También podría gustarte
- Construyendo La Máquina ExpendedoraDocumento9 páginasConstruyendo La Máquina ExpendedoraJuan A Agudelo B100% (1)
- Maquina Escopladora (Autoguardado)Documento6 páginasMaquina Escopladora (Autoguardado)erosennin79100% (1)
- Material Acabados Sesion 1Documento88 páginasMaterial Acabados Sesion 1EDDY MEDINA REFULIO100% (1)
- CarpinteriaDocumento13 páginasCarpinteriaChristian Alexander Diaz100% (2)
- Cómo Hacer Un Marco de MaderaDocumento2 páginasCómo Hacer Un Marco de MaderaPABLONOL100% (1)
- Como Hacer Construir Un BoteDocumento7 páginasComo Hacer Construir Un BoteMaikol Guevara100% (3)
- Fabricación de FunboxDocumento6 páginasFabricación de FunboxJorge Romero Rodriguez100% (1)
- Aplicaciones Industriales - Motores Por Pasos - Step MotorsDocumento11 páginasAplicaciones Industriales - Motores Por Pasos - Step MotorsJaime Leonardo Cruz100% (1)
- Carretilla ElevadoraDocumento17 páginasCarretilla ElevadoraIrca CA100% (1)
- Lego y RobotDocumento137 páginasLego y Robotmariofsm100% (1)
- Casa Construida Con Paneles BAJO Azcapotzalco PDFDocumento51 páginasCasa Construida Con Paneles BAJO Azcapotzalco PDFFhernando77100% (1)
- AISLACINDocumento52 páginasAISLACINVivian Muñoz Roa100% (1)
- Siding FibrocementoDocumento6 páginasSiding FibrocementoPablo Aravena100% (2)
- CIELOSDocumento25 páginasCIELOSVivian Muñoz Roa100% (1)
- Proyecto de Taller Banco de TrabajoDocumento9 páginasProyecto de Taller Banco de TrabajoLuis LaraAún no hay calificaciones
- 03 15955 Foll Web Muebleria Unir Tableros Arar 23 Sep 15 1451Documento6 páginas03 15955 Foll Web Muebleria Unir Tableros Arar 23 Sep 15 1451rom100% (1)
- Cómo Hacer Un Plato LongworthDocumento11 páginasCómo Hacer Un Plato LongworthPierre799es100% (3)
- Dobladora de MetalesDocumento22 páginasDobladora de Metaleswalterrc7779151100% (1)
- Encuadernacion Casera PDFDocumento9 páginasEncuadernacion Casera PDFgubem100% (1)
- Carro de SoldarDocumento9 páginasCarro de SoldarPeter Harry Halire Yucra100% (1)
- Hebel Placa Termoaislante PDFDocumento4 páginasHebel Placa Termoaislante PDFaccediendo100% (1)
- Catálogo de Herramientas StanleyDocumento60 páginasCatálogo de Herramientas StanleyGilberto Pérez100% (1)
- Como Unir Tableros Con Tornillos Autorroscante FolletoDocumento6 páginasComo Unir Tableros Con Tornillos Autorroscante FolletoCristian Villella Rojas100% (1)
- Instrucciones Son para Construir Una Pared de 60 CMDocumento10 páginasInstrucciones Son para Construir Una Pared de 60 CMYoss100% (1)
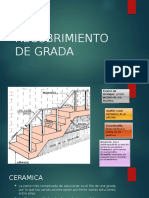
- Recubrimiento de GradaDocumento31 páginasRecubrimiento de GradaJoshe Pesantez100% (1)
- Como Hacer Un Banco Con Sierra CircularDocumento16 páginasComo Hacer Un Banco Con Sierra CircularMario Graniel Ortega100% (2)
- Celulosa BiocontruccionDocumento18 páginasCelulosa Biocontrucciongyromero1986100% (1)
- Como Fabricar Una Mesa SencillaDocumento8 páginasComo Fabricar Una Mesa Sencilladaf2008100% (1)
- Curriculo JavaScriptDocumento6 páginasCurriculo JavaScriptLuis Fernando Hernandez Narvaez100% (1)
- Instalación de TejasDocumento7 páginasInstalación de Tejastecnoscar1972100% (1)
- Tecnicas VogueDocumento2 páginasTecnicas VogueDavid No ParaAún no hay calificaciones
- Como Hacer Una Sierra Circular de BancoDocumento14 páginasComo Hacer Una Sierra Circular de BancoMiguel Garcia Espinosa100% (1)
- Como Construir Una Guillotina P - Artes Del LibroDocumento17 páginasComo Construir Una Guillotina P - Artes Del Librobruno100% (1)
- Puente LevadizoDocumento21 páginasPuente LevadizoSimón Ríos100% (1)
- Guía Ensamble Programacion RRVDocumento111 páginasGuía Ensamble Programacion RRVRamiro Robles V.100% (1)
- MamposteriaDocumento13 páginasMamposteriaangitasangama100% (1)
- Cap v. Bancas de Pallets.Documento9 páginasCap v. Bancas de Pallets.Alejandra Aspillaga100% (1)
- Como Hacer Un PERFORADOR para PapelDocumento3 páginasComo Hacer Un PERFORADOR para PapelDaniele Besana100% (1)
- Dobladora de PlanchaDocumento4 páginasDobladora de Planchadguzmanmendoza100% (1)
- VolcometalDocumento31 páginasVolcometalFelipe Ramírez100% (1)
- Catapulta RomanaDocumento7 páginasCatapulta RomanaAlfonso Marchena100% (1)
- Construccion de Soldador ElectricoDocumento7 páginasConstruccion de Soldador ElectricoJuan Damazo Estrada Jimenez100% (1)
- Muebles de Pallets Como ConstruirlosDocumento4 páginasMuebles de Pallets Como ConstruirlosAlejandra Aspillaga100% (1)
- Unir Tableros Con Tornillos Autoperforables PDFDocumento3 páginasUnir Tableros Con Tornillos Autoperforables PDFJuan Devoto100% (1)
- Análisis Respecto A La Fashion WeekDocumento73 páginasAnálisis Respecto A La Fashion WeekNoelia Sauza Loayza100% (1)
- La Construcción de Un Cortador de Alambre Caliente de EspumaDocumento5 páginasLa Construcción de Un Cortador de Alambre Caliente de Espumagalanrojo100% (1)
- Tejados de Cobre - CEDICDocumento73 páginasTejados de Cobre - CEDIChmvhmv100% (1)
- Como Hacer Un Taladro Casero Taladro Mecanico o ManualDocumento3 páginasComo Hacer Un Taladro Casero Taladro Mecanico o ManualInversionesRdj100% (1)
- Soldador de Arco CaseroDocumento8 páginasSoldador de Arco Caseroclaudiodaniel19100% (1)
- TECHOSDocumento56 páginasTECHOSVivian Muñoz Roa100% (1)
- CO DO 05 Como Hacer Un Camarote Flotante de MaderaDocumento9 páginasCO DO 05 Como Hacer Un Camarote Flotante de MaderaAlvaro100% (1)
- Humedades en SótanoDocumento8 páginasHumedades en SótanoJavier García de Paz100% (1)
- 2.1.1 PPT - Tipos de PresupuestosDocumento13 páginas2.1.1 PPT - Tipos de PresupuestosBrendaLabinHernandez100% (1)
- Robot Seguidor de LineasDocumento12 páginasRobot Seguidor de Lineasmart47Aún no hay calificaciones
- Cómo Hacer Un Trineo de GUIA DE SIERRADocumento9 páginasCómo Hacer Un Trineo de GUIA DE SIERRAjpintomwh100% (1)
- Construya Su Propio Auto Radio Control AdoDocumento81 páginasConstruya Su Propio Auto Radio Control Adors19483% (12)
- Inyectora de PlasticoDocumento17 páginasInyectora de PlasticoWalter Victorio Valle100% (1)
- Generador de Corriente InfinitaDocumento10 páginasGenerador de Corriente InfinitaRaulOrtizAún no hay calificaciones
- Manual Práctico Sobre Construcción de Una BobinadoraDocumento17 páginasManual Práctico Sobre Construcción de Una BobinadoraJuan Lujan Salas100% (2)
- Resumen de VideosDocumento2 páginasResumen de Videosjesus ernesto illa carpioAún no hay calificaciones
- Personajes de FeriaDocumento2 páginasPersonajes de FeriaCarlos Leon MercadoAún no hay calificaciones
- B Infografia Familiar Uso Cocina-mejorada-leña-SelvaDocumento1 páginaB Infografia Familiar Uso Cocina-mejorada-leña-SelvaCarlos Leon MercadoAún no hay calificaciones
- CINESTYLEDocumento4 páginasCINESTYLECarlos Leon MercadoAún no hay calificaciones
- Cuál Es La Esencia de Una MarcaDocumento12 páginasCuál Es La Esencia de Una MarcaCarlos Leon MercadoAún no hay calificaciones
- Folleto Educativo Características, Uso y Mantenimiento de La UBS - Tipo Arrastre Hidráulico PDFDocumento8 páginasFolleto Educativo Características, Uso y Mantenimiento de La UBS - Tipo Arrastre Hidráulico PDFCarlos Leon MercadoAún no hay calificaciones
- Himno Del Colegio Iepm Rafael Hoyos RubioDocumento1 páginaHimno Del Colegio Iepm Rafael Hoyos RubioCarlos Leon MercadoAún no hay calificaciones
- Diseño Grafico Datos y Apuntes PDFDocumento88 páginasDiseño Grafico Datos y Apuntes PDFCarlos Leon Mercado100% (1)
- Centros Turisticos de BambamarcaDocumento29 páginasCentros Turisticos de BambamarcaCarlos Leon Mercado100% (2)
- Resumen Organizacion de EventoslDocumento12 páginasResumen Organizacion de EventoslCarlos Leon MercadoAún no hay calificaciones
- Manual de Organización para EventosDocumento42 páginasManual de Organización para EventosCarlos Leon MercadoAún no hay calificaciones
- Batalla de San PabloDocumento4 páginasBatalla de San PabloCarlos Leon Mercado100% (1)
- Artesania Cuyumalca Alfombras y TapicesDocumento11 páginasArtesania Cuyumalca Alfombras y TapicesCarlos Leon MercadoAún no hay calificaciones
- Flujo de Visitas La Solucion A Los Quiebres de StockDocumento18 páginasFlujo de Visitas La Solucion A Los Quiebres de StockCarlos Leon MercadoAún no hay calificaciones
- Armar Toldos Decoracion Con TelasDocumento3 páginasArmar Toldos Decoracion Con TelasCarlos Leon MercadoAún no hay calificaciones
- Articulo PorconDocumento4 páginasArticulo PorconCarlos Leon MercadoAún no hay calificaciones
- L4 El AutotransformadorDocumento11 páginasL4 El AutotransformadorRony Genaro Quispe CoricazaAún no hay calificaciones
- Capitulo 220 NECDocumento30 páginasCapitulo 220 NECAlli Va100% (2)
- Taller Introducción Leyes BásicasDocumento2 páginasTaller Introducción Leyes BásicasRichard Hernan Reyes JaraAún no hay calificaciones
- Control de Velocidad para Motores MonofásicosDocumento3 páginasControl de Velocidad para Motores MonofásicosGregorio JarrinAún no hay calificaciones
- Laboratorio 2Documento33 páginasLaboratorio 2Ari CordovaAún no hay calificaciones
- Preguntas Cuestionario ElectricidadDocumento4 páginasPreguntas Cuestionario Electricidadmarcelacorrea86% (57)
- Cable de Guarda y ConductorDocumento1 páginaCable de Guarda y ConductorDIEGO CARLO VERA DELGADOAún no hay calificaciones
- 140-218 en EsDocumento79 páginas140-218 en EsErick Alexander Silva ReyesAún no hay calificaciones
- Pre Informe Virtual Juan P. Toro y Simón D. CortésDocumento6 páginasPre Informe Virtual Juan P. Toro y Simón D. CortésSimón CortésAún no hay calificaciones
- Implementacion de Un Sistema Fotovoltaico para Suministrar Energia Electrica A La Vivienda e Iluminacion Del Terreno Agricola de La Empresa Nova Solar Aqp S.A.CDocumento122 páginasImplementacion de Un Sistema Fotovoltaico para Suministrar Energia Electrica A La Vivienda e Iluminacion Del Terreno Agricola de La Empresa Nova Solar Aqp S.A.Cwilfredo aliaga100% (1)
- Electrostatica y Corrientes ElectricasDocumento39 páginasElectrostatica y Corrientes ElectricasAndrea VCAún no hay calificaciones
- Alarma Con Retardo de Entrada y SalidaDocumento6 páginasAlarma Con Retardo de Entrada y SalidaMarcelo RojasAún no hay calificaciones
- AesDocumento2 páginasAesJacob SantosAún no hay calificaciones
- Fasciculo 2 - Electronica IIDocumento15 páginasFasciculo 2 - Electronica IIErixon MatosAún no hay calificaciones
- Practicas Con Arduin1Documento58 páginasPracticas Con Arduin1Ramón GarcíaAún no hay calificaciones
- El Alternador AutoDocumento23 páginasEl Alternador AutoNelson ChoquehuancaAún no hay calificaciones
- 06 Subestaciones y Sistemas de TransferenciaDocumento44 páginas06 Subestaciones y Sistemas de TransferenciaRicardo MoralesAún no hay calificaciones
- Informe Fuente ElectronicaDocumento10 páginasInforme Fuente ElectronicaalexAún no hay calificaciones
- Practica 2 (Informe)Documento11 páginasPractica 2 (Informe)JuanAldairRiveraDueñasAún no hay calificaciones
- Reglamento Baja TensiónDocumento375 páginasReglamento Baja TensiónPablo SánchezAún no hay calificaciones
- Ep ML202 Abcdef 2021-1Documento5 páginasEp ML202 Abcdef 2021-1Elian Esteban Chuquillanqui HuamanAún no hay calificaciones
- Eb Ingesco CatalogoDocumento7 páginasEb Ingesco CatalogoMarco Parada DemiquelAún no hay calificaciones
- Lab 4 Paralelo de CE IIDocumento6 páginasLab 4 Paralelo de CE IILUIS CEAún no hay calificaciones
- Informe Sobre Practico de Fuente de Alimentacion en LAB 1Documento5 páginasInforme Sobre Practico de Fuente de Alimentacion en LAB 1Jhendi41Aún no hay calificaciones
- Informe Final 3Documento5 páginasInforme Final 3Darwin Dario Uscacchi ValenciaAún no hay calificaciones
- Campo MagnéticoDocumento5 páginasCampo MagnéticoZahira CadenaAún no hay calificaciones
- Ord A ElectricaDocumento7 páginasOrd A Electricamila PPAún no hay calificaciones
- Modelos IEEDocumento9 páginasModelos IEEMarx ZeroAún no hay calificaciones
- Logica Mixta PDFDocumento5 páginasLogica Mixta PDFanon_170968622Aún no hay calificaciones