También podría gustarte
- Aprender a programar con Excel VBA con 100 ejercicios prácticoDe EverandAprender a programar con Excel VBA con 100 ejercicios prácticoCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Construction Extension To The PMBOK® P M I (2016) 1.1 ESPDocumento166 páginasConstruction Extension To The PMBOK® P M I (2016) 1.1 ESPJuanCa PC0% (1)
- Practica 4 - Modelado y Simulacion 2019 - 20Documento18 páginasPractica 4 - Modelado y Simulacion 2019 - 20Jairo RamírezAún no hay calificaciones
- Informe 2-Simulink PDFDocumento31 páginasInforme 2-Simulink PDFEdgar Paolo Renteria Liendo100% (1)
- Introducción Al SimulinkDocumento28 páginasIntroducción Al SimulinkSarah JenkinsAún no hay calificaciones
- Módulo de cinemática DMU de Catia V5De EverandMódulo de cinemática DMU de Catia V5Calificación: 5 de 5 estrellas5/5 (1)
- UF0864 - Resolución de averías lógicas en equipos microinformáticosDe EverandUF0864 - Resolución de averías lógicas en equipos microinformáticosAún no hay calificaciones
- Introducción A SimulinkDocumento16 páginasIntroducción A SimulinkItzel RMAún no hay calificaciones
- Intro Ducci On Sim U LinkDocumento14 páginasIntro Ducci On Sim U LinkCHUKAROAún no hay calificaciones
- Practica 6Documento14 páginasPractica 6Arturo RomeroAún no hay calificaciones
- P0 - SimulinkDocumento13 páginasP0 - SimulinkBryan SalvadorAún no hay calificaciones
- 6CV12 Galicia Santillan Alexis Eduardo Práctica3Documento20 páginas6CV12 Galicia Santillan Alexis Eduardo Práctica3fer bolañosAún no hay calificaciones
- P2 Simulación de Sistemas ContinuosDocumento15 páginasP2 Simulación de Sistemas ContinuosBryan SalvadorAún no hay calificaciones
- SimulinkDocumento9 páginasSimulinkBrahian CamiloAún no hay calificaciones
- Simulink Manual PDFDocumento33 páginasSimulink Manual PDFMoises Bautista CastroAún no hay calificaciones
- Practicas MultisimDocumento18 páginasPracticas Multisimweltonvs100% (1)
- Aplicaciones de Simulink Al Control AutomaticoDocumento72 páginasAplicaciones de Simulink Al Control Automaticomasb29009Aún no hay calificaciones
- SimulinkDocumento24 páginasSimulinkdarcysoriaAún no hay calificaciones
- Apuntes Sobre SimulinkDocumento68 páginasApuntes Sobre SimulinkGaston VilchesAún no hay calificaciones
- Practica 3Documento9 páginasPractica 3vianey martinezAún no hay calificaciones
- Bloque 2 Practica 1Documento13 páginasBloque 2 Practica 1jantonio_martinezmasAún no hay calificaciones
- Practica 06 SIMULINKDocumento10 páginasPractica 06 SIMULINKJean Carlos QvisPeAún no hay calificaciones
- SimulinkDocumento50 páginasSimulinkIsmael Fco100% (1)
- Practica 3 SimulinkDocumento51 páginasPractica 3 SimulinkGeovanny PesantezAún no hay calificaciones
- Evidencia de AprendizajeDocumento18 páginasEvidencia de AprendizajejantomoralesAún no hay calificaciones
- LABORATORIO Teoria de Control Automatico 02 - Experiencia 4Documento18 páginasLABORATORIO Teoria de Control Automatico 02 - Experiencia 4Jhoel René Mamani HuancaAún no hay calificaciones
- Fluidsim Guion Practicas NeumaticaDocumento57 páginasFluidsim Guion Practicas NeumaticaAnonymous hdnD4u8HAún no hay calificaciones
- Fluidsim Guion Practicas NeumaticaDocumento57 páginasFluidsim Guion Practicas NeumaticaJosé Luis Casarrubios UcedaAún no hay calificaciones
- Fluidsim Guion Practicas NeumaticaDocumento57 páginasFluidsim Guion Practicas NeumaticaSherma007Aún no hay calificaciones
- PRÁCTICA No 2Documento12 páginasPRÁCTICA No 2Edgar ZapanaAún no hay calificaciones
- Prac 3 Introducción Al SimulinkDocumento7 páginasPrac 3 Introducción Al SimulinkGabs CarrizalesAún no hay calificaciones
- Practica 7 - LCA1-MlbDocumento14 páginasPractica 7 - LCA1-MlbMarcus FigueroaAún no hay calificaciones
- SCILABDocumento15 páginasSCILABJimmy Cervantes LivonAún no hay calificaciones
- L1b Simulink Control DigitalDocumento12 páginasL1b Simulink Control DigitalDiego Fernando Ramirez MuñozAún no hay calificaciones
- 6CV12 Calderon Garcia Raul Corte No1 Practica No 3introduccion A SIMULINK 19-03-2021 PDFDocumento16 páginas6CV12 Calderon Garcia Raul Corte No1 Practica No 3introduccion A SIMULINK 19-03-2021 PDFfer bolañosAún no hay calificaciones
- SimulinkDocumento4 páginasSimulinkAlex Aguirre ParedesAún no hay calificaciones
- Reporte SimulinkDocumento8 páginasReporte SimulinkJorge ArizagaAún no hay calificaciones
- SIMULINKDocumento15 páginasSIMULINKMario Felix MartinezAún no hay calificaciones
- Practica Nro 2Documento11 páginasPractica Nro 2fernandoAún no hay calificaciones
- Modelamiento y Simulacion Mediante SimulinkDocumento8 páginasModelamiento y Simulacion Mediante SimulinkwilliamAún no hay calificaciones
- Practica No 1 Integrador Realimentacion y ControlDocumento12 páginasPractica No 1 Integrador Realimentacion y ControlFaustoVinicioAcuñaCoelloAún no hay calificaciones
- Micro SimDocumento40 páginasMicro SimorlandorgrAún no hay calificaciones
- Automatizacion-Practica1 CorregidaDocumento21 páginasAutomatizacion-Practica1 CorregidaanakraziAún no hay calificaciones
- PspiceDocumento40 páginasPspicegiancarlos1979Aún no hay calificaciones
- SIMULINKDocumento21 páginasSIMULINKDaniel IturraldeAún no hay calificaciones
- SCO101 - G0 - Sistemas de Control Automatico Con Simulink C1 - 2022 BIS2Documento9 páginasSCO101 - G0 - Sistemas de Control Automatico Con Simulink C1 - 2022 BIS2noelAún no hay calificaciones
- Experiencia 4. Introduccion A SIMULINKDocumento14 páginasExperiencia 4. Introduccion A SIMULINKJose VizarretaAún no hay calificaciones
- Itc 2023 Taller 6Documento4 páginasItc 2023 Taller 6Emily SaavedraAún no hay calificaciones
- Simulink MétodosDocumento26 páginasSimulink Métodosana lucia manchego chavezAún no hay calificaciones
- Control ClasicoDocumento13 páginasControl ClasicoFrancisco A. GarciaAún no hay calificaciones
- Programacion GraficaDocumento23 páginasProgramacion GraficaSebastian Fiallos MartinezAún no hay calificaciones
- Mat LabsDocumento8 páginasMat Labsdavidlucas200Aún no hay calificaciones
- Ejemplos SimulinkDocumento99 páginasEjemplos SimulinkMax SantiagoAún no hay calificaciones
- Simulacion de Sistemas Dinamicos Con SimulinkDocumento40 páginasSimulacion de Sistemas Dinamicos Con Simulinkmanu79_7Aún no hay calificaciones
- Guía de uso en Matlab en el desarrollo de modelos de volatilidadDe EverandGuía de uso en Matlab en el desarrollo de modelos de volatilidadAún no hay calificaciones
- Compilador C CCS y Simulador Proteus para Microcontroladores PICDe EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICCalificación: 2.5 de 5 estrellas2.5/5 (5)
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Aún no hay calificaciones
- Tratamiento básico de datos y hojas de cálculo. ADGG0508De EverandTratamiento básico de datos y hojas de cálculo. ADGG0508Aún no hay calificaciones
- Procesadores de textos y presentaciones de información básicos. ADGG0508De EverandProcesadores de textos y presentaciones de información básicos. ADGG0508Aún no hay calificaciones
- Caso PEGASO ERPDocumento18 páginasCaso PEGASO ERPLuis Perez LeyvaAún no hay calificaciones
- Ds Zoneflex r300 Es PDFDocumento4 páginasDs Zoneflex r300 Es PDFElias TobonAún no hay calificaciones
- Estadisticas e Indicadores de Telecomunicaciones Argentina 2008 - 2012-OK PDFDocumento76 páginasEstadisticas e Indicadores de Telecomunicaciones Argentina 2008 - 2012-OK PDFFederico YouAún no hay calificaciones
- Sig en El TransporteDocumento11 páginasSig en El TransportecaacruzpeAún no hay calificaciones
- Diseño Estructural de Cimentaciones - IB - Grupo 5Documento36 páginasDiseño Estructural de Cimentaciones - IB - Grupo 5Esteban SánchezAún no hay calificaciones
- Caso El Club PDFDocumento16 páginasCaso El Club PDFYamy VitaleAún no hay calificaciones
- Yesid Zapata - Hoja de VidaDocumento2 páginasYesid Zapata - Hoja de VidaSeekAún no hay calificaciones
- Uso de Herramientas Digitales para Los NegociosDocumento12 páginasUso de Herramientas Digitales para Los NegociosNayelly VasquezAún no hay calificaciones
- Jeep Liberty 3.7L 1252 1336.en - EsDocumento85 páginasJeep Liberty 3.7L 1252 1336.en - EsJonatan Merlo100% (1)
- Actividad 1 T2 Modelos de RedesDocumento8 páginasActividad 1 T2 Modelos de RedesBrandon Gomez GuzmanAún no hay calificaciones
- Guia Configuracion ProliantDocumento35 páginasGuia Configuracion ProliantAna Maria Ordoñez PatiñoAún no hay calificaciones
- Conceptos Básicos de InnovaciónDocumento7 páginasConceptos Básicos de Innovaciónjunior olmedo quijano cárdenasAún no hay calificaciones
- Fecha y HoraDocumento46 páginasFecha y HoraJose CastilloAún no hay calificaciones
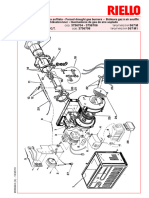
- Despiece Quemador FS8Documento2 páginasDespiece Quemador FS8DarioPazosAún no hay calificaciones
- TAREA 3.9 - Hidraulica AplicadaDocumento20 páginasTAREA 3.9 - Hidraulica AplicadaCarlos Daniel C.R.Aún no hay calificaciones
- Proyecto Canaleta Parshall Rev BDocumento45 páginasProyecto Canaleta Parshall Rev BAlvaroll Javier Valderramones ZentenoAún no hay calificaciones
- Guia de Funcionamiento de Dice (Profesores)Documento46 páginasGuia de Funcionamiento de Dice (Profesores)DYANA EDITH ALVAREZ ENRÍQUEZAún no hay calificaciones
- P2P MOOC'sDocumento4 páginasP2P MOOC'sJuanCarlosPayeAún no hay calificaciones
- Programa Feria Peru Con Ciencia Eureka 29 Nov 20-1 PDFDocumento32 páginasPrograma Feria Peru Con Ciencia Eureka 29 Nov 20-1 PDFMORALES FERRER CRISTIAN EMILIOAún no hay calificaciones
- Entregable 1 de Instalaciones EléctricasDocumento9 páginasEntregable 1 de Instalaciones EléctricasFabian Gonza Yangua100% (1)
- Unidad de Aprendizaje III BimestreiDocumento15 páginasUnidad de Aprendizaje III BimestreiRosa L. Condori CrispinAún no hay calificaciones
- Contabilidad - Ejemplo de Modelo Del Ciclo Contable - Empresa La Muñecona 2022Documento61 páginasContabilidad - Ejemplo de Modelo Del Ciclo Contable - Empresa La Muñecona 2022FulanitoAún no hay calificaciones
- Edgardo Javier Morillo Revelo, Modelo PACIE InvestigaciónDocumento6 páginasEdgardo Javier Morillo Revelo, Modelo PACIE InvestigaciónJavier120427Aún no hay calificaciones
- Barrera Joel HPE101 9624 2023Documento2 páginasBarrera Joel HPE101 9624 2023joel barreraAún no hay calificaciones
- Desarrollo de Una Base de Datos en Postgresql PortableDocumento28 páginasDesarrollo de Una Base de Datos en Postgresql PortableLeonardo CóndorAún no hay calificaciones
- Categoría de ContactoresDocumento4 páginasCategoría de ContactoresWilson PalomoAún no hay calificaciones
- Asesores 2018 UPGDocumento1 páginaAsesores 2018 UPGDr. Alfredo MalpartidaAún no hay calificaciones
- Procesadores Superescalares (I) - Microarquitecturas y Principios de Funcionamiento - Cap3 - GrupobDocumento143 páginasProcesadores Superescalares (I) - Microarquitecturas y Principios de Funcionamiento - Cap3 - GrupobwbejarAún no hay calificaciones
- Perez - de Sirvientas y Eléctricos ServidoresDocumento12 páginasPerez - de Sirvientas y Eléctricos Servidoreszarandanga0% (1)