También podría gustarte
- Objetivos Del Estudio de La Dinámica Del Robot Manipulador - Quinatoa DannyDocumento4 páginasObjetivos Del Estudio de La Dinámica Del Robot Manipulador - Quinatoa DannyDanny QuinatoaAún no hay calificaciones
- Ecuacion Cauchy EulerDocumento20 páginasEcuacion Cauchy EulerDanny QuinatoaAún no hay calificaciones
- Caracteristicas Tecnicas de Manipuladores de Robots Clásicos - Quinatoa P.Documento1 páginaCaracteristicas Tecnicas de Manipuladores de Robots Clásicos - Quinatoa P.Danny QuinatoaAún no hay calificaciones
- Ensayo Cuestionario III UnidadDocumento8 páginasEnsayo Cuestionario III UnidadDanny QuinatoaAún no hay calificaciones
- Resumen DiseñoSecuencialVSDiseñoConcurrenteDocumento4 páginasResumen DiseñoSecuencialVSDiseñoConcurrenteDanny QuinatoaAún no hay calificaciones
- Velasco Edwin Plan EstrategicoDocumento4 páginasVelasco Edwin Plan EstrategicoDanny QuinatoaAún no hay calificaciones
- Quinatoa - PLAN ESTRATÉGICO ENSAMBLADORA DE AUTOS AMBACARDocumento6 páginasQuinatoa - PLAN ESTRATÉGICO ENSAMBLADORA DE AUTOS AMBACARDanny QuinatoaAún no hay calificaciones
- Producto Acreditable N1Documento5 páginasProducto Acreditable N1Danny QuinatoaAún no hay calificaciones
- Deber No 1-IIP ProgramaciónDocumento14 páginasDeber No 1-IIP ProgramaciónDanny QuinatoaAún no hay calificaciones
- Grupo 1 - PLC SiemensDocumento59 páginasGrupo 1 - PLC SiemensDanny QuinatoaAún no hay calificaciones
- QuinatoaDanny - Sistemas de CoordenadasDocumento1 páginaQuinatoaDanny - Sistemas de CoordenadasDanny QuinatoaAún no hay calificaciones
- MÉCANISMOS Guia de TrabajoDocumento7 páginasMÉCANISMOS Guia de TrabajoDanny QuinatoaAún no hay calificaciones
- Informe Actuadores LinealesDocumento16 páginasInforme Actuadores LinealesDanny QuinatoaAún no hay calificaciones
- Sistemas Con Tiempo de RetardoDocumento5 páginasSistemas Con Tiempo de RetardoDanny QuinatoaAún no hay calificaciones
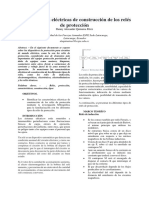
- Características Eléctricas de Construcción de Los Relés de ProtecciónDocumento4 páginasCaracterísticas Eléctricas de Construcción de Los Relés de ProtecciónDanny QuinatoaAún no hay calificaciones
- NormasDocumento4 páginasNormasDanny QuinatoaAún no hay calificaciones
- Torno CNC - TronzadoDocumento23 páginasTorno CNC - TronzadoDanny QuinatoaAún no hay calificaciones
- Sistemas Hidráulicos Cuadro SinópticoDocumento4 páginasSistemas Hidráulicos Cuadro SinópticoDanny QuinatoaAún no hay calificaciones
- ProductoAcreditable1 - Diseño de Ejes y FlechasDocumento11 páginasProductoAcreditable1 - Diseño de Ejes y FlechasDanny QuinatoaAún no hay calificaciones
- Resumen Flujo Laminar y TurbulentoDocumento2 páginasResumen Flujo Laminar y TurbulentoDanny QuinatoaAún no hay calificaciones
- Cuestionario Termofluidos Aplicados III UnidadDocumento7 páginasCuestionario Termofluidos Aplicados III UnidadDanny QuinatoaAún no hay calificaciones
- Resumen Método de La CascadaDocumento5 páginasResumen Método de La CascadaDanny QuinatoaAún no hay calificaciones
- Dinamica de Fluidos PerfectosDocumento30 páginasDinamica de Fluidos PerfectosDanny QuinatoaAún no hay calificaciones
- Tipos de CompresoresDocumento20 páginasTipos de CompresoresDanny QuinatoaAún no hay calificaciones
- Actividad 4 ENTREVISTA ORGANIZACIONALDocumento16 páginasActividad 4 ENTREVISTA ORGANIZACIONALJonathan Quintero GarciaAún no hay calificaciones
- Derecho NotarialDocumento9 páginasDerecho NotarialMiriam Yufra GirónAún no hay calificaciones
- 27) Manual de Instrucciones Registro de Orden de Compra Vinculada A SEPDocumento10 páginas27) Manual de Instrucciones Registro de Orden de Compra Vinculada A SEPalexis cuevasAún no hay calificaciones
- Instituto Campechano Ensayo Histórico de Manuel A. LanzDocumento204 páginasInstituto Campechano Ensayo Histórico de Manuel A. LanzEmilio Rod HerAún no hay calificaciones
- Contrato de Suministros Tomate Maria Nelcy LoaizaDocumento2 páginasContrato de Suministros Tomate Maria Nelcy LoaizaXimy Ro100% (1)
- Contrato Fab - Ladrillo Artesanales (TEOFANES)Documento7 páginasContrato Fab - Ladrillo Artesanales (TEOFANES)Luis SifontesAún no hay calificaciones
- Órganos Extrapoder Del Estado de GuatemalaDocumento32 páginasÓrganos Extrapoder Del Estado de GuatemalaHelen Cabrera100% (4)
- Sociedad Civil y Comprobante de PagoDocumento2 páginasSociedad Civil y Comprobante de PagoAngel Michael Palomares LiviaAún no hay calificaciones
- Acta de Apertura de Elecciones de Los Candidatos Al Comité de Convivencia Laboral CartagenaDocumento5 páginasActa de Apertura de Elecciones de Los Candidatos Al Comité de Convivencia Laboral CartagenaINSPECTOR SSTA 6 INSPECTOR SSTA 6Aún no hay calificaciones
- Finiquito LaboralDocumento2 páginasFiniquito LaboralRafael Sandoval100% (1)
- Introduccion A La Educacion en BoliviaDocumento11 páginasIntroduccion A La Educacion en BoliviaFrosito CrusitoAún no hay calificaciones
- Abandono Procedimiento Baez Garcia HernanDocumento4 páginasAbandono Procedimiento Baez Garcia HernanfernandodonosonavarroAún no hay calificaciones
- 4 Teoria y Actividad 4 Leyes de KirchhoffDocumento4 páginas4 Teoria y Actividad 4 Leyes de KirchhoffAntonioAún no hay calificaciones
- Historia Del Perú - República y OncenioDocumento6 páginasHistoria Del Perú - República y OncenioGabriel Robinson Sergio Cuba OportoAún no hay calificaciones
- B.luis - Ensayo.reinserción Social - Luis.100418Documento17 páginasB.luis - Ensayo.reinserción Social - Luis.100418Jose Luis ChavezAún no hay calificaciones
- Alcoholimetro Digital, Testeador de AlcoholemiaDocumento9 páginasAlcoholimetro Digital, Testeador de AlcoholemiaJuan SedanoAún no hay calificaciones
- Psicologia Juridica Unidad 1Documento40 páginasPsicologia Juridica Unidad 1JUAN CARLOS0% (1)
- Guia Del Alumnado ENERO 2022Documento37 páginasGuia Del Alumnado ENERO 2022YolandaAún no hay calificaciones
- Crítica de La Teoría Política de Platón - Consideraciones en Torno Al Filósofo ReyDocumento15 páginasCrítica de La Teoría Política de Platón - Consideraciones en Torno Al Filósofo ReyAlejandro Tapia San MartínAún no hay calificaciones
- Historia Clinica-Sección 2020Documento12 páginasHistoria Clinica-Sección 2020AlisonAún no hay calificaciones
- Carta Notificando No Prorroga Contrato ArrendamientoDocumento3 páginasCarta Notificando No Prorroga Contrato ArrendamientoJesus Hidalgo0% (4)
- 2019-295-Accidente Trayecto (25 04 2019)Documento12 páginas2019-295-Accidente Trayecto (25 04 2019)Edwin Enrique Salmeron SamayoaAún no hay calificaciones
- Trabajo QuimicaDocumento6 páginasTrabajo QuimicaCristina Suarez BalagueraAún no hay calificaciones
- Cuadro Sinóptico - ActividadesDocumento1 páginaCuadro Sinóptico - ActividadesJose CatacoraAún no hay calificaciones
- Proyecto Integral de Secretariado AuxiliarDocumento13 páginasProyecto Integral de Secretariado AuxiliarNicole Hernandez De Valerio100% (2)
- Capitulo 2 TransformadoresDocumento48 páginasCapitulo 2 TransformadoreseliezerlarardzAún no hay calificaciones
- Aviso 242621Documento3 páginasAviso 242621El LitoralAún no hay calificaciones
- Gobierno Ramiro de León CarpioDocumento7 páginasGobierno Ramiro de León CarpioOrlandoAún no hay calificaciones
- Módulo Ii - Parte 1Documento34 páginasMódulo Ii - Parte 1Juanita Otero MoranAún no hay calificaciones
- Actividad 2 Informe Caracterización Del Derecho PositivoDocumento7 páginasActividad 2 Informe Caracterización Del Derecho PositivoCamilixie Diaz CatariAún no hay calificaciones