También podría gustarte
- Libro de Electronica AplicadaDocumento252 páginasLibro de Electronica Aplicadajdferreira1Aún no hay calificaciones
- Libro de Protecciones Electricas..Documento234 páginasLibro de Protecciones Electricas..wuilcalixAún no hay calificaciones
- Infoplc Net ProyectoDocumento40 páginasInfoplc Net ProyectoSergio LiraAún no hay calificaciones
- Conversores DC-DC - Diferentes TopologíasDocumento142 páginasConversores DC-DC - Diferentes TopologíasEugenio NanniAún no hay calificaciones
- Sensepoint XCL Installation Manual Eng 20170405Documento54 páginasSensepoint XCL Installation Manual Eng 20170405jcastell100Aún no hay calificaciones
- CMC 256Documento116 páginasCMC 256Andres RaymondAún no hay calificaciones
- Calculo de Bobinas y Nucleo Maquinas Electricas 1Documento23 páginasCalculo de Bobinas y Nucleo Maquinas Electricas 1Paulo flores diaz100% (1)
- 02 Manual Tema 2Documento71 páginas02 Manual Tema 2Olvan SuazoAún no hay calificaciones
- NASTESISDocumento292 páginasNASTESISJuan100% (3)
- Aplicaciones de La Electrònica 2010Documento280 páginasAplicaciones de La Electrònica 2010Humberto Reyes EspinosaAún no hay calificaciones
- Control Remoto de Ventanas Automaticas PDFDocumento90 páginasControl Remoto de Ventanas Automaticas PDFamiguitoAún no hay calificaciones
- TFG BerthaLorenzoOchoaDocumento74 páginasTFG BerthaLorenzoOchoaMarios ClubsAún no hay calificaciones
- Mesa de Pruebas para Determinar Pérdidas en Carga y en Vacío A Transformadores de DistribuciónDocumento101 páginasMesa de Pruebas para Determinar Pérdidas en Carga y en Vacío A Transformadores de DistribuciónAlex MartinezAún no hay calificaciones
- PG 2400Documento107 páginasPG 2400Eric Kevin Cervantes torresAún no hay calificaciones
- Indice IedDocumento4 páginasIndice IedJavier Salas0% (1)
- Flujometro Magnetico Serie K 2020.en - EsDocumento27 páginasFlujometro Magnetico Serie K 2020.en - Esramon gonzalezAún no hay calificaciones
- Electrotecnia IDocumento76 páginasElectrotecnia IHugo AlmadaAún no hay calificaciones
- OXIMETRO DE PULSO MEDIAID 900 - Manual - Span - SMDocumento82 páginasOXIMETRO DE PULSO MEDIAID 900 - Manual - Span - SMGonzaloAún no hay calificaciones
- InformeDocumento103 páginasInformeNelson Porco MolloAún no hay calificaciones
- IFC050 Manual de UsuarioDocumento96 páginasIFC050 Manual de UsuarioJavier VazquezAún no hay calificaciones
- Análisis de circuitos eléctricos. Un enfoque teóricoDe EverandAnálisis de circuitos eléctricos. Un enfoque teóricoAún no hay calificaciones
- Cargador de Baterías Basado en Un Circuito de Bypass ActivoDocumento145 páginasCargador de Baterías Basado en Un Circuito de Bypass ActivoAriel Cruz SusañoAún no hay calificaciones
- 4. MANUAL DE ELECTRONICA BASICA 2014Documento67 páginas4. MANUAL DE ELECTRONICA BASICA 2014José Alfredo LopezAún no hay calificaciones
- Dispositivos activos de microondasDocumento146 páginasDispositivos activos de microondasJosefina SanmiguelAún no hay calificaciones
- ElectronicaDocumento111 páginasElectronicaIsaac Rodriguez100% (2)
- En 305 Magflux Manual 1212Documento150 páginasEn 305 Magflux Manual 1212Jaime RiveraAún no hay calificaciones
- Sistema MecatroDocumento110 páginasSistema MecatroGILBERTO RAMIREZ LEDEZMAAún no hay calificaciones
- Contenido. Circuitos Eléctricos - Dorf. AlfaomegaDocumento7 páginasContenido. Circuitos Eléctricos - Dorf. AlfaomegaAndres MartinezAún no hay calificaciones
- Oximetro PDFDocumento116 páginasOximetro PDFtony8rzepaAún no hay calificaciones
- pqm-700 Insobs v1104 EsDocumento86 páginaspqm-700 Insobs v1104 EsNicolas Pastine SepulvedaAún no hay calificaciones
- Apuntes de Electrotecnia 2004Documento111 páginasApuntes de Electrotecnia 2004ALEXANDRA ALVAREZ BERRIOSAún no hay calificaciones
- Formulas Cuk Pag 71Documento126 páginasFormulas Cuk Pag 71ezequiel becerraAún no hay calificaciones
- Tesis Master Sistema Eléctrico Con Paneles FotovoltaicoDocumento77 páginasTesis Master Sistema Eléctrico Con Paneles FotovoltaicoCesarAún no hay calificaciones
- Manual de Pruebas A Equipos Primarios de Subestaciones EléctricasDocumento81 páginasManual de Pruebas A Equipos Primarios de Subestaciones Eléctricasingenierobasilio100% (3)
- 7UT SIEMENS Tesis Calculos PDFDocumento91 páginas7UT SIEMENS Tesis Calculos PDFcadafitoAún no hay calificaciones
- Manual Amplificador Yamaha RX-v4aDocumento325 páginasManual Amplificador Yamaha RX-v4aJose AngelAún no hay calificaciones
- Nueva modulación vectorial continua y convertidor puente-H dualDocumento152 páginasNueva modulación vectorial continua y convertidor puente-H dualJunior ReyesAún no hay calificaciones
- Manual Generador de SeñalesDocumento24 páginasManual Generador de Señaleshumberto morales suarezAún no hay calificaciones
- 43b Guia de AplicacionesDocumento84 páginas43b Guia de AplicacionesFRANCISCO ESCAMILLA G.Aún no hay calificaciones
- Guía de instalación para viviendasDe EverandGuía de instalación para viviendasCalificación: 5 de 5 estrellas5/5 (1)
- Carvajal Alcon, Guido GonzaloDocumento175 páginasCarvajal Alcon, Guido GonzaloGonzalo Mamani QuispeAún no hay calificaciones
- GHA BA AGS531443-01 11-17 ES Web PDFDocumento96 páginasGHA BA AGS531443-01 11-17 ES Web PDFjuanAún no hay calificaciones
- Pruebas ElectricasDocumento84 páginasPruebas ElectricasEdgar MartinezzAún no hay calificaciones
- 223941392-Principios-de-Electricidad-y-Electronica-Tomo-III PDFDocumento240 páginas223941392-Principios-de-Electricidad-y-Electronica-Tomo-III PDFAngel Perez100% (4)
- Diseño de Celdas Analógicas de Un Circuito Integrado para Medida de Impedancias Por Telemetría InductivaDocumento42 páginasDiseño de Celdas Analógicas de Un Circuito Integrado para Medida de Impedancias Por Telemetría InductivaEsteban MuñozAún no hay calificaciones
- 75-Serie CU Rev1 Manual Instrucciones IndexDocumento48 páginas75-Serie CU Rev1 Manual Instrucciones IndexJuan Ernesto Monforte IsidroAún no hay calificaciones
- TESIS Navarro - Pereira Revisià N 2Documento137 páginasTESIS Navarro - Pereira Revisià N 2Jorge Antonio Ramírez MedinaAún no hay calificaciones
- Sistema de Potencia-Tecsup PDFDocumento311 páginasSistema de Potencia-Tecsup PDFDamian80% (5)
- Nomenclatura de Instalaciones V6.0Documento48 páginasNomenclatura de Instalaciones V6.0marcosAún no hay calificaciones
- Guía de instalación para locales de pública concurrenciaDe EverandGuía de instalación para locales de pública concurrenciaCalificación: 5 de 5 estrellas5/5 (1)
- Riesgos eléctricos y mecánicos - 1ra ediciónDe EverandRiesgos eléctricos y mecánicos - 1ra ediciónAún no hay calificaciones
- Análisis de circuitos eléctricos Estado estableDe EverandAnálisis de circuitos eléctricos Estado estableCalificación: 5 de 5 estrellas5/5 (8)
- Telecomunicación Analógica: Principios de simulación y tratamiento de señalDe EverandTelecomunicación Analógica: Principios de simulación y tratamiento de señalCalificación: 1 de 5 estrellas1/5 (2)
- Instalaciones de puesta a tierra y protección de sistemas eléctricosDe EverandInstalaciones de puesta a tierra y protección de sistemas eléctricosCalificación: 5 de 5 estrellas5/5 (1)
- Fundamentos de electrónica analógicaDe EverandFundamentos de electrónica analógicaCalificación: 5 de 5 estrellas5/5 (1)
- KNX. Domótica e Inmótica: Guía Práctica para el instaladorDe EverandKNX. Domótica e Inmótica: Guía Práctica para el instaladorCalificación: 5 de 5 estrellas5/5 (1)
- Manual de inspección en las instalaciones de viviendas y 100 pos.fallosDe EverandManual de inspección en las instalaciones de viviendas y 100 pos.fallosAún no hay calificaciones
- Convenio Donación AUCAPATADocumento2 páginasConvenio Donación AUCAPATAkev_rodryAún no hay calificaciones
- Convenio Borrador Infraestructura COIPASADocumento3 páginasConvenio Borrador Infraestructura COIPASAkev_rodryAún no hay calificaciones
- Desarrollo Bolo 1Documento42 páginasDesarrollo Bolo 1kev_rodryAún no hay calificaciones
- Carta Horas AcademicasDocumento1 páginaCarta Horas Academicaskev_rodryAún no hay calificaciones
- Convenio Donacion Mapiri ModificadoDocumento3 páginasConvenio Donacion Mapiri Modificadokev_rodryAún no hay calificaciones
- Avances Examen de GradoDocumento26 páginasAvances Examen de Gradokev_rodryAún no hay calificaciones
- Desarrollo Bolo 2Documento42 páginasDesarrollo Bolo 2kev_rodryAún no hay calificaciones
- Convenio Donación TAHUADocumento2 páginasConvenio Donación TAHUAkev_rodryAún no hay calificaciones
- CaratulaDocumento3 páginasCaratulakev_rodryAún no hay calificaciones
- Desarrollo Bolo 2Documento42 páginasDesarrollo Bolo 2kev_rodryAún no hay calificaciones
- CaratulaDocumento3 páginasCaratulakev_rodryAún no hay calificaciones
- Desarrollo Bolo 1Documento42 páginasDesarrollo Bolo 1kev_rodryAún no hay calificaciones
- Carta Horas AcademicasDocumento1 páginaCarta Horas Academicaskev_rodryAún no hay calificaciones
- Avances Examen de GradoDocumento26 páginasAvances Examen de Gradokev_rodryAún no hay calificaciones
- TDR CS No 034-2021dddDocumento9 páginasTDR CS No 034-2021dddDaniel Salvador Salas BacciAún no hay calificaciones
- ROTULODocumento1 páginaROTULOkev_rodryAún no hay calificaciones
- Desarrollo Bolo 3Documento33 páginasDesarrollo Bolo 3kev_rodryAún no hay calificaciones
- Reglamento Examen Grado Ingeniería Electrónica UTBDocumento22 páginasReglamento Examen Grado Ingeniería Electrónica UTBkev_rodryAún no hay calificaciones
- Formulario Aval Pasos Tutor Revisor Estudiante II 2018Documento2 páginasFormulario Aval Pasos Tutor Revisor Estudiante II 2018kev_rodryAún no hay calificaciones
- Primer Parcial RedesDocumento10 páginasPrimer Parcial Redeskev_rodryAún no hay calificaciones
- Argumentos para El Debate de Las Técnicas PDFDocumento7 páginasArgumentos para El Debate de Las Técnicas PDFAdrian SalazarAún no hay calificaciones
- Que Es Power PointDocumento3 páginasQue Es Power PointInternet KadmielAún no hay calificaciones
- Segundo Parcial Ccna 3 MarzoDocumento3 páginasSegundo Parcial Ccna 3 MarzoRuth EsperanzaAún no hay calificaciones
- Actividad Fa Sem3 Pro402Documento4 páginasActividad Fa Sem3 Pro402Nathacha Silva RiveroAún no hay calificaciones
- Enero-Abril 2023 Grado: Fundamentos de La Ingeniería de Software. 1762Documento5 páginasEnero-Abril 2023 Grado: Fundamentos de La Ingeniería de Software. 1762Cesar Augusto Peña RomeroAún no hay calificaciones
- Programa de Gestión Documental - PGD - v2 (1) SicDocumento33 páginasPrograma de Gestión Documental - PGD - v2 (1) SicandreaAún no hay calificaciones
- Laboratorios Nro6Documento7 páginasLaboratorios Nro6riber solano taco chañiAún no hay calificaciones
- Logistica de Abestecimiento y Compras InformeDocumento4 páginasLogistica de Abestecimiento y Compras Informehector aranedaAún no hay calificaciones
- Actividad 4 TICsDocumento7 páginasActividad 4 TICsMAXIELEYS GIBSONAún no hay calificaciones
- Área de Gestión Del CronogramaDocumento4 páginasÁrea de Gestión Del CronogramajsestoAún no hay calificaciones
- Catalago de ElectronicaDocumento21 páginasCatalago de ElectronicaCristian SorianoAún no hay calificaciones
- Generación de histogramas a partir de muestras simuladas de patrones aleatoriosDocumento13 páginasGeneración de histogramas a partir de muestras simuladas de patrones aleatoriosFiliberto CaamalAún no hay calificaciones
- Georreferenciacion Viviendas AisladasDocumento17 páginasGeorreferenciacion Viviendas AisladasFISICORAN ING.CIVILAún no hay calificaciones
- Simulación de procesos químicos UNICALDocumento38 páginasSimulación de procesos químicos UNICALHenry MezaJav100% (1)
- Amplificador OperacionalDocumento15 páginasAmplificador OperacionalAB Francisco JuanAún no hay calificaciones
- 01 FHWA 2006-10 RTécnico&RepasoDocumento30 páginas01 FHWA 2006-10 RTécnico&RepasoMabustasAún no hay calificaciones
- Ebook-Aggylon GESTIONAR TU MARCA DE MANERA EFICIENTE CON 5 PASOSDocumento14 páginasEbook-Aggylon GESTIONAR TU MARCA DE MANERA EFICIENTE CON 5 PASOSPaolaAún no hay calificaciones
- Cap 7. Ing. SoftwareDocumento145 páginasCap 7. Ing. SoftwareKevin William Baylon HuertaAún no hay calificaciones
- 1° y 2° PARCIAL QCA GENERAL 2023 - TURNO TARDEDocumento7 páginas1° y 2° PARCIAL QCA GENERAL 2023 - TURNO TARDELucía AlonsoAún no hay calificaciones
- Marina Villalvir Módulo 3.Documento7 páginasMarina Villalvir Módulo 3.Marina isabel Villalvir jacintoAún no hay calificaciones
- Cto 27 Del G10Documento2 páginasCto 27 Del G10waldeir guarnizoAún no hay calificaciones
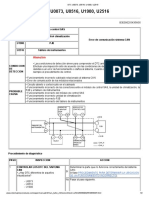
- DTC U0073, U0516, U1900, U2516Documento2 páginasDTC U0073, U0516, U1900, U2516Repuestos MaceiraAún no hay calificaciones
- AP - ISW - SV81 - Clavijo Mestas Omar Alonso - InformFinalDocumento19 páginasAP - ISW - SV81 - Clavijo Mestas Omar Alonso - InformFinalWilliam AnguloAún no hay calificaciones
- RV Fundamentos Arquitectura CaracterísticasDocumento23 páginasRV Fundamentos Arquitectura CaracterísticasMelquisedec Chavez OtinianoAún no hay calificaciones
- Word Ejercicio 3Documento2 páginasWord Ejercicio 3Sama Sydalg Reichel100% (1)
- Solución analítica y numérica de ecuaciones integrales de FredholdDocumento6 páginasSolución analítica y numérica de ecuaciones integrales de FredholdGiovanny PradoAún no hay calificaciones
- Nicole TeoriaDocumento9 páginasNicole TeoriacarolinaAún no hay calificaciones
- Checklist Organización Archivo Talento HumanoDocumento9 páginasChecklist Organización Archivo Talento HumanoIveth Lucia Caro PintoAún no hay calificaciones
- Tarea Programacion Segundo ParcialDocumento10 páginasTarea Programacion Segundo Parcialisaac barahonaAún no hay calificaciones
- Evaluacion Continua T1 Getao Ug 2022-1Documento3 páginasEvaluacion Continua T1 Getao Ug 2022-1Luis Ronaldo Núñez CaluaAún no hay calificaciones