También podría gustarte
- Trasformaciones LinealesDocumento21 páginasTrasformaciones Linealesemilianogarcia18Aún no hay calificaciones
- Investigación de ÁlgebraDocumento23 páginasInvestigación de ÁlgebraMontserrat RosadoAún no hay calificaciones
- Transformaciones LinealesDocumento5 páginasTransformaciones LinealesDaisy Sanchez100% (1)
- Transformaciones LinealesDocumento11 páginasTransformaciones LinealesRamon JacoboAún no hay calificaciones
- Transformaciones lineales: definición, propiedades y aplicaciones en ingenieríaDocumento12 páginasTransformaciones lineales: definición, propiedades y aplicaciones en ingenieríaJulio FriasAún no hay calificaciones
- AlgebraDocumento25 páginasAlgebraEmerson UbacAún no hay calificaciones
- Aplicación LinealDocumento5 páginasAplicación LinealCRISTIAN ENRIQUE CASTILLO BARRIENTOSAún no hay calificaciones
- Transformaciones LinealesDocumento15 páginasTransformaciones LinealesAdilene ValenzuelaAún no hay calificaciones
- Tema 5 Algebra LinealDocumento14 páginasTema 5 Algebra LinealChavez nabor David pabloAún no hay calificaciones
- Transformaciones LinealesDocumento12 páginasTransformaciones LinealesAdrián Fernández100% (1)
- Ceron Perez Wendy Saray INfografia Semana 7Documento1 páginaCeron Perez Wendy Saray INfografia Semana 7Wendy PerezAún no hay calificaciones
- Algebra LinealDocumento9 páginasAlgebra Linealpaola sanchezAún no hay calificaciones
- Trabajo Unidad 5 AlgebraDocumento27 páginasTrabajo Unidad 5 AlgebraRicardo Flores50% (4)
- Aplicaciones LinealesDocumento4 páginasAplicaciones LinealesDaniel MartínAún no hay calificaciones
- 5.1 Evaluativo - EnsayoDocumento3 páginas5.1 Evaluativo - EnsayoPedro AtunAún no hay calificaciones
- Ensayo Transformaciones Linealesdocx PDF FreeDocumento14 páginasEnsayo Transformaciones Linealesdocx PDF FreeDeymer Leonel Condori BenitoAún no hay calificaciones
- Ensayo Transformaciones LinealesDocumento14 páginasEnsayo Transformaciones LinealesAngel gonzalez cadena100% (1)
- Transformaciones LinealesDocumento9 páginasTransformaciones LinealesJosue ChavezAún no hay calificaciones
- Transformaciones Lineales 1Documento4 páginasTransformaciones Lineales 1Diego Vladimir Sanchez MedinaAún no hay calificaciones
- Aplicación LinealDocumento4 páginasAplicación LinealRicardo AqpAún no hay calificaciones
- Aplicación LinealDocumento4 páginasAplicación LinealjosgauAún no hay calificaciones
- Algrebra 2Documento19 páginasAlgrebra 2Luis Gamer CuellarAún no hay calificaciones
- Introduccion A Las Transformaciones LienealesDocumento9 páginasIntroduccion A Las Transformaciones LienealesSandii GomezAún no hay calificaciones
- Unidad 5Documento12 páginasUnidad 5Shiavonne PattAún no hay calificaciones
- Transformaciones LinealesDocumento7 páginasTransformaciones LinealesCarlos Pérez HernándezAún no hay calificaciones
- Transformaciones LinealesDocumento11 páginasTransformaciones Linealesl22750252Aún no hay calificaciones
- Tarea en Equipo U4Documento15 páginasTarea en Equipo U4JAZMINAún no hay calificaciones
- Transformaciones LinealesDocumento16 páginasTransformaciones Linealesdeisynava27Aún no hay calificaciones
- Transformaciones LinealesDocumento6 páginasTransformaciones LinealesTolando MarinezAún no hay calificaciones
- Transformación LinealDocumento9 páginasTransformación LinealKarliitha NmAún no hay calificaciones
- Transformaciones LinealesDocumento14 páginasTransformaciones Linealesiranis bravoAún no hay calificaciones
- Transformaciones LinealesDocumento11 páginasTransformaciones LinealesMiguelAngelToralRomeroAún no hay calificaciones
- Funciones VectorialesDocumento80 páginasFunciones VectorialesFer VargasAún no hay calificaciones
- Tema 5 Algebra Lineal PDFDocumento45 páginasTema 5 Algebra Lineal PDFJuan David Escobar HidalgoAún no hay calificaciones
- Transformaciones LinealesDocumento12 páginasTransformaciones LinealesRoger Isarael Castellanos ZamudioAún no hay calificaciones
- Investigacion - Transformaciones LinealesDocumento11 páginasInvestigacion - Transformaciones LinealesJatziri AmbrizAún no hay calificaciones
- Definición de Transformación LinealDocumento120 páginasDefinición de Transformación LinealEmanuel MartinezAún no hay calificaciones
- Unidad 5 de Albebra Casi TerminadaDocumento15 páginasUnidad 5 de Albebra Casi TerminadaRoberto Boyka CruzAún no hay calificaciones
- Núcleo e Imagen de Una Transformación LinealDocumento14 páginasNúcleo e Imagen de Una Transformación LinealGABRIEL AGUILAR RAMIREZAún no hay calificaciones
- Transformaciones LinealesDocumento5 páginasTransformaciones LinealesNorbis OzAún no hay calificaciones
- Investigacion AlgebraDocumento24 páginasInvestigacion AlgebraMontserrat RosadoAún no hay calificaciones
- Matrices y DeterminatesDocumento13 páginasMatrices y DeterminatesYEFRY WIN-DROIDAún no hay calificaciones
- T4 Inv Transformaciones LinealesDocumento10 páginasT4 Inv Transformaciones LinealesSamuel Spankin LeónAún no hay calificaciones
- Transformaciones Lineales - Propiedades, para Qué Sirven, Tipos, EjemplosDocumento1 páginaTransformaciones Lineales - Propiedades, para Qué Sirven, Tipos, Ejemplosjesus MarvalAún no hay calificaciones
- Ilovepdf MergedDocumento9 páginasIlovepdf MergedLuis Ángel Martínez RamírezAún no hay calificaciones
- Representación matricial T lineal Rn-RmDocumento14 páginasRepresentación matricial T lineal Rn-RmDaniel CisnerosAún no hay calificaciones
- Transformaciones LinealesDocumento19 páginasTransformaciones LinealesPAMELA PALMAAún no hay calificaciones
- Informe Sobre MatricesDocumento13 páginasInforme Sobre MatricesLilian Rivas100% (1)
- Algebra U5 InvDocumento7 páginasAlgebra U5 InvDaniel MateoAún no hay calificaciones
- Algebra Lineal Tema 5Documento46 páginasAlgebra Lineal Tema 5Cristian Jos� Rodriguez HernandezAún no hay calificaciones
- ALGEBRA LINEAL-JuanDocumento7 páginasALGEBRA LINEAL-Juanjuancaalvarez199719Aún no hay calificaciones
- Ensayo - Transformaciones LinealesDocumento13 páginasEnsayo - Transformaciones LinealesJanet CalderaAún no hay calificaciones
- Método de Cramer Concepto y 2 EjemplosDocumento8 páginasMétodo de Cramer Concepto y 2 EjemplosbreinoxAún no hay calificaciones
- Unidad 4 Funciones Vectoriales FinalDocumento16 páginasUnidad 4 Funciones Vectoriales FinalJesús Valle100% (1)
- Unidad 5Documento14 páginasUnidad 5iranis bravoAún no hay calificaciones
- Transformaciones LinealesDocumento26 páginasTransformaciones LinealesDeymer Leonel Condori BenitoAún no hay calificaciones
- Transformaciones LinealesDocumento13 páginasTransformaciones Linealesleticia amaro100% (6)
- Álgebra Lineal - Tema 5 Transformaciones LinealesDocumento6 páginasÁlgebra Lineal - Tema 5 Transformaciones Linealesrodrigo.marquez.ortega.2003Aún no hay calificaciones
- Investigacion Calculo VectorialDocumento11 páginasInvestigacion Calculo VectorialJulio SauriAún no hay calificaciones
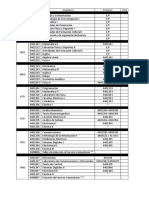
- Lista de Materias AprobadasDocumento2 páginasLista de Materias AprobadasJoffHdzz 0410Aún no hay calificaciones
- Osciladores SinusoidalesDocumento42 páginasOsciladores SinusoidalesJoffHdzz 0410Aún no hay calificaciones
- Evaluación de Estadística para Administración de EmpresasDocumento2 páginasEvaluación de Estadística para Administración de EmpresasJoffHdzz 0410Aún no hay calificaciones
- La Convención Colectiva Presentación.Documento15 páginasLa Convención Colectiva Presentación.rantlugoAún no hay calificaciones
- Instituto Universitario Politénico Santiago Mariño Ampliación Maracaibo Unidad IV Teoría de Control 3er Corte - 1er 20Documento1 páginaInstituto Universitario Politénico Santiago Mariño Ampliación Maracaibo Unidad IV Teoría de Control 3er Corte - 1er 20JoffHdzz 0410Aún no hay calificaciones
- Conformacion de Ondas 2003Documento12 páginasConformacion de Ondas 2003JoffHdzz 0410Aún no hay calificaciones
- THONYDocumento3 páginasTHONYJoffHdzz 0410Aún no hay calificaciones
- Programa de Metodología IiDocumento14 páginasPrograma de Metodología IiJoffHdzz 0410Aún no hay calificaciones
- Analisis FrecuencialDocumento133 páginasAnalisis FrecuencialJoffHdzz 0410Aún no hay calificaciones
- El muestreo estadístico para proteger la objetividad de los auditores internosDocumento11 páginasEl muestreo estadístico para proteger la objetividad de los auditores internosEdgar Lemus0% (1)
- Transformada de Fourier aplicaciones análisis señalesDocumento9 páginasTransformada de Fourier aplicaciones análisis señalesJoffHdzz 0410Aún no hay calificaciones
- AnalisisFrecuencial PDFDocumento96 páginasAnalisisFrecuencial PDFJenn AlavaAún no hay calificaciones
- 2da Evaluacion 20% 3er CorteDocumento12 páginas2da Evaluacion 20% 3er CorteJoffHdzz 0410Aún no hay calificaciones
- Met Inv. II (24-01)Documento5 páginasMet Inv. II (24-01)JoffHdzz 0410Aún no hay calificaciones
- 2do Corte 10 % - Finaliza El 15.11.2021Documento3 páginas2do Corte 10 % - Finaliza El 15.11.2021JoffHdzz 0410Aún no hay calificaciones
- Actividad #3 - FILTROS PASO BAJO, PASO ALTO, PASA BANDA - Jofrank H V-28407880Documento8 páginasActividad #3 - FILTROS PASO BAJO, PASO ALTO, PASA BANDA - Jofrank H V-28407880JoffHdzz 0410Aún no hay calificaciones
- Referencia Personal Hermano José GregorioDocumento1 páginaReferencia Personal Hermano José GregorioJoffHdzz 0410Aún no hay calificaciones
- 2do Corte 20 % - Finaliza El 04.12.2021Documento1 página2do Corte 20 % - Finaliza El 04.12.2021JoffHdzz 0410Aún no hay calificaciones
- C Mo Formular El T Tulo de Un Proyecto de Investigaci NDocumento1 páginaC Mo Formular El T Tulo de Un Proyecto de Investigaci NKelly OrdoñezAún no hay calificaciones
- UNIDAD IV - Tarea 1 Cuestionario. Sistemas DDocumento5 páginasUNIDAD IV - Tarea 1 Cuestionario. Sistemas DJoffHdzz 0410Aún no hay calificaciones
- Unidad IIIDocumento26 páginasUnidad IIIMariela J SandovalAún no hay calificaciones
- 2do Corte 10 % - Finaliza El 15.11.2021Documento3 páginas2do Corte 10 % - Finaliza El 15.11.2021JoffHdzz 0410Aún no hay calificaciones
- Recuerda Que El Trabajo No Debe Pasar de Los 2 Megabytes para QueDocumento2 páginasRecuerda Que El Trabajo No Debe Pasar de Los 2 Megabytes para QueJoffHdzz 0410Aún no hay calificaciones
- Trabajo II - Matematicas IVDocumento9 páginasTrabajo II - Matematicas IVJoffHdzz 0410Aún no hay calificaciones
- Representación y operaciones con números complejosDocumento19 páginasRepresentación y operaciones con números complejosJoffHdzz 0410Aún no hay calificaciones
- Reducción de OrdenDocumento4 páginasReducción de OrdenJoffHdzz 0410Aún no hay calificaciones
- Diseño de planta automatizada para tratamiento de aguas residualesDocumento10 páginasDiseño de planta automatizada para tratamiento de aguas residualesMarielsy CarruyoAún no hay calificaciones
- Capitulo 3Documento29 páginasCapitulo 3Fernanda PinAún no hay calificaciones
- Rango de Una Transformacion LinealDocumento2 páginasRango de Una Transformacion LinealJoffHdzz 0410Aún no hay calificaciones
- Práctico SistemasDocumento9 páginasPráctico SistemasJuanca LopezAún no hay calificaciones
- Asignatura UNED MatemáticasDocumento5 páginasAsignatura UNED Matemáticaszooropa1844945Aún no hay calificaciones
- Postarea - Evaluación Final (POC)Documento13 páginasPostarea - Evaluación Final (POC)Melissa Ceron100% (1)
- Clases de Matrices Triangular Inferior, Triangular SuperiorDocumento7 páginasClases de Matrices Triangular Inferior, Triangular SuperiorRodrigo Fernando ObregonAún no hay calificaciones
- Álgebra Lineal Tema 5. Transformaciones Lineales: Autores: J. S, A. T E.J.S. VDocumento16 páginasÁlgebra Lineal Tema 5. Transformaciones Lineales: Autores: J. S, A. T E.J.S. VFredy CaroAún no hay calificaciones
- Trabajo Investigacion de OperacionesDocumento11 páginasTrabajo Investigacion de Operacionesgerardo reynaAún no hay calificaciones
- Fundamentos Matemáticos de La Ingeniería - KindelanDocumento567 páginasFundamentos Matemáticos de La Ingeniería - KindelanJulian Prieto100% (1)
- Unidad I Calculo IIIDocumento32 páginasUnidad I Calculo IIIjongualjosescribdAún no hay calificaciones
- Ejercicio 2Documento8 páginasEjercicio 2jesus valdesAún no hay calificaciones
- PROGRAMA Algebra Lineal (H) 202120-CorredorDocumento16 páginasPROGRAMA Algebra Lineal (H) 202120-CorredorRamón TámaraAún no hay calificaciones
- Tarea2 - Campos VectorialesDocumento3 páginasTarea2 - Campos VectorialesArturo Moreno Jr.Aún no hay calificaciones
- Esquema MatricesDocumento2 páginasEsquema MatricesMery RouseAún no hay calificaciones
- Funciones Vectoriales de Una Variable RealDocumento38 páginasFunciones Vectoriales de Una Variable Realallan joel puente salomonAún no hay calificaciones
- Regla de CramerDocumento3 páginasRegla de CramerAnonymous 37bt9hK3Aún no hay calificaciones
- 103 MPE - Teorema Fundamental de Las Transformaciones Lineales - NC PRELIMINAR (2020-08)Documento6 páginas103 MPE - Teorema Fundamental de Las Transformaciones Lineales - NC PRELIMINAR (2020-08)Tiago KapobelAún no hay calificaciones
- Usuarios con libros pendientesDocumento42 páginasUsuarios con libros pendientesOsbert Meléndez PeñaAún no hay calificaciones
- Solución de La HT - Seminario de Preparación para Examen Parcial-2Documento6 páginasSolución de La HT - Seminario de Preparación para Examen Parcial-2JUANAún no hay calificaciones
- Solucionario Analisis Matematico III PDFDocumento370 páginasSolucionario Analisis Matematico III PDFluisentropiaAún no hay calificaciones
- Operaciones Matriciales Taller Practico Actividad 8Documento15 páginasOperaciones Matriciales Taller Practico Actividad 8Alejo CanoAún no hay calificaciones
- Guia, Tips para MathematicaDocumento1 páginaGuia, Tips para MathematicazhazzuAún no hay calificaciones
- CG-Sem2-PARALELISMO Y ORTOGONALIDAD DE VECTORESDocumento18 páginasCG-Sem2-PARALELISMO Y ORTOGONALIDAD DE VECTORESRoberto TruelovetrueloveAún no hay calificaciones
- Cálculo Vectorial: Examen Final 2Documento2 páginasCálculo Vectorial: Examen Final 2Aedb3Aún no hay calificaciones
- Análisis multivariante métodosDocumento304 páginasAnálisis multivariante métodosJavier RuizAún no hay calificaciones
- Matrices LCP 201Documento19 páginasMatrices LCP 201Zombra QshowAún no hay calificaciones
- Matrices FINALDocumento35 páginasMatrices FINALBrajan Chumpitaz SeguraAún no hay calificaciones
- Cap 07 IntroAnálisisMatricialFinalDocumento6 páginasCap 07 IntroAnálisisMatricialFinalPierina Cordova FloresAún no hay calificaciones
- Calculo VectorialDocumento9 páginasCalculo VectorialSebastián SandovalAún no hay calificaciones
- Microsoft Excel en La SoluciÓn de Problemas de Álgebra LinealDocumento29 páginasMicrosoft Excel en La SoluciÓn de Problemas de Álgebra Linealapi-3719542100% (4)
- Ina 022 Analisis Matematico IiDocumento4 páginasIna 022 Analisis Matematico Iimacarena lunaAún no hay calificaciones
- Gradiente, divergencia y rotacionalDocumento13 páginasGradiente, divergencia y rotacionalJesus CorvachoAún no hay calificaciones