También podría gustarte
- Economía matemática. Segunda ediciónDe EverandEconomía matemática. Segunda ediciónCalificación: 5 de 5 estrellas5/5 (1)
- Metodos NumericosDocumento6 páginasMetodos NumericosJOSE CARLOS CONCHA TEJADA100% (1)
- Diagrama Momento-Curvatura para sección de hormigón armadoDocumento4 páginasDiagrama Momento-Curvatura para sección de hormigón armadoAndrés RiquelmeAún no hay calificaciones
- Trabajo 04Documento10 páginasTrabajo 04KETHNY JUSTINO MALPARTIDA PINOAún no hay calificaciones
- Ejemplo de Respuesta DinámicaDocumento10 páginasEjemplo de Respuesta DinámicaRUBEN FLORES FLORESAún no hay calificaciones
- Trabajodomiciliario Nro 02 Metodos Numericos MavDocumento13 páginasTrabajodomiciliario Nro 02 Metodos Numericos MavMarvin Fito Aquino Villegas100% (1)
- Solución Del Examen Mecanica de Medios Continuos UNI PDFDocumento7 páginasSolución Del Examen Mecanica de Medios Continuos UNI PDFJhury León SosaAún no hay calificaciones
- Trabajo 03Documento13 páginasTrabajo 03KETHNY JUSTINO MALPARTIDA PINOAún no hay calificaciones
- 4p PDFDocumento2 páginas4p PDFJesus HilarioAún no hay calificaciones
- Fundamentos Matematicos Del Metodo de Los Elementos Finitos - U. CartagenaDocumento40 páginasFundamentos Matematicos Del Metodo de Los Elementos Finitos - U. CartagenaRoly_RootsAún no hay calificaciones
- Contrato de Residente de ObraDocumento7 páginasContrato de Residente de Obraromeroanyosa27Aún no hay calificaciones
- Diagrama Momento CurvaturaDocumento5 páginasDiagrama Momento Curvaturaalain carataAún no hay calificaciones
- Modelos Histereticos TeoricosDocumento14 páginasModelos Histereticos TeoricosAshily Aguilar GonzalesAún no hay calificaciones
- Examen Parcial MMC 2021-2Documento2 páginasExamen Parcial MMC 2021-2Betsy Silvia100% (2)
- Examen Parcial 2017-I PDFDocumento2 páginasExamen Parcial 2017-I PDFLexAún no hay calificaciones
- WilburDocumento6 páginasWilburJunior FlooAún no hay calificaciones
- Matemática Avanzada para Ingenieros PUCPDocumento6 páginasMatemática Avanzada para Ingenieros PUCPedgarAún no hay calificaciones
- Evaluación de Fallas en Muros de Albañilería Confinada en Los Colegios Del Distrito de Salitral Provincia de Morropón, Departamento PiuraDocumento81 páginasEvaluación de Fallas en Muros de Albañilería Confinada en Los Colegios Del Distrito de Salitral Provincia de Morropón, Departamento PiuramgdarioAún no hay calificaciones
- Cap 5 Torsión (A) Versión 2018Documento23 páginasCap 5 Torsión (A) Versión 2018Benjamin Adauto IllanesAún no hay calificaciones
- Diagrama Momento-Curvatura de Secciones de Concreto Armado PDFDocumento32 páginasDiagrama Momento-Curvatura de Secciones de Concreto Armado PDFAlexander MoralesAún no hay calificaciones
- P 04Documento4 páginasP 04Betsy Silvia100% (1)
- Examen SUSTITUTORIO - EC832-J - 2020-IIDocumento3 páginasExamen SUSTITUTORIO - EC832-J - 2020-IICesar Figueroa GuillerguaAún no hay calificaciones
- Análisis de riesgo sísmico con CRISIS2007Documento15 páginasAnálisis de riesgo sísmico con CRISIS2007Zens Irving Huamani Rodriguez100% (1)
- Clase 01 - SimétrikaDocumento32 páginasClase 01 - SimétrikaRubén A. Flores RojasAún no hay calificaciones
- U3-5 Análisis Sísmico Modal Espectral Seudo TridimensionalDocumento40 páginasU3-5 Análisis Sísmico Modal Espectral Seudo Tridimensionalaldo_pg_022Aún no hay calificaciones
- Métodos numéricos para resolver sistemas de ecuaciones linealesDocumento10 páginasMétodos numéricos para resolver sistemas de ecuaciones linealesLexAún no hay calificaciones
- Catalogo Posgrado Fic Uni 22Documento50 páginasCatalogo Posgrado Fic Uni 22hugomanriqueAún no hay calificaciones
- Examenes FinitosDocumento38 páginasExamenes FinitosJuan Carlos FernandezAún no hay calificaciones
- Zumaeta CMDocumento146 páginasZumaeta CMAnonymous MM24jmAún no hay calificaciones
- Uni Fic Upg - C 801 - 2021 02 - EfDocumento2 páginasUni Fic Upg - C 801 - 2021 02 - EfYuri GzlsAún no hay calificaciones
- PC 4Documento3 páginasPC 4Luigi Dávila Del Aguila0% (1)
- Metodos NumericosDocumento38 páginasMetodos NumericosElvis ZanabriaAún no hay calificaciones
- Parámetros de diseño SLBDocumento1 páginaParámetros de diseño SLBAngel Alonso Marcos GamboaAún no hay calificaciones
- Grupo 3 - Project CharterDocumento4 páginasGrupo 3 - Project CharterAnthony Chumbislla GuerreroAún no hay calificaciones
- Ejercicios de Carga SinusoidalDocumento4 páginasEjercicios de Carga SinusoidalSTEVEN ANTHONY RAMIREZ CARREÑOAún no hay calificaciones
- Control 2 PDFDocumento9 páginasControl 2 PDFGori CHAún no hay calificaciones
- Calculo Cimentacion CercoDocumento2 páginasCalculo Cimentacion CercoMiranda Roque AlanAún no hay calificaciones
- Animales y números 0-9Documento2 páginasAnimales y números 0-9Laura Pino MamaniAún no hay calificaciones
- Trabajo 1er ModuloDocumento2 páginasTrabajo 1er ModuloKarol VivianaAún no hay calificaciones
- Metodologias Vulnerabildad Sismica 2016 OLARTEDocumento60 páginasMetodologias Vulnerabildad Sismica 2016 OLARTEMarden Rengifo RuizAún no hay calificaciones
- Cociente de RayleighDocumento9 páginasCociente de RayleighJunior FlooAún no hay calificaciones
- Trabajo 05Documento14 páginasTrabajo 05KETHNY JUSTINO MALPARTIDA PINOAún no hay calificaciones
- Diseño de Muro de Contencion MC-01 PDFDocumento8 páginasDiseño de Muro de Contencion MC-01 PDFmariochc68Aún no hay calificaciones
- Solución Del Examen Parcial - 2016b PDFDocumento9 páginasSolución Del Examen Parcial - 2016b PDFJoel Pozo RamírezAún no hay calificaciones
- Excel de Linea de InfluenciaDocumento36 páginasExcel de Linea de InfluenciaBryan Yeison Onofre CachicatariAún no hay calificaciones
- Ejercicio de SismoDocumento9 páginasEjercicio de SismoRamós Girón CarlosAún no hay calificaciones
- Detalles Cimentacion Asta Bandera Model 1 PDFDocumento1 páginaDetalles Cimentacion Asta Bandera Model 1 PDFFiliberto Baez MontesAún no hay calificaciones
- Calculo de La Línea de Influencia para El Segundo Tipo de PuenteDocumento77 páginasCalculo de La Línea de Influencia para El Segundo Tipo de PuenteKevvin Francis100% (1)
- Clase 5 Elementos FinitosDocumento63 páginasClase 5 Elementos FinitosJorGe IsRaelAún no hay calificaciones
- Informe Tarea 4Documento20 páginasInforme Tarea 4Guersy VeraAún no hay calificaciones
- Mecanica de Suelos 1-GuiaDocumento159 páginasMecanica de Suelos 1-GuiaKetin VasquezAún no hay calificaciones
- Metrado Portada de Ingreso-TournavistaDocumento5 páginasMetrado Portada de Ingreso-TournavistaLeonidas Gil Arroyo LozanoAún no hay calificaciones
- Catalogo de Sismos en El PerúDocumento1 páginaCatalogo de Sismos en El PerúAngel Daniel Castañeda LazaroAún no hay calificaciones
- Espectros Con NonlinDocumento8 páginasEspectros Con NonlinMluis us.Aún no hay calificaciones
- Taller 01 - EtabsDocumento33 páginasTaller 01 - EtabsPAULAún no hay calificaciones
- Ficha Ingetecho AutoportanteDocumento8 páginasFicha Ingetecho AutoportanteDaisenedAún no hay calificaciones
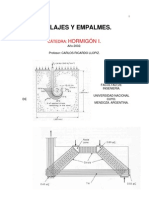
- Anclajes y EmpalmesDocumento26 páginasAnclajes y EmpalmesramilianAún no hay calificaciones
- Matemáticas BásicasDocumento45 páginasMatemáticas BásicasMartín Domínguez DíazAún no hay calificaciones
- Ejercicios Resueltosv 2Documento131 páginasEjercicios Resueltosv 2ElenaAún no hay calificaciones
- Ejer Cici Os Re SueltosDocumento131 páginasEjer Cici Os Re Sueltosjose801451Aún no hay calificaciones
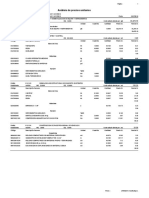
- Analisis de Costos de Partidas PDFDocumento29 páginasAnalisis de Costos de Partidas PDFWalter Waldo Condori ArocutipaAún no hay calificaciones
- Diseño Preliminar 01Documento7 páginasDiseño Preliminar 01Jhon Smit Gonzales UscataAún no hay calificaciones
- Estandares Seguridad Contratistas - Intradevco - 2020Documento18 páginasEstandares Seguridad Contratistas - Intradevco - 2020Jhon Smit Gonzales UscataAún no hay calificaciones
- Rescate en Espacio ConfinadoDocumento49 páginasRescate en Espacio ConfinadoJhon Smit Gonzales UscataAún no hay calificaciones
- Memoria de Cálculo Cirterna 60 M3Documento17 páginasMemoria de Cálculo Cirterna 60 M3Jhon Smit Gonzales UscataAún no hay calificaciones
- 2021-01 MMat I Semana 13 Sesión 39Documento18 páginas2021-01 MMat I Semana 13 Sesión 39Jhon Smit Gonzales UscataAún no hay calificaciones
- Planta Lote 20 MilDocumento10 páginasPlanta Lote 20 MilJhon Smit Gonzales UscataAún no hay calificaciones
- 2021-01 MMat I Semana 13 Sesión 40Documento16 páginas2021-01 MMat I Semana 13 Sesión 40Jhon Smit Gonzales UscataAún no hay calificaciones
- Ficha de Inscripción PUSHOVERDocumento1 páginaFicha de Inscripción PUSHOVERJhon Smit Gonzales UscataAún no hay calificaciones
- PB-VRA-015 Titulación Profesional (Registro y Seguimiento Por INFOSIL) v8 - Junio2021Documento18 páginasPB-VRA-015 Titulación Profesional (Registro y Seguimiento Por INFOSIL) v8 - Junio2021Jhon Smit Gonzales UscataAún no hay calificaciones
- Mecánica de Materiales I: Relaciones entre PropiedadesDocumento17 páginasMecánica de Materiales I: Relaciones entre PropiedadesJhon Smit Gonzales UscataAún no hay calificaciones
- 2021-01 MMat I Semana 11 Sesión 29Documento23 páginas2021-01 MMat I Semana 11 Sesión 29Jhon Smit Gonzales UscataAún no hay calificaciones
- UNI7Documento61 páginasUNI7Jhon Smit Gonzales UscataAún no hay calificaciones
- 2021-01 MMat I Semana 12 Sesión 34Documento19 páginas2021-01 MMat I Semana 12 Sesión 34ALEXANDER DONATO HUAMANI TUEROSAún no hay calificaciones
- Protocol OsDocumento8 páginasProtocol Osvictor enrique100% (1)
- F-260-1 Solicitud de Emisión de Diploma de Grado de Bachiller Mayo2021Documento2 páginasF-260-1 Solicitud de Emisión de Diploma de Grado de Bachiller Mayo2021Jovan Guns GunsAún no hay calificaciones
- Planta Lote 20 MilDocumento10 páginasPlanta Lote 20 MilJhon Smit Gonzales UscataAún no hay calificaciones
- Análisis LinealDocumento46 páginasAnálisis LinealjannerAún no hay calificaciones
- DYN6Documento53 páginasDYN6Jhon Smit Gonzales UscataAún no hay calificaciones
- Análisis de Vigas con STRANDocumento34 páginasAnálisis de Vigas con STRANEdgar Saenz Lizarbe0% (1)
- DYN4Documento25 páginasDYN4Jhon Smit Gonzales UscataAún no hay calificaciones
- TFG GBozzo PDFDocumento69 páginasTFG GBozzo PDFJulio RuizAún no hay calificaciones
- Análisis LinealDocumento46 páginasAnálisis LinealjannerAún no hay calificaciones
- El Concepto Rigido-Flexible-Ductil y Las PDFDocumento20 páginasEl Concepto Rigido-Flexible-Ductil y Las PDFYonny Pacompìa YucraAún no hay calificaciones
- Proceso de Analisis y Diseño Utilizando Disipadores PDFDocumento39 páginasProceso de Analisis y Diseño Utilizando Disipadores PDFelias8260508Aún no hay calificaciones
- Análisis de Vigas con STRANDocumento34 páginasAnálisis de Vigas con STRANEdgar Saenz Lizarbe0% (1)
- Disipadores SLBDocumento39 páginasDisipadores SLBJhon Smit Gonzales UscataAún no hay calificaciones
- Estimacion de Perdidas Sismicas Mediante Curvas deDocumento11 páginasEstimacion de Perdidas Sismicas Mediante Curvas deJhon Smit Gonzales UscataAún no hay calificaciones
- El Concepto Rigido-Flexible-Ductil y Las PDFDocumento20 páginasEl Concepto Rigido-Flexible-Ductil y Las PDFYonny Pacompìa YucraAún no hay calificaciones
- Bitacora CrioDocumento15 páginasBitacora Crioabner betancourtAún no hay calificaciones
- Experiencia N°5 CT 4°Documento6 páginasExperiencia N°5 CT 4°KARIN LUCRECIA HUILLCA MAQQUEREAún no hay calificaciones
- Soneto XIII y XXIII AnalisisDocumento9 páginasSoneto XIII y XXIII AnalisisNahir Alvarez FerreiraAún no hay calificaciones
- Consumo de Sustancias Psicoactivas Hasta Metodologia Primer ParteDocumento19 páginasConsumo de Sustancias Psicoactivas Hasta Metodologia Primer ParteYabelin CampoAún no hay calificaciones
- 7.-Modulo-del-Vector-Resultante-para-Primer-Grado-de-SegundariaDocumento3 páginas7.-Modulo-del-Vector-Resultante-para-Primer-Grado-de-SegundariaJuan RamirezAún no hay calificaciones
- Trabajo de Ingles - PaisDocumento3 páginasTrabajo de Ingles - PaisSantiago VegaAún no hay calificaciones
- Esquemas de Aplicacion - Linea ArquitectonicaDocumento11 páginasEsquemas de Aplicacion - Linea ArquitectonicaWendyAún no hay calificaciones
- Angustia y Liberación de La Palabra en CatuloDocumento17 páginasAngustia y Liberación de La Palabra en CatuloGalu1912Aún no hay calificaciones
- Alternativas de Operación.Documento2 páginasAlternativas de Operación.Paula Andrea GarciaAún no hay calificaciones
- Frascold Semi Her 50 HZ 2013Documento52 páginasFrascold Semi Her 50 HZ 2013jms26985100% (1)
- Guía de Razonamiento Verbal 1Documento4 páginasGuía de Razonamiento Verbal 1Ale JaraAún no hay calificaciones
- El Cordon de SoldaduraDocumento8 páginasEl Cordon de SoldaduraAntonio AntezanaAún no hay calificaciones
- Formato TalleresDocumento4 páginasFormato TalleresVanessa SerranoAún no hay calificaciones
- "Alerta Roja" Reglas Del Juego de MesaDocumento3 páginas"Alerta Roja" Reglas Del Juego de MesaFab FabsAún no hay calificaciones
- Estandares - Minimos PHVADocumento1 páginaEstandares - Minimos PHVACata Bobadilla HenaoAún no hay calificaciones
- Central CCMD V8.0 o superior con nuevas funcionalidadesDocumento10 páginasCentral CCMD V8.0 o superior con nuevas funcionalidadesProcer GearAún no hay calificaciones
- Presentacion Manual Interventoria Obra Publica 2022Documento72 páginasPresentacion Manual Interventoria Obra Publica 2022Lino MartinAún no hay calificaciones
- Curso de Especialización en Automatización Industrial-0Documento3 páginasCurso de Especialización en Automatización Industrial-0Alexander Saravia AndiaAún no hay calificaciones
- Origenes de Los Crateres Lunares Alfred WegenerDocumento21 páginasOrigenes de Los Crateres Lunares Alfred WegenerOscar DourronAún no hay calificaciones
- Subestación Eléctrica: Lectura e Interpretación de EsquemasDocumento20 páginasSubestación Eléctrica: Lectura e Interpretación de EsquemasFernando Kanashiro Dominguez100% (1)
- 2021 s3 Cep - GC Xbarra-RDocumento44 páginas2021 s3 Cep - GC Xbarra-RGonzalo M. CordovaAún no hay calificaciones
- Diseño de Una Minicentral Solar en Las Pampas de Puerto Eten.Documento31 páginasDiseño de Una Minicentral Solar en Las Pampas de Puerto Eten.juanAún no hay calificaciones
- Resumen Terminos No Definidos, Angulos, y Rectas Paralelas y PerpendicularesDocumento10 páginasResumen Terminos No Definidos, Angulos, y Rectas Paralelas y PerpendicularesStephany SerranoAún no hay calificaciones
- Incual Competencias Pcpi FontaneriaDocumento11 páginasIncual Competencias Pcpi FontaneriapaulinoposadaAún no hay calificaciones
- CATALOGO HSM Instalacion y Mantenimiento PDFDocumento12 páginasCATALOGO HSM Instalacion y Mantenimiento PDFFernando NanezAún no hay calificaciones
- Lalg U1 Ea AllgDocumento3 páginasLalg U1 Ea AllgandreslunasaldivarAún no hay calificaciones
- C2 - Tema 5 - P2 - 2023 - Componentes Del Sistema de AcueductoDocumento113 páginasC2 - Tema 5 - P2 - 2023 - Componentes Del Sistema de Acueductonestor lucumi giraldoAún no hay calificaciones
- Cálculo de parámetros eléctricos y dimensionamiento de conductoresDocumento3 páginasCálculo de parámetros eléctricos y dimensionamiento de conductoresLeandro Leao Zeballos100% (1)
- Nc-Seguridad Carga PDFDocumento14 páginasNc-Seguridad Carga PDFRodriguez MarAún no hay calificaciones