También podría gustarte
- NEURONAVEGACIONDocumento8 páginasNEURONAVEGACIONBrenda Yohana Benitez Cristiano0% (1)
- Suturas MecánicasDocumento15 páginasSuturas MecánicasBrenda Yohana Benitez Cristiano0% (1)
- Cardioagudos Tema50 1v11Documento9 páginasCardioagudos Tema50 1v11Brenda Yohana Benitez CristianoAún no hay calificaciones
- Cierre Percutaneo de La Comunicación InterventricularDocumento40 páginasCierre Percutaneo de La Comunicación InterventricularBrenda Yohana Benitez CristianoAún no hay calificaciones
- Sogamoso VeredalDocumento1 páginaSogamoso VeredalBrenda Yohana Benitez Cristiano100% (1)
- Revista Iberoamericana de Tecnología Postcosecha 1665-0204: IssnDocumento6 páginasRevista Iberoamericana de Tecnología Postcosecha 1665-0204: IssnBrenda Yohana Benitez CristianoAún no hay calificaciones
- PRIMEROS AUXILIOS Tablilla Encuesta Miller Montealegre.Documento22 páginasPRIMEROS AUXILIOS Tablilla Encuesta Miller Montealegre.Andres GutierrezAún no hay calificaciones
- JeringaDocumento2 páginasJeringaManuel gomezAún no hay calificaciones
- PRO Ceso Del Cuidado de Enfermeria A Una Puerpera Inmediata AdolescenteDocumento61 páginasPRO Ceso Del Cuidado de Enfermeria A Una Puerpera Inmediata Adolescentegizsell86% (7)
- Tiempos Fundamentales de La Tecnica Quirurgica SlidesDocumento50 páginasTiempos Fundamentales de La Tecnica Quirurgica SlidesArianna ZambranaAún no hay calificaciones
- Cómo Es El Desarrollo Del Feto en Cada Mes Del EmbarazoDocumento4 páginasCómo Es El Desarrollo Del Feto en Cada Mes Del EmbarazoBriyid VelascoAún no hay calificaciones
- Pae MateDocumento6 páginasPae MateLeonel ValenciaAún no hay calificaciones
- Anomalias CongenitassDocumento23 páginasAnomalias Congenitassmarlon tecotlAún no hay calificaciones
- Ácido Úrico Herramienta de Tamizaje para Preeclampsia. Una Revisión Sistemática de La LiteraturaDocumento37 páginasÁcido Úrico Herramienta de Tamizaje para Preeclampsia. Una Revisión Sistemática de La LiteraturaLissette MartinezAún no hay calificaciones
- Corregida Hoja de Enfermería LuiDocumento5 páginasCorregida Hoja de Enfermería LuiCëecy DiazAún no hay calificaciones
- Presentación PediatriaDocumento47 páginasPresentación PediatriaERICK JHOVANI GUADALUPE GARCIA HERNANDEZAún no hay calificaciones
- Cuidados Del Recien NacidoDocumento25 páginasCuidados Del Recien NacidoJuretzy Rojas100% (1)
- ResultadoGeneral SimulacroFinal RM2020Documento66 páginasResultadoGeneral SimulacroFinal RM2020Julio Perez MercadoAún no hay calificaciones
- Caso Clínico 1 H.E.CDocumento21 páginasCaso Clínico 1 H.E.CAnthonyAún no hay calificaciones
- AbortoDocumento6 páginasAbortoDavid GarcíaAún no hay calificaciones
- Delimitacion de Area Limpia y Area SuciaDocumento6 páginasDelimitacion de Area Limpia y Area SuciaChristian A. Pino M Virla75% (4)
- Expo. Sfa Yfo Dr. Elvis 25Documento27 páginasExpo. Sfa Yfo Dr. Elvis 25Benito CameloAún no hay calificaciones
- EscabiosisDocumento17 páginasEscabiosisMaría Priscila ChacónAún no hay calificaciones
- Formato Declaración de Accidentes Y-O Solicitud de Atención SCTR Sanitas PeruDocumento2 páginasFormato Declaración de Accidentes Y-O Solicitud de Atención SCTR Sanitas PeruGeraldine Luz Aguilar Alanya86% (7)
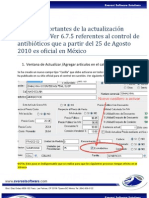
- Emaksimus 675 Control de CosDocumento7 páginasEmaksimus 675 Control de Coslibelulina254Aún no hay calificaciones
- Casos Clinicos Hemorragia Obstetrica PospartoDocumento3 páginasCasos Clinicos Hemorragia Obstetrica PospartoYatziry Velazquez Vil ChisAún no hay calificaciones
- Organizacion FuncionesDocumento36 páginasOrganizacion FuncionesFRANCISCO YOVANI CAL POPAún no hay calificaciones
- CV Dra Eliana 2022 Abril 22Documento6 páginasCV Dra Eliana 2022 Abril 22Eliana ZelayaAún no hay calificaciones
- Triptico UplaDocumento2 páginasTriptico Uplajackriden100% (1)
- Cistocele y RectoceleDocumento37 páginasCistocele y RectoceleRosy Juárez MéndezAún no hay calificaciones
- Analisis Integral Del Movimiento Hospitalario. I Semestre 2016Documento18 páginasAnalisis Integral Del Movimiento Hospitalario. I Semestre 2016Eulis MorilloAún no hay calificaciones
- Padrón Gestantes BellavistaDocumento166 páginasPadrón Gestantes BellavistaUnidad De Psicologia - Bienestar UniversitarioAún no hay calificaciones
- Equipos 2021Documento42 páginasEquipos 2021Laura Catherin Cruz GonzalezAún no hay calificaciones
- Exposicion Octubre Laparatomia ExploratoriaDocumento35 páginasExposicion Octubre Laparatomia ExploratorialenyjhoanabazangargateAún no hay calificaciones
- Rutadetratamiento2013 140604193747 Phpapp02Documento65 páginasRutadetratamiento2013 140604193747 Phpapp02Priscila GuzmánAún no hay calificaciones
- Técnica Quirúrgica. EmiDocumento23 páginasTécnica Quirúrgica. EmiEmily MoraAún no hay calificaciones