander SaahAún no hay calificaciones
- Escribir Aquí El Título Del Material: Circuitos L-R-CDocumento11 páginasEscribir Aquí El Título Del Material: Circuitos L-R-CLimber Llashac ChavezAún no hay calificaciones
- ENGRANAJES CÓNICOS Y SUS TIPOSDocumento27 páginasENGRANAJES CÓNICOS Y SUS TIPOSAprendiendo con Zarate y sus amigos ,Aún no hay calificaciones
- T4.1 José Del Carmen Cruz HernándezDocumento28 páginasT4.1 José Del Carmen Cruz HernándezJC CruzAún no hay calificaciones
- Ley Biot-Savart campo magnéticoDocumento6 páginasLey Biot-Savart campo magnéticoShyrla100% (1)
- Maquinas Electricas S3 Transformadores Monofasicos Parte 1Documento17 páginasMaquinas Electricas S3 Transformadores Monofasicos Parte 1AlternoAún no hay calificaciones
- Diseño de EjesDocumento39 páginasDiseño de EjesRichard JimenezAún no hay calificaciones
- Circuito RLCDocumento2 páginasCircuito RLCcarolina.yanaraAún no hay calificaciones
- Circuitos L-R-C en CADocumento16 páginasCircuitos L-R-C en CARobert SalinasAún no hay calificaciones
- Campo Magnético Del SolenoideDocumento12 páginasCampo Magnético Del SolenoideWilliam R Vargas AAún no hay calificaciones
- Tensor de FaradayDocumento14 páginasTensor de FaradayJose ramon cornelio torresAún no hay calificaciones
- SP Puentes ResuDocumento16 páginasSP Puentes ResuLizandro Alderete CuellarAún no hay calificaciones
- Campo Eléctrico en El Vacío Campo MagnéticoDocumento2 páginasCampo Eléctrico en El Vacío Campo MagnéticoDana Wara Lizarazu EscaleraAún no hay calificaciones
- Circuito Derivador/integradorDocumento6 páginasCircuito Derivador/integradorSergioLopezCornejoAún no hay calificaciones
- Lab 6 - Circuito RCDocumento12 páginasLab 6 - Circuito RCpaula lopezAún no hay calificaciones
- DIAPOSITIVAS GRUPO 1 Campo MagnéticoDocumento24 páginasDIAPOSITIVAS GRUPO 1 Campo MagnéticoDionelAún no hay calificaciones
- UNIDAD 04 Mecanica RacionalDocumento34 páginasUNIDAD 04 Mecanica RacionalRenzo TiconaAún no hay calificaciones
- 4.2. Radiación y 4.3. Análisis Del Dipolo Eléctrico ElementalDocumento25 páginas4.2. Radiación y 4.3. Análisis Del Dipolo Eléctrico Elementaloswaldo cuevasAún no hay calificaciones
- Ex. Fis. Experimental 2022-2Documento6 páginasEx. Fis. Experimental 2022-2Andre PinoAún no hay calificaciones
- Parcial 1 AstronomíaDocumento5 páginasParcial 1 AstronomíaAndrés F. AgredoAún no hay calificaciones
- Sistema de combustible B412Documento24 páginasSistema de combustible B412Andrés F. AgredoAún no hay calificaciones
- Practica de Laboratorio No 4 Distribucion de La Presion en Un CilindroDocumento5 páginasPractica de Laboratorio No 4 Distribucion de La Presion en Un CilindroAndrés F. AgredoAún no hay calificaciones
- AeroelasticidadDocumento6 páginasAeroelasticidadAndrés F. AgredoAún no hay calificaciones
- Diarios de Motocicleta - Análisis Escena Discurso de Ernesto Guevara en Su Paso Por PerúDocumento6 páginasDiarios de Motocicleta - Análisis Escena Discurso de Ernesto Guevara en Su Paso Por PerúAndrés F. AgredoAún no hay calificaciones
- Guia 4.iii Periodo. Balanceo de EcuacionesDocumento6 páginasGuia 4.iii Periodo. Balanceo de EcuacionesAndrés F. AgredoAún no hay calificaciones
- Preparation of Papers For AIAA Technical Conferences 2Documento8 páginasPreparation of Papers For AIAA Technical Conferences 2Andrés F. AgredoAún no hay calificaciones
- Descripción Del Proceso de FundiciónDocumento3 páginasDescripción Del Proceso de FundiciónAndrés F. AgredoAún no hay calificaciones
- Equilibrio ácido base y solubilidadDocumento2 páginasEquilibrio ácido base y solubilidadcarlo0% (2)
- ELEM 19 2 Diseno BujesDocumento42 páginasELEM 19 2 Diseno BujesAndrés F. AgredoAún no hay calificaciones
- ELEM 09 1 Embragues y FrenosDocumento17 páginasELEM 09 1 Embragues y FrenosAndrés F. AgredoAún no hay calificaciones
- B.3 Maquinas Electricas DC 2018 I DigicampusDocumento58 páginasB.3 Maquinas Electricas DC 2018 I DigicampusAndrés F. AgredoAún no hay calificaciones
- Actividad 3 - DinámicaDocumento2 páginasActividad 3 - DinámicaAndrés F. Agredo0% (1)
- Datos PersonalizadosDocumento1 páginaDatos PersonalizadosAndrés F. AgredoAún no hay calificaciones
- Situacià N Geopolã - TicaDocumento11 páginasSituacià N Geopolã - TicaAndrés F. AgredoAún no hay calificaciones
- Diseño de funicular de doble vía con recuperación de transmisión de potenciaDocumento5 páginasDiseño de funicular de doble vía con recuperación de transmisión de potenciaAndrés F. AgredoAún no hay calificaciones
- ELEM 09 1 Embragues y FrenosDocumento17 páginasELEM 09 1 Embragues y FrenosAndrés F. AgredoAún no hay calificaciones
- Recomendación PersonalDocumento1 páginaRecomendación PersonalAndrés F. AgredoAún no hay calificaciones
- Actividades Numericas 5Documento3 páginasActividades Numericas 5Yudixa Karreño56% (9)
- Parcial 1Documento3 páginasParcial 1Andrés F. AgredoAún no hay calificaciones
- Teoria Tat AerodinámicaDocumento3 páginasTeoria Tat AerodinámicaAndrés F. AgredoAún no hay calificaciones
- CristologíaDocumento2 páginasCristologíaAndrés F. AgredoAún no hay calificaciones
- ProbabilidadDocumento11 páginasProbabilidadAndrés F. AgredoAún no hay calificaciones
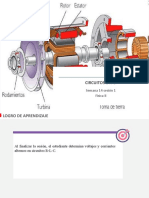
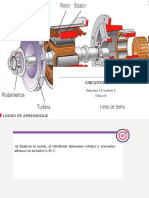
- Fuerzas sobre álabes de turbinas: flexión y tracciónDocumento3 páginasFuerzas sobre álabes de turbinas: flexión y tracciónAndrés F. AgredoAún no hay calificaciones
- Elementos de Máquina Capitulo 2Documento1 páginaElementos de Máquina Capitulo 2Andrés F. AgredoAún no hay calificaciones
- Lopez Luisa 2012Documento172 páginasLopez Luisa 2012Felix Rojas Chicoma100% (1)
- Planificación de La Unidad Vocales 1°Documento14 páginasPlanificación de La Unidad Vocales 1°catalina becerraAún no hay calificaciones
- Rangel Perez Actividad2.4Documento4 páginasRangel Perez Actividad2.4Monica RangelAún no hay calificaciones
- Modelos de InvestariosDocumento54 páginasModelos de InvestariosJuan Francisco Gabriel Valtierra GarciaAún no hay calificaciones
- El Proceso Penal Peruano y Sus Implicancias Con Un Sistema Acusatorio Con Rasgos Adversariales - Nelvin Espinoza GuzmánDocumento41 páginasEl Proceso Penal Peruano y Sus Implicancias Con Un Sistema Acusatorio Con Rasgos Adversariales - Nelvin Espinoza GuzmánNelvin Espinoza GuzmánAún no hay calificaciones
- Fisiología Del Sistema NerviosoDocumento78 páginasFisiología Del Sistema NerviosoEmiliano A. DorelleAún no hay calificaciones
- TallerDocumento13 páginasTallerLuis PiñeresAún no hay calificaciones
- La Evolucion de Los Objetos - CompressDocumento8 páginasLa Evolucion de Los Objetos - CompressEleu MaAún no hay calificaciones
- PólizasDocumento3 páginasPólizasGABRIELA FLOREZ NEIRAAún no hay calificaciones
- UNI - Microeconomía - Sesión 4-6Documento70 páginasUNI - Microeconomía - Sesión 4-6alexAún no hay calificaciones
- MUSCULO PTERIGOIDEO LATERAL Resumen AnatomiaDocumento3 páginasMUSCULO PTERIGOIDEO LATERAL Resumen AnatomiaJhasmin LuqueAún no hay calificaciones
- Taller 7 Estadística IIDocumento4 páginasTaller 7 Estadística IISalomé EstradaAún no hay calificaciones
- Guia 9° Religion Primer Periodo Virtudes MoralesDocumento2 páginasGuia 9° Religion Primer Periodo Virtudes MoralesJULIAN SNEIDER100% (1)
- Con La Segunda Bandera en El Frente de Aragon by Francisco Cavero Y Cavero (Z-Lib - Org) .fb2Documento92 páginasCon La Segunda Bandera en El Frente de Aragon by Francisco Cavero Y Cavero (Z-Lib - Org) .fb2Felipe QuintoAún no hay calificaciones
- Ejer Grafcet Solucionario PDFDocumento26 páginasEjer Grafcet Solucionario PDFramondeleonAún no hay calificaciones
- Sanchez, Florencio - El Desalojo PDFDocumento34 páginasSanchez, Florencio - El Desalojo PDFJosévvv100% (1)
- Panfleto #01 - El Cielo Abierto - Jose Bates 1846Documento29 páginasPanfleto #01 - El Cielo Abierto - Jose Bates 1846Jose Estuardo Ventura GutierrezAún no hay calificaciones
- Lic. Luis Alberto Becerra PérezDocumento35 páginasLic. Luis Alberto Becerra PérezLuz Sedano100% (2)
- Lecheria IndicadoresDocumento48 páginasLecheria IndicadoresDaniela Durán VelásquezAún no hay calificaciones
- Catálogo Kolorines 2010Documento61 páginasCatálogo Kolorines 2010UzielAún no hay calificaciones
- Técnica de Anestesia Por Bloqueo Del Maxilar SuperiorDocumento4 páginasTécnica de Anestesia Por Bloqueo Del Maxilar SuperiorCesar Laguna HuancaAún no hay calificaciones
- Preoperacional Almacenamietno Kit de Rescate en AlturasDocumento1 páginaPreoperacional Almacenamietno Kit de Rescate en AlturasRosy CasulaAún no hay calificaciones
- El Poder Terapéutico Del PerdónDocumento2 páginasEl Poder Terapéutico Del PerdónRobert Richards100% (1)
- Glosario Ovino - Caprino 2 CorteDocumento13 páginasGlosario Ovino - Caprino 2 CorteCarol Daniela GarzonAún no hay calificaciones
- Copia de Matriz Peligros Riesgos y Ep Obras CivilesDocumento9 páginasCopia de Matriz Peligros Riesgos y Ep Obras CivilesguillermoAún no hay calificaciones
- Navistar Manual de Taller DT466 & I530eDocumento377 páginasNavistar Manual de Taller DT466 & I530eCesar Soto90% (303)
- Fiat TempraDocumento2 páginasFiat TempraNachi ToAún no hay calificaciones
- SOLUCIONARIO DOM 10 DicDocumento50 páginasSOLUCIONARIO DOM 10 DicCarmen Rosa Castro DiazAún no hay calificaciones
- Bioplástico de almidón: una alternativa sostenibleDocumento3 páginasBioplástico de almidón: una alternativa sostenibleluz2429Aún no hay calificaciones
- P2L1SDocumento5 páginasP2L1SkijhgfAún no hay calificaciones