También podría gustarte
- Laboratorio 1 CinemaicaDocumento9 páginasLaboratorio 1 CinemaicaRocisneRocisneAún no hay calificaciones
- Barra de Sección CónicaDocumento20 páginasBarra de Sección CónicaBoris PumisachoAún no hay calificaciones
- Semana 03Documento3 páginasSemana 03roy ramos bautistaAún no hay calificaciones
- Tarea DosDocumento3 páginasTarea DosHaward Chalén AspiazuAún no hay calificaciones
- Analisis de Frecuencia Natural en Un Perfil W EmpotradaDocumento9 páginasAnalisis de Frecuencia Natural en Un Perfil W EmpotradaMichael AriasAún no hay calificaciones
- Mecanismos: Biela-Manivela-CorrederaDocumento3 páginasMecanismos: Biela-Manivela-CorrederaOdinAguilarAún no hay calificaciones
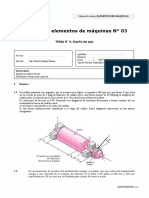
- Ejemplo de Diseño de Un Eje - TECSUPDocumento16 páginasEjemplo de Diseño de Un Eje - TECSUPRubén Darío Chávez GonzálezAún no hay calificaciones
- Taller Mecanismos - Análisis de PosiciónDocumento2 páginasTaller Mecanismos - Análisis de PosiciónMaykhert Pérez SibajaAún no hay calificaciones
- Diseño IDocumento6 páginasDiseño IFabricio Gonzales MalcaAún no hay calificaciones
- CLASE 5 - ResortesDocumento7 páginasCLASE 5 - ResortesMarcos SanabriaAún no hay calificaciones
- PRACTICA No 2 ARTAS SAM PDFDocumento12 páginasPRACTICA No 2 ARTAS SAM PDFJames EchAún no hay calificaciones
- Dinámica Del Cuerpo Rígido IDocumento115 páginasDinámica Del Cuerpo Rígido IJesus Chancatuma Huamán100% (1)
- Calculo Par TorsionalDocumento1 páginaCalculo Par TorsionalJonathan Duchi OleasAún no hay calificaciones
- Laboratorio - Desprendimiento de La Capa Limite en Perfiles AerodinámicosDocumento5 páginasLaboratorio - Desprendimiento de La Capa Limite en Perfiles AerodinámicosAlex Medina ZabalagaAún no hay calificaciones
- Formato IEEE para InvestigacionDocumento3 páginasFormato IEEE para InvestigacionOlivert Honorio ApazaAún no hay calificaciones
- Ejercicio 4Documento4 páginasEjercicio 4Martin Hasskel100% (1)
- Diseño mecánico: Análisis de llaves, vigas y cangurínDocumento5 páginasDiseño mecánico: Análisis de llaves, vigas y cangurínChristian CevallosAún no hay calificaciones
- Tarea 1 PDFDocumento1 páginaTarea 1 PDFandresAún no hay calificaciones
- Practica 6 Instrumentacion Basica ESPOLDocumento5 páginasPractica 6 Instrumentacion Basica ESPOLPsycosiado DivertidoAún no hay calificaciones
- Fuerzas DinamicasDocumento2 páginasFuerzas Dinamicaskleberson_2011Aún no hay calificaciones
- 1 - 5 DiseñoDocumento5 páginas1 - 5 DiseñoAshly QS100% (1)
- Tarea #1. Fatiga de Materiales. Grupo N°1Documento11 páginasTarea #1. Fatiga de Materiales. Grupo N°1Alexander AbregoAún no hay calificaciones
- Análisis de Materiales para Construcción de Un EjeDocumento2 páginasAnálisis de Materiales para Construcción de Un EjeHidekel Linares de LugoAún no hay calificaciones
- Nuevo Documento de Microsoft WordDocumento5 páginasNuevo Documento de Microsoft WordLeonardo Marin AlccaccahuaAún no hay calificaciones
- Estudio de Caso MecanismosDocumento60 páginasEstudio de Caso MecanismosErik Blanco0% (1)
- Respuesta de Un Sistema A Entrada SinusoidalDocumento9 páginasRespuesta de Un Sistema A Entrada SinusoidalsamgstormAún no hay calificaciones
- Informe N°4 Lab Electrotecnia Joaquin Vilches ReyesDocumento18 páginasInforme N°4 Lab Electrotecnia Joaquin Vilches ReyesMaria de los AngelesAún no hay calificaciones
- Tarea 3Documento1 páginaTarea 3Alex AtencioAún no hay calificaciones
- Evaluación Diseño Elementos MáquinasDocumento6 páginasEvaluación Diseño Elementos MáquinasAndresAún no hay calificaciones
- Hoja de Calculo para Engranajes ConicosDocumento16 páginasHoja de Calculo para Engranajes ConicosMijhail RomeroAún no hay calificaciones
- Uniones No PermanentesDocumento10 páginasUniones No PermanentesAnonymous t0x9w00g1Aún no hay calificaciones
- Ejercicios Propuestos para Transferencia de CalorDocumento12 páginasEjercicios Propuestos para Transferencia de CalorDavid PachacamaAún no hay calificaciones
- Tornillo Sin Fin - Corona (2° Corte 20%)Documento22 páginasTornillo Sin Fin - Corona (2° Corte 20%)Jesus Alejandro Velandia MarquinaAún no hay calificaciones
- Guía de Laboratorio No6 Flexión de Una BarraDocumento7 páginasGuía de Laboratorio No6 Flexión de Una BarraOmar LopezAún no hay calificaciones
- 02 Diseño de Engranajes HelicoidalesDocumento10 páginas02 Diseño de Engranajes HelicoidalesJhon FernandezAún no hay calificaciones
- Extensometría eléctrica-flexiónDocumento8 páginasExtensometría eléctrica-flexiónJeyder GeorgeAún no hay calificaciones
- Cinemática de Cuerpos RígidosDocumento10 páginasCinemática de Cuerpos RígidosSandra MaldonadoAún no hay calificaciones
- EngranesDocumento64 páginasEngranesjose fernando chavez villanuevaAún no hay calificaciones
- Informe Juntas Soldadas JVGDocumento23 páginasInforme Juntas Soldadas JVGJorge VGAún no hay calificaciones
- VENTILADORES Y COMPRESORES (Cherkaski Capitulo 8 Al 11) Grupo GDocumento58 páginasVENTILADORES Y COMPRESORES (Cherkaski Capitulo 8 Al 11) Grupo GEduard GiancarlommAún no hay calificaciones
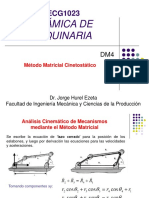
- Clase DM4Documento32 páginasClase DM4ByronAún no hay calificaciones
- $TX3 Multimetro TektronixDocumento68 páginas$TX3 Multimetro TektronixJuly As0% (1)
- DiseñoDocumento3 páginasDiseñofes cuautiAún no hay calificaciones
- Fuerza y Potencia de CorteDocumento7 páginasFuerza y Potencia de CorteMaria JoseAún no hay calificaciones
- Tarea Sistemas de Control e InstrumentaciónDocumento5 páginasTarea Sistemas de Control e InstrumentaciónHelen CárdenasAún no hay calificaciones
- Guía de BandasDocumento12 páginasGuía de Bandaslord_helix_hell666Aún no hay calificaciones
- Tornillo de PotenciaDocumento10 páginasTornillo de Potenciaoscar felixAún no hay calificaciones
- Cálculo de Turbina FrancisDocumento10 páginasCálculo de Turbina FrancisDanny Huaman OrueAún no hay calificaciones
- Laboratorio 1.termofluidos Segunda ParcialDocumento7 páginasLaboratorio 1.termofluidos Segunda ParcialNANCY LIZETTE CAMPOS CEJA100% (1)
- Resortes y cojinetes fórmulasDocumento5 páginasResortes y cojinetes fórmulasMijhael FernandezAún no hay calificaciones
- Práctica de CincelDocumento8 páginasPráctica de CincelRobert SmithAún no hay calificaciones
- Diseño de eslabonamientos para generar movimientosDocumento14 páginasDiseño de eslabonamientos para generar movimientosstalinAún no hay calificaciones
- Practica Tunel de VientoDocumento9 páginasPractica Tunel de VientoAlfredo Toriz100% (1)
- Cojinetesdesuperficieplana PDFDocumento17 páginasCojinetesdesuperficieplana PDFJorge LuisAún no hay calificaciones
- Tarea Diagrama de Fases y Tratamientos TérmicosDocumento3 páginasTarea Diagrama de Fases y Tratamientos TérmicosMelanie Medina SantamaríaAún no hay calificaciones
- Teoria de Criterio de Fallas Por Carga EstaticaDocumento17 páginasTeoria de Criterio de Fallas Por Carga EstaticaJairoAún no hay calificaciones
- Solución de Dinámica PytelDocumento48 páginasSolución de Dinámica PytelMaximo De La Cruz Damian33% (6)
- Teoria T. P. 8.1 TRABAJO Y ENERGÍADocumento8 páginasTeoria T. P. 8.1 TRABAJO Y ENERGÍAJuan AgüeraAún no hay calificaciones
- Rueda de MaxwellDocumento12 páginasRueda de MaxwellVictor Barahona MartinezAún no hay calificaciones
- VCDS Printable Manual 2015.en - EsDocumento76 páginasVCDS Printable Manual 2015.en - Esmarcoscheca3Aún no hay calificaciones
- Cruze2010 ATDocumento1 páginaCruze2010 ATJonatan MarquezAún no hay calificaciones
- Colorado2008 SensoresoxigenoDocumento1 páginaColorado2008 SensoresoxigenoJonatan MarquezAún no hay calificaciones
- Cruze2010 IMTDocumento1 páginaCruze2010 IMTJonatan MarquezAún no hay calificaciones
- Programador de MicrocontroladorDocumento1 páginaProgramador de MicrocontroladorJonatan MarquezAún no hay calificaciones
- Tecnico ElectronicaDocumento1 páginaTecnico ElectronicaJonatan MarquezAún no hay calificaciones
- Reporte ObservacionesDocumento7 páginasReporte ObservacionesJonatan MarquezAún no hay calificaciones
- Ensamble Electrónico de PrototiposDocumento1 páginaEnsamble Electrónico de PrototiposJonatan MarquezAún no hay calificaciones
- Cruze2010 INYECTORESDocumento1 páginaCruze2010 INYECTORESJonatan MarquezAún no hay calificaciones
- Me T1 KCDocumento31 páginasMe T1 KCJonatan MarquezAún no hay calificaciones
- TERMODINAMICA-NOTAS Extendido-2014 PDFDocumento129 páginasTERMODINAMICA-NOTAS Extendido-2014 PDFJulio Verne NieblaAún no hay calificaciones
- 258 Técnicas de Indentificación Algebraicas y Espectrales de Señales ArmónicasDocumento230 páginas258 Técnicas de Indentificación Algebraicas y Espectrales de Señales ArmónicasJonatan MarquezAún no hay calificaciones
- Cruze2010 EVAPDocumento1 páginaCruze2010 EVAPJonatan MarquezAún no hay calificaciones
- Problema 9 MeDocumento1 páginaProblema 9 MeJonatan MarquezAún no hay calificaciones
- Tesis Arturo MasterDocumento115 páginasTesis Arturo MasterSeminario InvestigaciónAún no hay calificaciones
- Mecanizado de Alta VelocidadDocumento72 páginasMecanizado de Alta Velocidadcatio000100% (1)
- Multiplexado de DatosDocumento18 páginasMultiplexado de DatosJonatan MarquezAún no hay calificaciones
- Emulador OBD-II Arduino CAN-BUSDocumento13 páginasEmulador OBD-II Arduino CAN-BUSJonatan Marquez100% (1)
- Sistema SBWDocumento20 páginasSistema SBWJonatan MarquezAún no hay calificaciones
- NOM167. Conector de Diagnóstico Tipo A (SAE J1962 Equivalente ISO)Documento80 páginasNOM167. Conector de Diagnóstico Tipo A (SAE J1962 Equivalente ISO)Jonatan MarquezAún no hay calificaciones
- Perfilegresado AutomotrizDocumento1 páginaPerfilegresado AutomotrizJonatan MarquezAún no hay calificaciones
- Diagnóstico en Redes de ComunicaciónDocumento21 páginasDiagnóstico en Redes de ComunicaciónJonatan MarquezAún no hay calificaciones
- Ficha CKP No. 01Documento1 páginaFicha CKP No. 01Argenis MarinAún no hay calificaciones
- Luces ActivasDocumento59 páginasLuces ActivasJonatan MarquezAún no hay calificaciones
- Como Llegar A Ser Un Líder ExcepcionalDocumento19 páginasComo Llegar A Ser Un Líder ExcepcionaltereshutressytaAún no hay calificaciones
- Evolución de los cambios automáticos desde sus inicios hasta la actualidadDocumento96 páginasEvolución de los cambios automáticos desde sus inicios hasta la actualidadMauricio Pacaje Aramayo100% (1)
- Redes de Comunicación AutomotrizDocumento17 páginasRedes de Comunicación AutomotrizJonatan MarquezAún no hay calificaciones
- Obd IiDocumento26 páginasObd IiJonatan MarquezAún no hay calificaciones
- Sistema de Dirección EléctricaDocumento25 páginasSistema de Dirección EléctricaJonatan MarquezAún no hay calificaciones
- Como Llegar A Ser Un Líder ExcepcionalDocumento19 páginasComo Llegar A Ser Un Líder ExcepcionaltereshutressytaAún no hay calificaciones
- Robo Con Fuerza en Las CosasDocumento5 páginasRobo Con Fuerza en Las CosasNacho Soriano PerisAún no hay calificaciones
- Criterios de La Defensoría Del ConsumidorDocumento196 páginasCriterios de La Defensoría Del ConsumidorSofía HidalgoAún no hay calificaciones
- 1MC KDocumento3 páginas1MC KKevin ArnoldAún no hay calificaciones
- Las Regencias y El Problema Carlista (1833-1843)Documento7 páginasLas Regencias y El Problema Carlista (1833-1843)felixprofedesocialesAún no hay calificaciones
- Decreto 1076 de 2015 - NormaDocumento594 páginasDecreto 1076 de 2015 - NormaalejandravcAún no hay calificaciones
- Columna Dante Pinto - Tema Legislación AmbientalDocumento1 páginaColumna Dante Pinto - Tema Legislación AmbientalDante Manuel Pinto OtazúAún no hay calificaciones
- 20 Modelo de Medida Cautelar de AmparoDocumento21 páginas20 Modelo de Medida Cautelar de AmparodianaAún no hay calificaciones
- Fideicomiso - LisoprawskiDocumento21 páginasFideicomiso - LisoprawskiLucila DebesaAún no hay calificaciones
- Madres de Plaza de Mayo: la historia de Gustavo PasikDocumento18 páginasMadres de Plaza de Mayo: la historia de Gustavo PasikIvo FNAún no hay calificaciones
- Pasaporte Primera Vez Mayor de EdadDocumento6 páginasPasaporte Primera Vez Mayor de EdaddobleuyoAún no hay calificaciones
- La Tesis de La Demarcación Fuerte VSDocumento3 páginasLa Tesis de La Demarcación Fuerte VSHéctorAún no hay calificaciones
- Constitucionales Y Motivaciones PersonalesDocumento20 páginasConstitucionales Y Motivaciones PersonalesJOSEPH IRVING PINEDA ARISTAAún no hay calificaciones
- General Juan Perón - Los Vendepatria PDFDocumento240 páginasGeneral Juan Perón - Los Vendepatria PDFRamon Mario De DonatisAún no hay calificaciones
- Guía - Módulo - 1 - Psicologia Legal y ForenseDocumento3 páginasGuía - Módulo - 1 - Psicologia Legal y ForenseTamara LzgAún no hay calificaciones
- Escrito LidiaDocumento4 páginasEscrito LidiaLuis Apaza CubaAún no hay calificaciones
- Justificación Del Imperativo CategóricoDocumento9 páginasJustificación Del Imperativo CategóricoMiguel Angel Armas GómezAún no hay calificaciones
- Contrato Compra VentaDocumento2 páginasContrato Compra VentaIsidro Orozco AlvarezAún no hay calificaciones
- Tesis Haber Absoluto Relativo 2018Documento3 páginasTesis Haber Absoluto Relativo 2018Diana Vanessa RamosAún no hay calificaciones
- Informacion Minjus Reing - 2Documento14 páginasInformacion Minjus Reing - 2Jessica WallaceAún no hay calificaciones
- Nu Ah E1 KJV1Documento2 páginasNu Ah E1 KJV1Juan CorralesAún no hay calificaciones
- TDR SERVICIO DE Difucion de Spot RADIAL Gus FNDocumento2 páginasTDR SERVICIO DE Difucion de Spot RADIAL Gus FNMeylu MQAún no hay calificaciones
- Católico y masónDocumento97 páginasCatólico y masónDavid Gerardo GalvanAún no hay calificaciones
- La justificación por la feDocumento9 páginasLa justificación por la feAngélica SepúlvedaAún no hay calificaciones
- Benjamin Constant: "De La Libertad de Los Antiguos Comparada Con La de Los Modernos"Documento2 páginasBenjamin Constant: "De La Libertad de Los Antiguos Comparada Con La de Los Modernos"Juan Manuel La Rosa100% (2)
- MoqueguanazoDocumento3 páginasMoqueguanazolizpfAún no hay calificaciones
- S3 - Los Sindicatos en La República DominicanaDocumento3 páginasS3 - Los Sindicatos en La República DominicanaFLOR INES MERCEDES PEGUEROAún no hay calificaciones
- Desmaterialización de Los Títulos de Crédito 2Documento12 páginasDesmaterialización de Los Títulos de Crédito 2Nicole DuarteAún no hay calificaciones
- Análisis de guía de carga Hapag-Lloyd para envío de jabón desde GuatemalaDocumento3 páginasAnálisis de guía de carga Hapag-Lloyd para envío de jabón desde GuatemalaRene RosalesAún no hay calificaciones
- Cine Foro 2Documento3 páginasCine Foro 2AMANDA BAQUEROAún no hay calificaciones
- Ultimo Decreto de EmergenciaDocumento136 páginasUltimo Decreto de EmergenciaCivil EkantAún no hay calificaciones