También podría gustarte
- VectoresDocumento10 páginasVectoresdieselrulAún no hay calificaciones
- Guía de estudio vectores UTNDocumento24 páginasGuía de estudio vectores UTNDaiana GomezAún no hay calificaciones
- Cuestionario Vectores Terminado (1-25)Documento13 páginasCuestionario Vectores Terminado (1-25)Pablo BotteroAún no hay calificaciones
- Física_Clase6_03.26Documento8 páginasFísica_Clase6_03.26Alejandra AyalaAún no hay calificaciones
- Objetivo 1 - 3 - 3Documento10 páginasObjetivo 1 - 3 - 3Hector AyalaAún no hay calificaciones
- Objetivo 1 - 3 - 3Documento10 páginasObjetivo 1 - 3 - 3Hector Ayala100% (1)
- Introducción a los vectoresDocumento20 páginasIntroducción a los vectoresLuis Alejandro MedinaAún no hay calificaciones
- Introducción A Los Vectores 5° (Semana 4)Documento26 páginasIntroducción A Los Vectores 5° (Semana 4)Misael NakayoAún no hay calificaciones
- 4 Vectores Producto Escalar y VectorialDocumento61 páginas4 Vectores Producto Escalar y VectorialAle Ssandro UnTal SonrisitasAún no hay calificaciones
- GUÍA N°1 VECTORESDocumento13 páginasGUÍA N°1 VECTORESsoyotaku2023Aún no hay calificaciones
- Vector EsDocumento29 páginasVector EsAdela RosalesAún no hay calificaciones
- VECTORESDocumento8 páginasVECTORESjosedomingo05412100% (20)
- Geometria AnaliticaDocumento73 páginasGeometria AnaliticaAdo BlonsterAún no hay calificaciones
- Analisis Vectorial 2Documento89 páginasAnalisis Vectorial 2FIMpeluchinAún no hay calificaciones
- Magnitudes físicas escalares y vectorialesDocumento4 páginasMagnitudes físicas escalares y vectorialesNagely CabreraAún no hay calificaciones
- Vectores y componentes en estaticaDocumento12 páginasVectores y componentes en estaticaJordy Fabian Arreola OvandoAún no hay calificaciones
- Vectores en el plano: magnitud, dirección y sentidoDocumento13 páginasVectores en el plano: magnitud, dirección y sentidoJose TorresAún no hay calificaciones
- 3 Física Diferenciado 2017 VectoresDocumento13 páginas3 Física Diferenciado 2017 VectoresChristian Alejandro ReinosoAún no hay calificaciones
- Magnitudes Físicas Vectoriales para Segundo Grado de SecundariaDocumento4 páginasMagnitudes Físicas Vectoriales para Segundo Grado de Secundariavictor medinaAún no hay calificaciones
- Definición de Un Vector en R2, R3 (Interpretación Geométrica) y Su Generalización en RNDocumento10 páginasDefinición de Un Vector en R2, R3 (Interpretación Geométrica) y Su Generalización en RNJuan Mcfly Badillo80% (5)
- Matematicas Iii: 1 VectoresDocumento30 páginasMatematicas Iii: 1 VectoresJosé Luis Avila CabreraAún no hay calificaciones
- Material de Apoyo Unidad 1 (Parte 2)Documento5 páginasMaterial de Apoyo Unidad 1 (Parte 2)Marina MolinaAún no hay calificaciones
- Guia VectoresDocumento13 páginasGuia VectoresrepasomateAún no hay calificaciones
- Conceptos vectoriales y operaciones básicasDocumento27 páginasConceptos vectoriales y operaciones básicasJimena ScarichAún no hay calificaciones
- VectorDocumento9 páginasVectorRicardo BascuñanAún no hay calificaciones
- VECTORESDocumento20 páginasVECTORESDebora GarciaAún no hay calificaciones
- SESION Análisis Vectorial PDFDocumento6 páginasSESION Análisis Vectorial PDFHaydee TiconaAún no hay calificaciones
- Def. Vectores Clases Prod. Escalar y VectorialDocumento12 páginasDef. Vectores Clases Prod. Escalar y VectorialmanuehespinozaAún no hay calificaciones
- Tarea Calculo de Vectores EguamancDocumento16 páginasTarea Calculo de Vectores EguamancEVELIN PAOLA GUAMAN CALUGUILLINAún no hay calificaciones
- AL 2019 Unidad 2 Vectores y Geometria LinealDocumento15 páginasAL 2019 Unidad 2 Vectores y Geometria LinealDavid AluAún no hay calificaciones
- 3era Clase - Escalares y VectoresDocumento16 páginas3era Clase - Escalares y VectoresJoaquin AlarconAún no hay calificaciones
- Evaluación n1 Anderson Trejo 0302Documento11 páginasEvaluación n1 Anderson Trejo 0302anderson trejoAún no hay calificaciones
- VECTORES. Representación Gráfica.Documento25 páginasVECTORES. Representación Gráfica.AlanysAún no hay calificaciones
- Cálculo Vectorial - Urbano Viñuela & Octavio Puche (Universidad Politecnica de Madrid PDFDocumento81 páginasCálculo Vectorial - Urbano Viñuela & Octavio Puche (Universidad Politecnica de Madrid PDFCruz Nar DavidAún no hay calificaciones
- Guia Vectores........Documento38 páginasGuia Vectores........Beike RichellAún no hay calificaciones
- TEMA 10 Vectores en El EspacioDocumento15 páginasTEMA 10 Vectores en El EspacioclaudiamoragacruzAún no hay calificaciones
- VectoresDocumento23 páginasVectoresPatty Vasquez100% (1)
- Calculo VectorialDocumento20 páginasCalculo VectorialUiichitho ZhamudhioAún no hay calificaciones
- VectoresDocumento7 páginasVectoresMercedes RoblesAún no hay calificaciones
- Unidad 2 Magnitudes Fisicas y CinematicaDocumento27 páginasUnidad 2 Magnitudes Fisicas y CinematicaGABRIELAAún no hay calificaciones
- Geometría VectorialDocumento57 páginasGeometría VectoriallolitoAún no hay calificaciones
- Vectores en Rn y sus OperacionesDocumento10 páginasVectores en Rn y sus OperacionesLuis Alberto Cauich CauichAún no hay calificaciones
- F - 3°año - S4 - Análisis Vectorial IDocumento5 páginasF - 3°año - S4 - Análisis Vectorial IEdilberto Campos SalazarAún no hay calificaciones
- Vectores Fisica IDocumento12 páginasVectores Fisica IjqapaqAún no hay calificaciones
- Analisis VectorialDocumento27 páginasAnalisis VectorialJosias Sangama RiosAún no hay calificaciones
- VectoresDocumento20 páginasVectoresNestor Huamani BarriosAún no hay calificaciones
- Analisis Vectorial 2013Documento19 páginasAnalisis Vectorial 2013Jackelinh Cahuana CondoriAún no hay calificaciones
- MosqVectoresacr PDFDocumento11 páginasMosqVectoresacr PDFEmanuel Mendez DuranAún no hay calificaciones
- Análisis Vectorial I - Marco Teórico Sobre Magnitudes FísicasDocumento2 páginasAnálisis Vectorial I - Marco Teórico Sobre Magnitudes Físicasarturocoronel100Aún no hay calificaciones
- VectoresDocumento14 páginasVectoresapi-380294424Aún no hay calificaciones
- Apremuni FÍSICADocumento41 páginasApremuni FÍSICAToninhoAún no hay calificaciones
- Vector EsDocumento58 páginasVector EsBrian LandaAún no hay calificaciones
- Investigación U1Documento16 páginasInvestigación U1Zury MartinezAún no hay calificaciones
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- M - Guía #5 SiderurgiaDocumento1 páginaM - Guía #5 SiderurgiaBoca JuniorsAún no hay calificaciones
- Guía Nº2 Estructuras y MetalografíaDocumento15 páginasGuía Nº2 Estructuras y MetalografíaBoca JuniorsAún no hay calificaciones
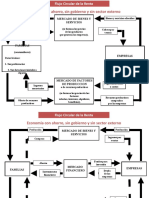
- Flujo Circular de La EconomíaDocumento4 páginasFlujo Circular de La EconomíaDamián VicoAún no hay calificaciones
- Integrales de Línea - 2Documento7 páginasIntegrales de Línea - 2Boca JuniorsAún no hay calificaciones
- Guía #2 Metalografia - Estr.Documento9 páginasGuía #2 Metalografia - Estr.Boca JuniorsAún no hay calificaciones
- Sistemas Tridimensionales de CoordenadasDocumento4 páginasSistemas Tridimensionales de CoordenadasBoca JuniorsAún no hay calificaciones
- 01-Precios, Impuestos y SubsidiosDocumento18 páginas01-Precios, Impuestos y SubsidiosBoca JuniorsAún no hay calificaciones
- Coordenadas Cilíndricas y EsfericasDocumento13 páginasCoordenadas Cilíndricas y EsfericasBoca JuniorsAún no hay calificaciones
- Análisis de funciones racionales y trascendentes mediante derivadas e integrales indefinidasDocumento2 páginasAnálisis de funciones racionales y trascendentes mediante derivadas e integrales indefinidasBoca JuniorsAún no hay calificaciones
- Cónicas 2019Documento17 páginasCónicas 2019Boca JuniorsAún no hay calificaciones
- Sistemas de Ecuaciones 2019Documento9 páginasSistemas de Ecuaciones 2019Boca JuniorsAún no hay calificaciones
- Matrices 2019Documento16 páginasMatrices 2019Boca JuniorsAún no hay calificaciones
- Determinantes 2019Documento11 páginasDeterminantes 2019Boca JuniorsAún no hay calificaciones
- Tutorial WolframAlphaDocumento29 páginasTutorial WolframAlphaJaciel Fielder JimenezAún no hay calificaciones
- Universidad Tecnica de Manabi AlgebraaaDocumento15 páginasUniversidad Tecnica de Manabi AlgebraaaKevin GanchozoAún no hay calificaciones
- B2 Algebra Lineal Ciclo 2Documento9 páginasB2 Algebra Lineal Ciclo 2Maribel GuerraAún no hay calificaciones
- Practica 2Documento25 páginasPractica 2Carlos Mauricio PèrezAún no hay calificaciones
- Matlab 2015 TecsupDocumento101 páginasMatlab 2015 TecsupJuan Roberto Choquehuayta Guillen0% (1)
- Teorema de Hahn-Banach PDFDocumento12 páginasTeorema de Hahn-Banach PDFArmando ValleAún no hay calificaciones
- Vectores en física: tipos, operaciones y representaciónDocumento12 páginasVectores en física: tipos, operaciones y representaciónThebioscityAún no hay calificaciones
- Taller Espacio VectorialDocumento2 páginasTaller Espacio VectorialLady ManriqueAún no hay calificaciones
- Cap I-RECTAS PLANOS Y SUPERFICIES EN R3Documento1145 páginasCap I-RECTAS PLANOS Y SUPERFICIES EN R3Wilson Contreras DelgadoAún no hay calificaciones
- Espacio Vectorial PDFDocumento12 páginasEspacio Vectorial PDFKEVIN MEJIA100% (1)
- TESIS UNCP - MatematicaDocumento75 páginasTESIS UNCP - MatematicaRober Pires VR100% (1)
- Ec-2s - Lcampoverde-Al-F01Documento9 páginasEc-2s - Lcampoverde-Al-F01Luis CampoverdeAún no hay calificaciones
- Álgebra lineal: Parcial 1 de la asignaturaDocumento1 páginaÁlgebra lineal: Parcial 1 de la asignaturaSantiago Rua AlvarezAún no hay calificaciones
- Aligeoi t10Documento42 páginasAligeoi t10Gabriel PalomaresAún no hay calificaciones
- Álgebra Lineal PDFDocumento286 páginasÁlgebra Lineal PDFSergio Miguel Polanco Santos100% (1)
- Introducción A La Investigación de Operaciones, 9na Edición - Frederick S. Hillier & Gerald J. Lieberman - APENDICEDocumento56 páginasIntroducción A La Investigación de Operaciones, 9na Edición - Frederick S. Hillier & Gerald J. Lieberman - APENDICELuis Angel Espinoza Ramos100% (2)
- Analisis Vectorial BDocumento23 páginasAnalisis Vectorial BmwueaqpAún no hay calificaciones
- Silabo ALgebra-lineal-ABET 2023-2Documento2 páginasSilabo ALgebra-lineal-ABET 2023-2mikel.morales.cAún no hay calificaciones
- Pensum Co..Documento65 páginasPensum Co..Juan Zamora100% (1)
- VectoresDocumento198 páginasVectoresWilber BlyAún no hay calificaciones
- Tarea6 U4 - Ensayo Eigenvalores y EigenvectoresDocumento7 páginasTarea6 U4 - Ensayo Eigenvalores y EigenvectoresdiegoAún no hay calificaciones
- Apuntes de Ecuaciones Diferenciales - Ricardo FaroDocumento860 páginasApuntes de Ecuaciones Diferenciales - Ricardo FaroGuillermo Delgado CastilloAún no hay calificaciones
- Aplicaciones Algebra LinealDocumento101 páginasAplicaciones Algebra LinealAnthony AyalaAún no hay calificaciones
- Plan Cátedra Análisis Matemático IIDocumento15 páginasPlan Cátedra Análisis Matemático IIingenauta7282Aún no hay calificaciones
- Cálculo Numérico Apuntes 2020Documento109 páginasCálculo Numérico Apuntes 2020Juan Francisco GiordanoAún no hay calificaciones
- Algebra Lineal - 2020-2Documento11 páginasAlgebra Lineal - 2020-2kevin romeroAún no hay calificaciones
- Combinaciones lineales y espacios vectorialesDocumento20 páginasCombinaciones lineales y espacios vectorialesWiill JuradoAún no hay calificaciones
- 2 Algebra Lineal INGENIERIAS PDFDocumento10 páginas2 Algebra Lineal INGENIERIAS PDFmanuelperdomotAún no hay calificaciones
- AlgebraLineal Unidad 3 Grupo 27Documento14 páginasAlgebraLineal Unidad 3 Grupo 27sandramilenaardilaAún no hay calificaciones
- Analisis Funcional Computacion Cuantica 1Documento47 páginasAnalisis Funcional Computacion Cuantica 1BRAYAN ALEJANDRO MARQUEZ CHUMACEROAún no hay calificaciones