También podría gustarte
- 5to A TermodinamicaDocumento7 páginas5to A TermodinamicanicolasAún no hay calificaciones
- Informe Estatica - Grupo 1Documento13 páginasInforme Estatica - Grupo 1Alessandro ArévaloAún no hay calificaciones
- Metodo HuberDocumento5 páginasMetodo HuberLuis VerenzuelaAún no hay calificaciones
- La Escala de Conflicto de Rol de Género OneilDocumento2 páginasLa Escala de Conflicto de Rol de Género OneilPsicoterapeuta Alejandro Pimentel ChaveraAún no hay calificaciones
- Metodos de Control MicrobianoDocumento18 páginasMetodos de Control Microbianojeremias75% (8)
- 1.3 Notación SigmaDocumento3 páginas1.3 Notación SigmaLUIS ANGEL POETA100% (1)
- Deber O1 Geo - CaratulaDocumento19 páginasDeber O1 Geo - CaratulaElyGomezAún no hay calificaciones
- ALGEBRADocumento44 páginasALGEBRAMaru Sanchez100% (1)
- Segunda Condicion de EquilibrioDocumento9 páginasSegunda Condicion de EquilibrioCarmen CahuayaAún no hay calificaciones
- Trabajo 1 de Estructura Algebraica I PDFDocumento4 páginasTrabajo 1 de Estructura Algebraica I PDFMiller Plamer100% (1)
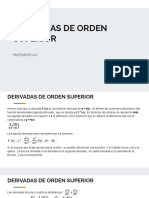
- Derivadas de Orden Superior y Derivadas ImplicitasDocumento42 páginasDerivadas de Orden Superior y Derivadas ImplicitasJavier VallejosAún no hay calificaciones
- Estudio de Costos y Tarifas Del Servicio PublicoDocumento75 páginasEstudio de Costos y Tarifas Del Servicio PublicoDiana TolozaAún no hay calificaciones
- BermeoAlexander - Calidad de AguaDocumento8 páginasBermeoAlexander - Calidad de AguaAlexxander Bermeo100% (1)
- CINEMÁTICADocumento9 páginasCINEMÁTICAGabriel CalderonAún no hay calificaciones
- Triangulo de PascalDocumento6 páginasTriangulo de PascalJesus Sanchez SAún no hay calificaciones
- Laboratorio - 2 Fisica Laboratorio UTPDocumento13 páginasLaboratorio - 2 Fisica Laboratorio UTPVíctor RosasPlayerAún no hay calificaciones
- Solucionguiatrigogrupo 1Documento29 páginasSolucionguiatrigogrupo 1api-2701912867% (3)
- Taller Dinamica2 PDFDocumento19 páginasTaller Dinamica2 PDFAngel David Torres MosqueraAún no hay calificaciones
- Formulario de Física 1Documento2 páginasFormulario de Física 1J. JESUS ORTIZ CALVILLOAún no hay calificaciones
- Prelab Practica 8 Emision de Luz de CationesDocumento13 páginasPrelab Practica 8 Emision de Luz de CationesKrisztofer CzollerAún no hay calificaciones
- Hoja de Trabajo Límites de Funciones EjerciciosDocumento4 páginasHoja de Trabajo Límites de Funciones EjerciciosJeff Llanos OrihuelaAún no hay calificaciones
- S10 Movimiento ParabolicoDocumento13 páginasS10 Movimiento ParabolicoEstefany AcostaAún no hay calificaciones
- 4to MeibiDocumento4 páginas4to MeibiMilton Rolando Ac MaczAún no hay calificaciones
- Tablas y Triangulos NotablesDocumento15 páginasTablas y Triangulos NotablesbilsanAún no hay calificaciones
- Derivadas de Funciones Trigonometricas InversasDocumento4 páginasDerivadas de Funciones Trigonometricas InversasDOCENTE MATEMATICAS GUILLERMO LUIS MUÑOZ RODRIGUEZAún no hay calificaciones
- 02 AngulosDocumento13 páginas02 AngulosJuanito ZavalaAún no hay calificaciones
- Vectores EjerciciosDocumento5 páginasVectores EjerciciosGallegos DiegoAún no hay calificaciones
- Ejercicio 1Documento2 páginasEjercicio 1Andres Avendaño AgudeloAún no hay calificaciones
- 01probabilidad P1Documento40 páginas01probabilidad P1Milenka AlbaAún no hay calificaciones
- LOGARITMOSDocumento7 páginasLOGARITMOSsebastian AndresAún no hay calificaciones
- Ejercicios de Vectores UPAODocumento4 páginasEjercicios de Vectores UPAOLuis Delgado FloresAún no hay calificaciones
- 1.4 Cifras SignificativasDocumento4 páginas1.4 Cifras SignificativasgloriaAún no hay calificaciones
- Tarea - 1 Examen CalificadoDocumento2 páginasTarea - 1 Examen CalificadoAlexander Castrejón MestanzaAún no hay calificaciones
- Tema1 PDFDocumento12 páginasTema1 PDFHNOS CERRO NAVARRO100% (1)
- Sec.2,6 Límites Al InfinitoDocumento3 páginasSec.2,6 Límites Al InfinitoJorge Emilio Pérez DuranAún no hay calificaciones
- Suma de Vectores Método AnalíticoDocumento3 páginasSuma de Vectores Método AnalíticoMaurilio Isem100% (1)
- Uso de La Geometria AnaliticaDocumento16 páginasUso de La Geometria AnaliticaAlexander Lopez0% (2)
- Algoritmos C++Documento3 páginasAlgoritmos C++valerAún no hay calificaciones
- Informe 7 Momento de Inercia UTPDocumento17 páginasInforme 7 Momento de Inercia UTPAlexander Moran100% (1)
- Clase#65Documento15 páginasClase#65Dionisio de Jesus Calero CerdaAún no hay calificaciones
- Libro Problemas Matematicas Biologia Uah M Marva J RuizDocumento79 páginasLibro Problemas Matematicas Biologia Uah M Marva J RuizPaola GomezAún no hay calificaciones
- Trabajo Y Potencia Rotacionales.: Subtema 2.5.2. Movimiento de Rotacion de Un Cuerpo Rigido I.IDocumento4 páginasTrabajo Y Potencia Rotacionales.: Subtema 2.5.2. Movimiento de Rotacion de Un Cuerpo Rigido I.IJassiel EspinoAún no hay calificaciones
- Factores de Inercia A La Rotacion IDocumento4 páginasFactores de Inercia A La Rotacion ICinthia Carrion100% (1)
- Taller 4 Movimiento en Dos DimensionesDocumento4 páginasTaller 4 Movimiento en Dos Dimensioneshader cuestaAún no hay calificaciones
- Objetivos y Marco Teoricos de LEY DE HOOKEDocumento1 páginaObjetivos y Marco Teoricos de LEY DE HOOKESantigo Sanchez CastroAún no hay calificaciones
- Ley de Hooke - Ejercicios Resueltos - FisimatDocumento6 páginasLey de Hooke - Ejercicios Resueltos - FisimatEmerson Ipiales GudiñoAún no hay calificaciones
- Anexo 1Documento12 páginasAnexo 1Oscar Niño Bernal0% (1)
- Tarea 2 Trigonometría 1Documento6 páginasTarea 2 Trigonometría 1Génesis Pamela Bautista Sánchez100% (1)
- Marco TeoricoDocumento3 páginasMarco TeoricoFrank Ortega0% (1)
- Funciones y CaracteristicasDocumento7 páginasFunciones y CaracteristicasLaura Daniela CIFUENTES LISARAZOAún no hay calificaciones
- Ecuaciones Lineales Y CuadraticasDocumento4 páginasEcuaciones Lineales Y Cuadraticasdarwin ortegaAún no hay calificaciones
- Mapa Cognitivo de Algoritmo (Leyes de Newton)Documento3 páginasMapa Cognitivo de Algoritmo (Leyes de Newton)Edward Saldaña100% (1)
- Libro Guia TrigonometriaDocumento57 páginasLibro Guia TrigonometriaMaya MontoyaAún no hay calificaciones
- Vectores 2DDocumento30 páginasVectores 2Djulio cesarAún no hay calificaciones
- Guía de Ejercicios de Ondas (Física)Documento10 páginasGuía de Ejercicios de Ondas (Física)Laureano NavarroAún no hay calificaciones
- Ejer Excel 5Documento6 páginasEjer Excel 5andraAún no hay calificaciones
- LabFS100 Informe2 Gráficos - 20192002076Documento11 páginasLabFS100 Informe2 Gráficos - 20192002076Carlos Alberto SortoAún no hay calificaciones
- Fundamentos de Estática y DinamicaDocumento191 páginasFundamentos de Estática y DinamicaJesus Wheel VelazquezAún no hay calificaciones
- 418 Iam SucesionesDocumento73 páginas418 Iam Sucesioneszoraida carrasco100% (1)
- Aritmetica - Capitulo 03Documento12 páginasAritmetica - Capitulo 03Mónica Fabiola Teran EnriquezAún no hay calificaciones
- Calculo II - T3Documento1 páginaCalculo II - T3Juan Jose Buhezo SotoAún no hay calificaciones
- Mov. Lineal Sobre Un Plano Inclinado.Documento11 páginasMov. Lineal Sobre Un Plano Inclinado.Tania ArmendarizAún no hay calificaciones
- Ejercicios Algebra LinealDocumento23 páginasEjercicios Algebra LinealRudolf FiAún no hay calificaciones
- Problemas de Impulso y ColisionesDocumento3 páginasProblemas de Impulso y ColisionesBenjamin CastilloAún no hay calificaciones
- KFIS1 U2 ContenidoDocumento54 páginasKFIS1 U2 ContenidoAntonio ArandaAún no hay calificaciones
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraDe EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAún no hay calificaciones
- PROYECTO AL ROJO VIVO FísicayQuímica.2ºESO 1Documento10 páginasPROYECTO AL ROJO VIVO FísicayQuímica.2ºESO 1nicolasAún no hay calificaciones
- Naturales. Secundaria. Fenómenos TérmicosDocumento12 páginasNaturales. Secundaria. Fenómenos TérmicosnicolasAún no hay calificaciones
- ACFrOgBqgV61DMinV8F45ir0p TPvXxkatbx5DRYwI67gntsMImsmzc497qakNwxbUSs1Ubm 3sVqASeVkntezPcbq6otU Iy oIhKHSTeUqfDS8NllAGc1h0CZQVDSwYSvVZudVibezQn-6JtZpDocumento21 páginasACFrOgBqgV61DMinV8F45ir0p TPvXxkatbx5DRYwI67gntsMImsmzc497qakNwxbUSs1Ubm 3sVqASeVkntezPcbq6otU Iy oIhKHSTeUqfDS8NllAGc1h0CZQVDSwYSvVZudVibezQn-6JtZpnicolasAún no hay calificaciones
- 2 - Termodinámica - Procesos CuasiestáticosDocumento27 páginas2 - Termodinámica - Procesos CuasiestáticosnicolasAún no hay calificaciones
- Plan de ClaseDocumento14 páginasPlan de ClasenicolasAún no hay calificaciones
- Plan de Clase de La Unidad de Optica Reflexion y RefraccionDocumento6 páginasPlan de Clase de La Unidad de Optica Reflexion y RefraccionnicolasAún no hay calificaciones
- Lic. Marianela Di Santo. Biología y Laboratorio IIDocumento20 páginasLic. Marianela Di Santo. Biología y Laboratorio IInicolasAún no hay calificaciones
- 1 - Termodinamica - Modelos - Termodinamicos - y - Primer - Principio 2021Documento19 páginas1 - Termodinamica - Modelos - Termodinamicos - y - Primer - Principio 2021nicolasAún no hay calificaciones
- Experimento en CasaDocumento64 páginasExperimento en Casanicolas0% (1)
- UD Tiro Parabolico-5Documento43 páginasUD Tiro Parabolico-5nicolasAún no hay calificaciones
- U1 - EstadisticaDescriptivaNewNewDocumento4 páginasU1 - EstadisticaDescriptivaNewNewArturo Alvarado SeguraAún no hay calificaciones
- Actividad 2. Evaluación de Proyectos RuralesDocumento7 páginasActividad 2. Evaluación de Proyectos RuralesmanuelaAún no hay calificaciones
- Silabo 2024 I-Comunicación I-DesarrolladoDocumento196 páginasSilabo 2024 I-Comunicación I-DesarrolladoantonichavezrojasAún no hay calificaciones
- Informe de Experimento CilindrosDocumento5 páginasInforme de Experimento CilindrosSara ToroAún no hay calificaciones
- GERMANIA BECERRA Ensayo Puente Golden Gate PDFDocumento3 páginasGERMANIA BECERRA Ensayo Puente Golden Gate PDFGermania BecerraAún no hay calificaciones
- Cuadro SinopticoDocumento2 páginasCuadro SinopticoERIC JOSHUA QUIROZ TICONAAún no hay calificaciones
- Temario de 1 Periodo GEOGRAFIADocumento1 páginaTemario de 1 Periodo GEOGRAFIAEmiliano GomezAún no hay calificaciones
- DinámicaDocumento14 páginasDinámicaFer NogalesAún no hay calificaciones
- Octavo Guía 7 Medidas y UnidadesDocumento9 páginasOctavo Guía 7 Medidas y UnidadesMIS SERIES FAVORITAS 80sAún no hay calificaciones
- Lenguaje 1°Documento13 páginasLenguaje 1°VIVIANA ANGELICA RODRIGUEZ CRUZAún no hay calificaciones
- Trabajo Final de Fisica 2014Documento2 páginasTrabajo Final de Fisica 2014Raul MejiaAún no hay calificaciones
- Arrojar BasuraDocumento5 páginasArrojar Basurajuan carlos ramirez vargasAún no hay calificaciones
- KuychiroDocumento9 páginasKuychirocarlos incarocaAún no hay calificaciones
- Sesion Comun. Descripcion 10-05.2023Documento5 páginasSesion Comun. Descripcion 10-05.2023Susy EnriquezAún no hay calificaciones
- Ley Derechos de Propiedad y Contaminacion Del Aire - Murray N RothbardDocumento163 páginasLey Derechos de Propiedad y Contaminacion Del Aire - Murray N RothbardJOSAMX80% (1)
- Analisis de Una Tubería Simple Operando Con Un Fluido Incomprensible e IsotérmicoDocumento20 páginasAnalisis de Una Tubería Simple Operando Con Un Fluido Incomprensible e IsotérmicoLino AlorAún no hay calificaciones
- Plan Haccp SidraDocumento11 páginasPlan Haccp SidraOdiado Amado100% (1)
- Peritaje Ana Cecilia 31 JulioDocumento6 páginasPeritaje Ana Cecilia 31 JulioFremao MemeAún no hay calificaciones
- CALCULO I - TP - Unidad FUNCIONES - 2021Documento10 páginasCALCULO I - TP - Unidad FUNCIONES - 2021Maite cuelloAún no hay calificaciones
- Tecnologico Nacional de MexicoDocumento14 páginasTecnologico Nacional de MexicoGerardo Valdés Jr.Aún no hay calificaciones
- Narrativa Circo Maroma y TeatroDocumento4 páginasNarrativa Circo Maroma y TeatroMeliyel Aburto PortillaAún no hay calificaciones
- Sindicalismo Docente Tiramontig PDFDocumento22 páginasSindicalismo Docente Tiramontig PDFLsv RockAún no hay calificaciones
- Materiales Asfálticos de Uso VialDocumento7 páginasMateriales Asfálticos de Uso VialLoli Meza LiuzziAún no hay calificaciones
- Examen Milena MurilloDocumento8 páginasExamen Milena MurilloMilena MurilloAún no hay calificaciones
- Matemáticas Financieras v1 - Anualidades 1.4Documento4 páginasMatemáticas Financieras v1 - Anualidades 1.4Hector AlcantarAún no hay calificaciones