Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Collazos2017 en Es
Cargado por
Claudia CruzTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Collazos2017 en Es
Cargado por
Claudia CruzCopyright:
Formatos disponibles
Un modelo físico simple de la marcha humana utilizando principios de cinemática
y BTS GAITLAB
CA Collazos, HE Castellanos, JA Cardona, JC Lozano, A. Gutiérrez, MA Riveros
Universidad Manuela Beltrán, Bogotá, Colombia
cacollazos@gmail.com
Resumen- El objetivo de este trabajo es presentar el principio factores de riesgo que presentan estos sujetos, como caídas por
cinemático de la marcha unidimensional, con el fin de identificar los alteraciones en la estabilidad y control del equilibrio del organismo [6]
parámetros cinemáticos para cada tipo de marcha asociados con el [7], [8].
movimiento lineal uniforme y el movimiento uniformemente El objetivo de este trabajo es comparar el análisis de la marcha
acelerado. Este artículo presenta el principio cinemático de la marcha con sujetos sanos y patológicos. En esta investigación, la marcha
unidimensional, con el fin de identificar los parámetros cinemáticos patológica se refiere a la amputación transtibial de la marcha
de la marcha normal y patológica (amputación transtibial) de dos
protésica. Las técnicas de análisis de movimiento utilizadas para
sujetos con antropometría similar. El modelo físico desarrollado
medir con precisión las curvas cinemáticas se obtienen a través de
complementa la información del sistema de adquisición de datos y se
marcadores de piel, que registran la posición, velocidad y aceleración
utiliza para la enseñanza de la Física Mecánica en Biomédica.
Ingeniería y Fisioterapia. de un segmento corporal. Estas medidas proporcionan información
cuantitativa sobre el movimiento [9].
Palabras clave-Marcha, cinemática, modelado, física. En [10], [11], [12], [13] se presenta una revisión completa del modelado
y simulación de la marcha humana. Esta revisión de investigación se
centra en simulaciones de caminar humanas basadas en la física en la
I
I. NTRODUCCIÓN literatura de biomecánica y robótica. Los métodos de síntesis de la
marcha se dividen ampliamente en cinco tipos: modelo de péndulo
El análisis de la marcha es la medición y evaluación de la invertido; dinámica pasiva caminando; métodos de punto de momento
locomoción humana que incluye caminar y correr [1]. Estos cero; métodos basados en optimización; y métodos basados en el
movimientos, conocidos como reflejos estereotipados, se control [11]. Los modelos mencionados anteriormente son muy complejos
caracterizan por ser repetitivos en el tiempo cuando la velocidad por los métodos y principios involucrados.
y la aceleración son constantes [2]. Por tanto, es posible obtener
curvas de referencia en cada fase del movimiento que podrían
Este artículo describe un modelo físico simple de la marcha
ayudar a determinar anomalías o patologías relacionadas con el
humana de la marcha normal y patológica a una velocidad y
sistema musculoesquelético y modificar el comportamiento
aceleración constantes. Identificamos los parámetros cinemáticos
normal [3].
para cada tipo de marcha y comparamos las curvas cinemáticas
Los diferentes tejidos que intervienen durante la marcha, a saber:
presentadas en cada uno de los casos.
músculos, tendones, cartílagos, ligamentos, tejido conectivo (fascia) y
El artículo está estructurado de la siguiente manera: La sección II
el componente óseo, realizan distintas funciones como la generación
muestra los fundamentos de la cinemática y los principios de la física. La
de movimiento, transmisión de potencia, carga amortiguadora,
sección III muestra la instrumentación utilizada y los marcadores
estabilización articular de segmentos, entre otras. Estas funciones
asociados para la evaluación de la marcha. En la sección IV se presenta la
son la base del movimiento y por ello son constantemente
identificación de los parámetros cinemáticos relacionados con la marcha y
analizadas y evaluadas para determinar alteraciones que modifiquen
las herramientas matemáticas. Finalmente, la Sección V está dedicada a
su desempeño [4], [5].
las discusiones y conclusiones.
Los sujetos con amputaciones de miembros inferiores, tienen
ajustes compensatorios en la marcha donde los tejidos blandos y el
estrés mecánico del cuerpo deben ajustarse a los cambios II. FUNDAMENTALES DE LO UNIDIMENSIONAL
estructurales y funcionales en este. Esto sugiere un aumento de la CINEMÁTICA
demanda muscular, el gasto de energía, la alineación del centro de Para un modelo lineal de posición en movimiento lineal uniforme, el
gravedad y el centro de masa, la alineación postural estática y
polinomio de primer grado viene dado por: ( ŷ a bx). Para norte
dinámica, entre otros. Estos parámetros son relevantes para medir el
pares de datos, los parámetros de regresión a y B se refieren a (1) y
(2) respectivamente como:
© Springer Nature Singapore Pte Ltd. 2017 333
I. Torres y col. (eds.),VII Congreso Latinoamericano de Ingeniería Biomédica CLAIB 2016,
Bucaramanga, Santander, Colombia, 26 al 28 de octubre de 2016,
Actas de IFMBE 60,
DOI: 10.1007 / 978-981-10-4086-3_84
334 CA Collazos y col.
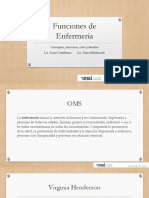
norte 2 norte norte norte El dispositivo tiene 3 marcadores colocados estratégicamente
xi yi xi xi yi
I 1I1 I 1I1
(1) como indica la Fig. 1. Los marcadores implicados en la marcha
a
2 fueron el sacro (marcador 6), el trocánter mayor derecho (marcador
xi2
norte norte
norte xi 7) y el trocánter mayor izquierdo (marcador 8). El estudio del
I 1 I1 movimiento en este trabajo se limita únicamente al eje X.
norte norte norte
norte xi yi xi yi
I1 I1 I1 (2)
B
2
norte norte
norte XI2 XI
I 1 I1
Para una posición sin modelo lineal en movimiento uniformemente
acelerado, en un modelo parabólico, el polinomio de segundo grado
es dado: ( ŷ a bx cx2). Para norte pares de datos, el
parámetros de regresión a, b y C se refieren a (3), (4), (5),
(6), (7), (8), (9) y (10) de la siguiente manera:
S (x2 y) S (xx) S (xy) S (xx2) (3)
a
S (xx) S (x2X2) S (xx2) 2
Fig. 1. Disposición de los marcadores cutáneos en el cuerpo humano [16]
S (xy) S (x2X2) S (X2 y) S (xx2) IV. METROÉTODO, RESULTADOS Y ANÁLISIS
B (4)
2
S (xx ) S (x X S (xX2)
2 2)
Para el análisis de los datos se utilizaron los métodos de mínimos
cuadrados y coeficiente de correlación. La prueba se aplicó por dos
sujetos de (34 1) años de edad, hombre, altura (1,64 0,01) m
norte norte norte
yI B XI a XI 2
(5) y masa de (64 0,1) kg. El primer sujeto tiene unilateral
C I1 I1 I1
norte amputación transtibial de la extremidad inferior derecha. El
segundo sujeto tiene una marcha normal y una antropometría
como la del primer sujeto. El estudio fue aprobado por los
dónde: Comités de Ética de la Universidad Manuela Beltrán.
norte norte
XI yI Las figuras 2 y 3 muestran datos experimentales en línea de puntos y
(6)
norte
I1 I 1
S (xy) XI yI modelos en línea negra continua. Usamos cuadrados para Marcha normal
I1 norte
norte norte
y puntos para Marcha patológica. Las unidades para todas las variables y
XI XI 2
parámetros están representadas en el Sistema de Unidades
(7)
norte
S (xx2) XI 3 I1 I1 Internacionales.
I1 norte
norte norte
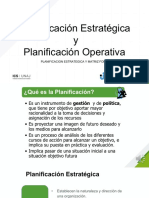
A. Marcha normal y patológica con velocidad constante
XI2 yI
(9)
norte
S (x2 y) XI y2 I I1 I1
La Fig.2 ilustra las trayectorias para Normal y
I1 norte
norte
2 Marcha patológica. Esta figura indica la posición registrada
XI 2 hacia el sacro (marcador 6) y la interpolación lineal de las dos
(9) trayectorias. Aquí, se observa que existe una alta correlación
norte
S (x2 X2) XI 4 I1
I1 norte entre el modelo y los datos experimentales para la marcha
Usamos los fundamentos de la cinemática unidimensional para normal. Esta correlación es significativamente estadística (
identificar los parámetros cinemáticos para cada tipo de marcha r 0,997). La identificación del modelo permite determinar
asociados con el movimiento lineal uniforme y el movimiento la posición inicial X0 = -2,13 m) y la velocidad media de la
uniformemente acelerado [9], [15].
marcha ( v =0 1,00 m / s). El modelo del puesto en función
III. INSTRUMENTACIÓN
Por tanto, el tiempo para la marcha normal es x (t) 2.13 1.00t. Nosotros
Para el registro de datos se utilizó el Laboratorio de Biomecánica de la
observó que existe una alta correlación b entre el modelo
Universidad Manuela Beltrán. Usamos BTS GAITLAB [16]. Este sistema de
y los datos experimentales para la marcha patológica. Esta
adquisición de alta precisión para análisis de movimiento cuenta con seis
correlación es estadísticamente significativa (r 0,997). La
cámaras optoelectrónicas que miden el desplazamiento (
identificación del modelo permite determinar la inicial
10 7 metro) de segmentos corporales en el tiempo (10 2 s ).
Actas de IFMBE Vol. 60
Un modelo físico simple de la marcha humana utilizando principios de cinemática y BTS GAITLAB 335
posición ( X0 = -2,12 m) y la velocidad media de la marcha ( En consecuencia, la marcha normal es x (t) 2,13 0,99t. La
La identificación del modelo de marcha patológica determina
v0=0,60 m / s). El modelo de la posición en función del tiempo.
la posición inicial X0 = -2,12 m) y la velocidad media en
para la marcha patológica es, por tanto, x (t) 2,12 0,60t. Usamos
a diferencia porcentual definido como:
la marcha v0 =0,59 m / s). En este caso, el coeficiente de correlación es
control experimental .100%, para comparar Normal r 0,996. El modelo de la posición en función del tiempo para la
%MI
control marcha patológica es, en consecuencia x (t) 2,12 0,59t. En
Marcha (valor de control) y Marcha patológica (valor este caso obtenemos una diferencia porcentual de%E =40,00% para
experimental) velocidad promedio. En este caso obtenemos una velocidad media.
diferencia porcentual de%E =39,60%.
B. Normal y Marcha patológica con constante
aceleración
La figura 3 ilustra las trayectorias de la marcha normal y
patológica. La Figura 5 indica la posición registrada hacia el
sacro (marcador 6) y la interpolación cuadrática de las dos
trayectorias. La identificación del
El modelo permite determinar la posición inicial ( X0 = -2,13 m),
velocidad inicial ( v0 = -1,09 m / s) y la mitad de la aceleración
media (0,90 m / s2) para la marcha normal. Existe una alta
correlación entre el modelo y los datos experimentales (
r 0,997). El modelo de la posición en función del tiempo para
En consecuencia, la marcha normal es x
(t) 2,13 1,09t 0,90t2.
La identificación del modelo de marcha patológica
determina la posición inicial ( X0 = -2,27 m), velocidad inicial (
v0 = -0,31 m / s) y la mitad de la aceleración media (0,29 m / s2).
Fig.2 La posición-gráfico de tiempo en el eje X para el sacro con constante Existe una alta correlación entre el modelo y el
datos experimentales ( r
velocidad.
0,997). En consecuencia, el modelo de la
La posición registrada hacia el trocánter mayor derecho posición en función del tiempo para la marcha patológica es
(marcador 7) y la interpolación lineal para Normal y
x (t) 2,27 0,31t 0,29t2. En este caso obtenemos un
La marcha patológica muestra que la posición inicial ( X0 = -213m)
diferencia porcentual para la aceleración media de%E =71% y
y la velocidad media en la marcha normal ( v0 = 1,02 m / s). de%E =67% en velocidad inicial.
Aquí se puede ver que existe una alta correlación entre la
posición y las medidas experimentales conr 0,996. Por tanto,
el modelo de la posición en función del tiempo para la
marcha normal esx (t)2,13 1,02t. La identificación del
El modelo de marcha patológica determina la posición inicial (
X0 = -2,12 m) y la velocidad media en la marcha patológica
( v0 = 0,61 m / s). Se puede observar que existe una alta
correlación entre la posición y las medidas experimentales con
r 0,996. Por tanto, el modelo de la posición en función del
tiempo para la marcha patológica esx (t)
2,12 0,61t. En este caso
obtenemos una diferencia porcentual de%E =39,60% para velocidad
media.
El registro de posición al trocánter mayor izquierdo (marcador
8) y la interpolación lineal para la marcha normal y patológica
muestran que la identificación del modelo para la marcha normal en
posición inicial ( X0 = -2,13 m) y la velocidad media en el
Fig.5 El gráfico de posición-tiempo en el eje X al sacro con constante
aceleración
andar v0 =0,99 m / s). En este caso, el coeficiente de correlación es
La posición registrada hacia el trocánter mayor derecho
r 0,996.El modelo de la posición en función del tiempo para (marcador 7) y la interpolación cuadrática para Normal y
Actas de IFMBE Vol. 60
336 CA Collazos y col.
Marcha Patológica muestran que la identificación del modelo de Afectado en sujetos con aputacion unilateral transtibial de miembros
Marcha Normal permite determinar la posición inicial ( X0 = - inferiores donde el sistema musculoesquelético y los tejidos blandos
que ayudan a mantener el mecanismo dinámico del cuerpo están
2,10 m), velocidad inicial ( v0 =1,18 m / s) y la mitad de la comprometidos. Es por ello que los competidores en suelo pélvico y
aceleración media (0,91 m / s2). Como podemos ver, existe miembros inferiores son notorios en el andar de las personas con
una alta correlación entre la posición y el experimental amputación como se puede ver en los gráficos de trayectoria. En este
sentido nuestro propósito en el futuro es establecer un modelado
mediciones ( r 0,996). Por lo tanto, el modelo de la posición
cinemático tridimensional que involucre otros marcadores como
en función del tiempo para la marcha normal es
cadera, rodilla y tobillo en función del nivel de amputación para
x (t) 2,10 1,18t 0,91t2.La identificación del modelo determinar patrones característicos en cada sujeto de estudio.
para la marcha patológica determina la posición inicial ( X0 = -
Es importante señalar que el modelado del patrón de marcha normal puede
2,27 m), velocidad inicial ( v0 = -0,33 m / s) y la mitad de la verse afectado por muchas causas, como el tamaño, la edad, el calzado, el
aceleración media (0,31 m / s2). Existe una alta correlación terreno, la carga, la actividad del sujeto, que no son necesariamente
entre el modelo y los datos experimentales ( r 0,997). patológicas sino que están relacionadas con la alteración o adaptación del
aparato locomotor. estructuras para el movimiento. En este caso podemos
El modelo de la posición en función del tiempo para Patológico.
generar en futuros trabajos para hacer comparaciones de la marcha en
En consecuencia, la marcha es x (t) 2,27 0,33t 0,31t2. Nosotros diferentes patologías.
obtener una diferencia porcentual para la aceleración promedio de%mi
= 72% y de%E =65% para la velocidad inicial.
CONFLICTO DE INTERESES
El registro de posición al trocánter mayor izquierdo (marcador 8) y
la interpolación cuadrática para la marcha normal y patológica Los autores declaran no tener ningún conflicto de intereses.
muestran que la identificación del modelo para la marcha normal
permite determinar la posición inicial ( X0 = -2,15 m), inicial REFERENCIAS
1. K. Luttgens, K. Wells, Bases científicas del movimiento humano.
velocidad v0 =1,06 m / s) y la mitad de la aceleración media (0,89 Madrid, 1982, págs.21-34.
m / s2) para la marcha normal. Aquí se puede observar que existe 2. K. Hainaut, Introducción a la Biomecánica, Barcelona, 1982, págs.31-
34.
una alta correlación entre el modelo y los datos experimentales (
3. B. Le Veau. Biomecánica del movimiento humano. México, 1991. pp.51-54.
r 0,997). El modelo de la posición en función del tiempo para
4. F. Plas, E. Viel, Y. Blanc. La marcha humana. Cinesiología dinámica,
La marcha normal es x (t) 2,15 1,06t 0,89t2. biomecánica y patomecánica.Barcelona, 1984, pág.12-24
La identificacion del modelo de Marcha Patológica 5. P. Rasch, R. Burke, Kinesiología y Anatomía aplicada, Buenos Aires,
1986, págs.25-27.
determina la posición inicial ( X0 = -2,27 m), velocidad inicial 6. Natalie Vanicek, Siobhan Strike, Lars McNaughton, Remco Polman. Patrones de marcha
( v0 = -0,30 m / s) y la mitad de la aceleración media (0,29 m / s
en personas con amputación transtibial que caen frente a personas que no lo hacen:
diferencias biomecánicas durante la marcha nivelada, Reino Unido, 2009 págs.-420. Ava
2). Existe una alta correlación entre el modelo y el 7. D. Segal, Michael S. Orendurff, Joseph M. Czerniecki, Jason Schoen, Glenn K. Klute.
Comparación de la biomecánica transtibial de amputados y no amputados durante la
datos experimentales ( r 0,997). En consecuencia, el modelo de tarea de giro común. Estados Unidos, 2011, págs. 41-
la posición en función del tiempo para la marcha patológica es 47.
8. Yoshimasa Sagawa Jr y col. Biomecánica y parámetros fisiológicos durante la marcha en
x (t) 2,27 0,30t 0,29t2. En caso de que obtengamos un amputados de miembros inferiores: una revisión sistemática. Francia, 2011 págs.511-
diferencia porcentual para la aceleración media de%E =70% y 526
9. D. Invierno, Biomecánica del Movimiento Humano, Estados Unidos, 1979, pág.-22.
de%E =67% para la velocidad inicial.
10. Y. Xiang, JS Arora, K. Abdel-Malek,Modelado y simulación basados en la física de la
IV. CONCLUSIÓN marcha humana: una revisión de los enfoques basados en la optimización y
otros, Struct Multidisc Optim 42, 2010, págs. 1-23.
11. C. Detrembleur, F. Dierick F, A. van den Hecke A, El movimiento del centro de
Este trabajo ha presentado un caso de estudio sobre la marcha gravedad del cuerpo como indicador resumido de la mecánica de la marcha
normal y patológica. Los resultados experimentales fueron validados patológica humana. Postura de la marcha 12 (3), 2010, págs. 243-250.
teóricamente para los modelos físicos y los parámetros encontrados. La
12. Y. Kalyan Chakravarthy, et al, Pierna protésica robótica basada en hápticos,
técnica utilizada involucra tres marcadores de referencia (sacro, trocánter Advances in Robotics, Mecatronics and Circuits, Proceedings of the 18th
mayor derecho e izquierdo) relacionados con el centro de masa del International Conference on Circuits (parte de CSCC '14), Santorini Island,
cuerpo humano. Los modelos identificados predicen en el tiempo Grecia, 18-20 de julio de 2014, págs. 296-302.
cantidades como la posición, la velocidad y la aceleración en los diferentes 13. Nurfarahin Onn, et al, Consideraciones de la locomoción bípeda para
tipos de movimiento con velocidad y aceleración constantes. Los órdenes diseños de exoesqueleto de miembros inferiores, Latest Trends in
Circuits, Control and Signal Processing, Actas de la 13ª Conferencia
de magnitud encontrados para los modelos físicos de posición están
Internacional sobre Robótica, Control y Tecnología de Fabricación
dentro del rango de magnitudes reportado por autores como Winter en (ROCOM '13), Kuala Lumpur, Malasia, 2-4 de abril de 2013, págs. 59-64.
[9].
14. M. Spiegel, Estadística, España, 1991, págs. 102-104.
15. R. Serway, J. Jewetter, Física para ciencias e Ingenierías, México, 2005,
Este trabajo compara modelos físicos entre la marcha pp.25-30.
normal y patológica. Se sabe que la marcha normal puede ser dieciséis. Laboratorio de marcha BTS, www.btsbioengineering.com/
Actas de IFMBE Vol. 60
También podría gustarte
- Clasificación de EngranesDocumento5 páginasClasificación de EngranesELVIS_001Aún no hay calificaciones
- Presentacion LH514Documento59 páginasPresentacion LH514Roger Anthony Zuñiga de la Rosa92% (12)
- Eje PucpDocumento8 páginasEje PucpJorge CarreraAún no hay calificaciones
- Practica-1-Quimica Aplicada EsimeDocumento17 páginasPractica-1-Quimica Aplicada Esimepato15101997Aún no hay calificaciones
- Sciu-164 Tarea U008Documento3 páginasSciu-164 Tarea U008Miguel MasgoAún no hay calificaciones
- Practica Golpe de ArieteDocumento5 páginasPractica Golpe de ArieteLalo MtzAún no hay calificaciones
- Viviana Gaviola Suplemento Salud 08.05Documento3 páginasViviana Gaviola Suplemento Salud 08.05Claudia CruzAún no hay calificaciones
- Módulo 3 Análisis InstitucionalDocumento13 páginasMódulo 3 Análisis InstitucionalClaudia CruzAún no hay calificaciones
- Funciones de EnfermeríaDocumento23 páginasFunciones de EnfermeríaClaudia CruzAún no hay calificaciones
- Planificación EstratégicaDocumento33 páginasPlanificación EstratégicaClaudia CruzAún no hay calificaciones
- Marco Teórico Como Sustento de La Formulación Del Problema de InvestigaciónDocumento5 páginasMarco Teórico Como Sustento de La Formulación Del Problema de InvestigaciónClaudia CruzAún no hay calificaciones
- Los Roles en El HospitalDocumento12 páginasLos Roles en El HospitalClaudia CruzAún no hay calificaciones
- 05 - Iontoforesis 2014Documento15 páginas05 - Iontoforesis 2014Claudia CruzAún no hay calificaciones
- Capitulo 3-BFTRDocumento17 páginasCapitulo 3-BFTRClaudia CruzAún no hay calificaciones
- Formulación de ObjetivosDocumento6 páginasFormulación de ObjetivosClaudia CruzAún no hay calificaciones
- Ha Dicho Usted Postura MKDocumento5 páginasHa Dicho Usted Postura MKClaudia CruzAún no hay calificaciones
- MasajeDocumento13 páginasMasajeClaudia Cruz0% (1)
- Ejercicio Clase Virtual BBBDocumento20 páginasEjercicio Clase Virtual BBBjuan tagliaferroAún no hay calificaciones
- Semana 3Documento14 páginasSemana 3Max DvhAún no hay calificaciones
- Sesion 2 Mexcla de GasesDocumento25 páginasSesion 2 Mexcla de GasesJoshua CamascaAún no hay calificaciones
- Tipos de Torno Formulas de OperacionDocumento6 páginasTipos de Torno Formulas de OperacionChelo GrandeAún no hay calificaciones
- Trabajo de Maquinas TérmicasDocumento4 páginasTrabajo de Maquinas TérmicasEstefany ChilconAún no hay calificaciones
- Lista de Cotejo Física 1 - Secuencia 1Documento1 páginaLista de Cotejo Física 1 - Secuencia 1Carl RangelAún no hay calificaciones
- Acondicionamiento de AireDocumento10 páginasAcondicionamiento de AireEmilio Roberto Miniel CaraballoAún no hay calificaciones
- Informe Tecnico Simulacion 2Documento13 páginasInforme Tecnico Simulacion 2savedioAún no hay calificaciones
- Parte I - Ejercicios Adicionales - Ver 2Documento4 páginasParte I - Ejercicios Adicionales - Ver 2Antonela Porta100% (1)
- Curso VP44Documento91 páginasCurso VP44Eduardo Jose Suarez AcostaAún no hay calificaciones
- P-4 Destilación Con Batch Con RectificaciónDocumento21 páginasP-4 Destilación Con Batch Con RectificaciónBernabé Machaca NúñezAún no hay calificaciones
- Despiece 0445020056Documento3 páginasDespiece 0445020056Andy Anderson Limachi PeraltaAún no hay calificaciones
- Maquinas Simples y MotorizadasDocumento2 páginasMaquinas Simples y Motorizadasandres sousa0% (1)
- Sistema de RefrigeraciónDocumento4 páginasSistema de RefrigeraciónWalter Ramirez MartinAún no hay calificaciones
- Reglaje Distribucion VariableDocumento26 páginasReglaje Distribucion VariableFeliz FerrandizAún no hay calificaciones
- Diseño y Construcción de Un Deshidratador de Frutas Con Capacidad de 1000 Gramos Utilizando Una Bomba de VacíoDocumento5 páginasDiseño y Construcción de Un Deshidratador de Frutas Con Capacidad de 1000 Gramos Utilizando Una Bomba de Vacíokaren_ka100% (1)
- Primera Unidad Examen Parcial de Modelacion y Simulacion 10A Componente TeoricoDocumento2 páginasPrimera Unidad Examen Parcial de Modelacion y Simulacion 10A Componente TeoricoEliana RozasAún no hay calificaciones
- 9 - Dinámica RotacionalDocumento4 páginas9 - Dinámica RotacionalFrank EduardoAún no hay calificaciones
- 1.3 Simbologia NeumaticaDocumento16 páginas1.3 Simbologia NeumaticaJorge Gonzales OrtizAún no hay calificaciones
- Informe Numero 2orgIIDocumento3 páginasInforme Numero 2orgIIMARCELO PAEZ CORTESAún no hay calificaciones
- Seguridad en Soldadura Por ResistenciaDocumento4 páginasSeguridad en Soldadura Por ResistenciaJosé Antonio MedinaAún no hay calificaciones
- Partes de Una Dobladora Hidraulica PDFDocumento4 páginasPartes de Una Dobladora Hidraulica PDFDilber JayrAún no hay calificaciones
- Trabajo Lubricacion PDFDocumento233 páginasTrabajo Lubricacion PDFwilliamAún no hay calificaciones
- Informe de Pasantias Eder Padron Enero 2010Documento40 páginasInforme de Pasantias Eder Padron Enero 2010jvgotopoAún no hay calificaciones