También podría gustarte
- Monografia de Clasificación de PresupuestosDocumento22 páginasMonografia de Clasificación de PresupuestosIvan VergarayAún no hay calificaciones
- Diseño de Canales Con Flujo Uniforme.Documento9 páginasDiseño de Canales Con Flujo Uniforme.Dulce Azucena14Aún no hay calificaciones
- Problematica Sistema de BombeoDocumento42 páginasProblematica Sistema de BombeoS̝̮͖͈̟̣͖͘ͅa̼̯͡ṷ͠l̡̬͔̙͝ M̭̼͑ͪe͚̬̦̱z̭̟͈̭ͯͬ̌ͭ͐a̠̭̖̱̪̱͐ͫͥȑ͖̫̞͈̋ͫ̓Aún no hay calificaciones
- Vulnerabilidad SismicaDocumento9 páginasVulnerabilidad SismicaEdison FernandezAún no hay calificaciones
- Informe Recreo Campestre WadoDocumento8 páginasInforme Recreo Campestre WadoKris Karol Mayta BarreraAún no hay calificaciones
- Examen Final-Aspectos Eticos y LegalesDocumento5 páginasExamen Final-Aspectos Eticos y LegalesCristianHerbasPillacaAún no hay calificaciones
- Componentes de un sistema de detección de incendiosDocumento11 páginasComponentes de un sistema de detección de incendiosAlberth Polo ZavaletaAún no hay calificaciones
- Act 03 Trabajo Analisis Estructural Ramos Sanchez Norca.Documento24 páginasAct 03 Trabajo Analisis Estructural Ramos Sanchez Norca.oliver100% (2)
- Diseño hidráulico de rápidas y caídas en canalesDocumento20 páginasDiseño hidráulico de rápidas y caídas en canalesGilber Quispe ChahuaraAún no hay calificaciones
- Investigacion Formativa Ii UnidadDocumento5 páginasInvestigacion Formativa Ii UnidadJean Paul Miñano VelizAún no hay calificaciones
- La Gestión para Los Permisos para La Ejecución y Funcionamientos de Las Plantas de Tratamientos de Las Aguas Residuales en El PerúDocumento18 páginasLa Gestión para Los Permisos para La Ejecución y Funcionamientos de Las Plantas de Tratamientos de Las Aguas Residuales en El PerúefrainAún no hay calificaciones
- Separata para Examen Final Hidrologia UPAODocumento17 páginasSeparata para Examen Final Hidrologia UPAOMichel SageAún no hay calificaciones
- Diseño de Sistema de Agua PotableDocumento31 páginasDiseño de Sistema de Agua Potablewilliam Navarrete MendietaAún no hay calificaciones
- Análisis Estructural II: Trabajo ColaborativoDocumento13 páginasAnálisis Estructural II: Trabajo ColaborativoANDERSON RAMOS SILVAAún no hay calificaciones
- Sistemas de detección de incendios: componentes y tipos de detectoresDocumento15 páginasSistemas de detección de incendios: componentes y tipos de detectoresThu Etelvinitho CondorAún no hay calificaciones
- Acero Estructural en PuentesDocumento50 páginasAcero Estructural en Puenteselver evangelistaAún no hay calificaciones
- Practica Calificada de Segunda Unidad - HidrologíaDocumento3 páginasPractica Calificada de Segunda Unidad - HidrologíaBrayan Yahir Colchado IrcañaupaAún no hay calificaciones
- Colaborativo-Aspectos Eticos y Legales en Ingenieria Civil - I UnidadDocumento9 páginasColaborativo-Aspectos Eticos y Legales en Ingenieria Civil - I UnidadJohn Walter CPAún no hay calificaciones
- Examen de Hidrología IIDocumento4 páginasExamen de Hidrología IILuchani RomeroAún no hay calificaciones
- Estudio de la cuenca Qda. Pucashca AncashDocumento25 páginasEstudio de la cuenca Qda. Pucashca AncashJamesAún no hay calificaciones
- Fuentes de AguaDocumento20 páginasFuentes de AguaJuan Carlos MiñopeAún no hay calificaciones
- Diseño de Un AcueductoDocumento13 páginasDiseño de Un AcueductoLUIGUI TEYLOR TITO ESPINOZAAún no hay calificaciones
- Análisis de estructuras hiperestáticas mediante el método de las fuerzasDocumento14 páginasAnálisis de estructuras hiperestáticas mediante el método de las fuerzasPaola Lucero Guerrero IreneAún no hay calificaciones
- PDF Trabajo de Cuencas Uladech 2016 02 CompressDocumento15 páginasPDF Trabajo de Cuencas Uladech 2016 02 Compressaracely camizan geraldoAún no hay calificaciones
- Efectos de Los Sismos Sobre Las ConstruccionesDocumento10 páginasEfectos de Los Sismos Sobre Las ConstruccionesPaola Flores VidaurreAún no hay calificaciones
- Planeación de proyectos: fases del ciclo de vida y procesos de interacciónDocumento18 páginasPlaneación de proyectos: fases del ciclo de vida y procesos de interacciónDelwin Darwin Q HAún no hay calificaciones
- Tipos de Fallas en ColumnasDocumento6 páginasTipos de Fallas en Columnasaline ferreira da silvaAún no hay calificaciones
- Diseño de losa de puente simplemente apoyada de 5m con HL-93Documento6 páginasDiseño de losa de puente simplemente apoyada de 5m con HL-93Jenifer Olivera rojasAún no hay calificaciones
- Trabajo ColaborativoDocumento29 páginasTrabajo ColaborativoMarcio LaurenteAún no hay calificaciones
- Problemas de Gestion de Proyectos.pDocumento3 páginasProblemas de Gestion de Proyectos.pElizabeth Diana Gomez SantanaAún no hay calificaciones
- Evaluación de Impacto Ambiental Como Instrumento de Gestión AmbientalDocumento10 páginasEvaluación de Impacto Ambiental Como Instrumento de Gestión AmbientalRichar Dominic ManesAún no hay calificaciones
- Monografia de Expo 2 Fluidos FLUJO GRADUALMENTE VARIADODocumento9 páginasMonografia de Expo 2 Fluidos FLUJO GRADUALMENTE VARIADOSánchez MaemAún no hay calificaciones
- Diseño de vigas con flexiónDocumento12 páginasDiseño de vigas con flexiónAnTony Ramirez GutierrezAún no hay calificaciones
- Clasificacion de SuelosDocumento8 páginasClasificacion de SuelosCapricornio TuLucesitaAún no hay calificaciones
- Medición de Flujos por Presión DiferencialDocumento20 páginasMedición de Flujos por Presión DiferencialDon IntercadAún no hay calificaciones
- Practica Junior EnriqueDocumento5 páginasPractica Junior EnriqueEnrique CMAún no hay calificaciones
- Estructuras Sismorresistentes - 1.1Documento70 páginasEstructuras Sismorresistentes - 1.1Anonymous tda9RKsFAún no hay calificaciones
- Cuenca HidrologicaDocumento10 páginasCuenca HidrologicaJhonny Altamirano MonzonAún no hay calificaciones
- BOUSSINESQDocumento29 páginasBOUSSINESQJulianaOréAún no hay calificaciones
- Métodos para Estabilizar TaludesDocumento6 páginasMétodos para Estabilizar TaludesEdinson Aguirre MonteroAún no hay calificaciones
- Tipos de Tuberias para Conduccion de Agua PotableDocumento5 páginasTipos de Tuberias para Conduccion de Agua PotableDiego GomezAún no hay calificaciones
- Mecanica de SuelosDocumento8 páginasMecanica de SuelosNickol Chia CastañedaAún no hay calificaciones
- Valorizaciones y Liquidación de Obra FinalDocumento53 páginasValorizaciones y Liquidación de Obra FinalLESLY THALIA CIEZA NUÑEZAún no hay calificaciones
- GUIA Patología en Albañilería Confinada Severidad de Daño Quispe Pari WilfredoDocumento119 páginasGUIA Patología en Albañilería Confinada Severidad de Daño Quispe Pari WilfredoDelmiMartínAguirreCordovaAún no hay calificaciones
- Tarea Academica 01-1Documento27 páginasTarea Academica 01-1Yadim Carhuachin RiveraAún no hay calificaciones
- Agregados concreto clasificaciónDocumento18 páginasAgregados concreto clasificaciónYeyson Caballero ObregonAún no hay calificaciones
- Diagrama de Interaccion - Problema 01 CONCRETO ARMADODocumento6 páginasDiagrama de Interaccion - Problema 01 CONCRETO ARMADOleonel cañari gonzales100% (1)
- Trabajo de HidrologiaDocumento9 páginasTrabajo de HidrologiaJose Antonio Aliaga AzañaAún no hay calificaciones
- Perfil-Sudjuña Corregido2Documento156 páginasPerfil-Sudjuña Corregido2jose luis pedraza sauñeAún no hay calificaciones
- TURNITINDocumento8 páginasTURNITINManuel Angel Peña BarriosAún no hay calificaciones
- Instalaciones Sanitarias Vivienda UnifamiliarDocumento22 páginasInstalaciones Sanitarias Vivienda UnifamiliarBernardo RodriguezAún no hay calificaciones
- Infografía de EstructurasDocumento10 páginasInfografía de EstructurasMabel AnahyAún no hay calificaciones
- Informe Cuenca HidrográficaDocumento13 páginasInforme Cuenca HidrográficaPierre PhilcoAún no hay calificaciones
- Abastecimiento - Diseño Agua PotableDocumento12 páginasAbastecimiento - Diseño Agua Potablericardo angel martin gómez leónAún no hay calificaciones
- Actividad #05-Cierre de ProyectosDocumento10 páginasActividad #05-Cierre de ProyectosYuri Alex Alvarez TabraAún no hay calificaciones
- UladechDocumento33 páginasUladechEfrainTamaraAún no hay calificaciones
- DESARENADORDocumento5 páginasDESARENADORGustavo YescasAún no hay calificaciones
- Sesion 9 Deflexion de Vigas PDFDocumento25 páginasSesion 9 Deflexion de Vigas PDFtitoAún no hay calificaciones
- Revisiòn de Diptico 1 Del 20 de Abril.Documento13 páginasRevisiòn de Diptico 1 Del 20 de Abril.Shelly StefhanyAún no hay calificaciones
- Anexos Guia 23Documento4 páginasAnexos Guia 23Shelly StefhanyAún no hay calificaciones
- Bases 180 2021Documento11 páginasBases 180 2021Shelly StefhanyAún no hay calificaciones
- Navidad Con MishaDocumento2 páginasNavidad Con MishaShelly StefhanyAún no hay calificaciones
- Estructuras HidraulicasDocumento8 páginasEstructuras HidraulicasShelly StefhanyAún no hay calificaciones
- Revisiòn de Diptico 1 Del 20 de Abril.Documento13 páginasRevisiòn de Diptico 1 Del 20 de Abril.Shelly StefhanyAún no hay calificaciones
- Actividad DipticoDocumento13 páginasActividad DipticoShelly StefhanyAún no hay calificaciones
- 1 Lectura - Viernes 16 AbrilDocumento13 páginas1 Lectura - Viernes 16 AbrilShelly StefhanyAún no hay calificaciones
- Revisiòn de Diptico 1 Del 20 de Abril.Documento13 páginasRevisiòn de Diptico 1 Del 20 de Abril.Shelly StefhanyAún no hay calificaciones
- Codigo de Colores para Tachos de ReciclajeDocumento7 páginasCodigo de Colores para Tachos de ReciclajeShelly StefhanyAún no hay calificaciones
- 28ABRIL-Construyo Ident Pers y FamiliarDocumento19 páginas28ABRIL-Construyo Ident Pers y FamiliarShelly StefhanyAún no hay calificaciones
- Terraza: Planta 1° PisoDocumento1 páginaTerraza: Planta 1° PisoShelly StefhanyAún no hay calificaciones
- Escribo Mis DecisionesDocumento10 páginasEscribo Mis DecisionesShelly StefhanyAún no hay calificaciones
- Bienvenidos - 15 MarzoDocumento7 páginasBienvenidos - 15 MarzoShelly StefhanyAún no hay calificaciones
- 1 Norma G 050Documento44 páginas1 Norma G 050Shelly StefhanyAún no hay calificaciones
- Bienvenidos - 15 MarzoDocumento7 páginasBienvenidos - 15 MarzoShelly StefhanyAún no hay calificaciones
- UC 2 Peligros y Riesgos en La ConstrucciónDocumento12 páginasUC 2 Peligros y Riesgos en La ConstrucciónHarold Heredia TaipeAún no hay calificaciones
- Cuaderno de Campo IiDocumento26 páginasCuaderno de Campo IiShelly StefhanyAún no hay calificaciones
- Diapositivas EVE-SSU-ENCUENTRO VIRTUALDocumento14 páginasDiapositivas EVE-SSU-ENCUENTRO VIRTUALShelly StefhanyAún no hay calificaciones
- Actividad 07 Estabilidad y Determinacion de EstructurasDocumento10 páginasActividad 07 Estabilidad y Determinacion de EstructurasShelly Stefhany100% (1)
- Actividad 15 (Teoria)Documento8 páginasActividad 15 (Teoria)Shelly StefhanyAún no hay calificaciones
- Actividad 15 Mecanica de Fluidos IDocumento6 páginasActividad 15 Mecanica de Fluidos IShelly StefhanyAún no hay calificaciones
- Ecuaciones simplificadas para el cálculo de alcantarillado sanitario y pluvialDocumento10 páginasEcuaciones simplificadas para el cálculo de alcantarillado sanitario y pluvialOmar1991Aún no hay calificaciones
- Trabajo de Fluidos Foro PDFDocumento12 páginasTrabajo de Fluidos Foro PDFShelly StefhanyAún no hay calificaciones
- Actividad 14 Hidrologia GrupalDocumento20 páginasActividad 14 Hidrologia GrupalShelly StefhanyAún no hay calificaciones
- Actividad 14 MÉTODO DE LOS TRES MOMENTOSDocumento11 páginasActividad 14 MÉTODO DE LOS TRES MOMENTOSShelly StefhanyAún no hay calificaciones
- Trabajo PDFDocumento7 páginasTrabajo PDFShelly StefhanyAún no hay calificaciones
- MATERIAL DE APOYO IIEE - 1er Nivel ILumDocumento1 páginaMATERIAL DE APOYO IIEE - 1er Nivel ILumJUAN CARLOS CANORIO NANOAún no hay calificaciones
- Ua 1Documento21 páginasUa 1Marco DanielAún no hay calificaciones
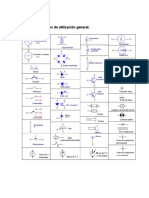
- Simbología eléctrica automóvilesDocumento103 páginasSimbología eléctrica automóvilesFreiner Jose Bello100% (1)
- Proyecto Final TdeDocumento98 páginasProyecto Final TdeevelynAún no hay calificaciones
- Importar Hojas de Excel A MySQLDocumento5 páginasImportar Hojas de Excel A MySQLAntonio JorgeAún no hay calificaciones
- CVJPF PDFDocumento2 páginasCVJPF PDFlorenaAún no hay calificaciones
- Masterlab - 4505Documento11 páginasMasterlab - 4505Antony SalasAún no hay calificaciones
- 100 Ejercicios HTMLDocumento7 páginas100 Ejercicios HTMLJose Rafael Cace ResAún no hay calificaciones
- Glosario Del Software y HardwareDocumento20 páginasGlosario Del Software y HardwareAylin R Lopez Barrera100% (1)
- Analisis de Falla Brida PSV 2104B (00000002)Documento4 páginasAnalisis de Falla Brida PSV 2104B (00000002)jose corrosionAún no hay calificaciones
- Tecnicas de CampoDocumento3 páginasTecnicas de CampoFavio VelazcoAún no hay calificaciones
- Granulometría de Materiales Compactables para TerraceriasDocumento6 páginasGranulometría de Materiales Compactables para TerraceriasRamiro RomeroAún no hay calificaciones
- 2-ICE2614-Clasificación y Compactación PDFDocumento103 páginas2-ICE2614-Clasificación y Compactación PDFMatíasZúñigaAún no hay calificaciones
- Reglamento de Conexiones Multiples PDFDocumento4 páginasReglamento de Conexiones Multiples PDFmomv9Aún no hay calificaciones
- Códigos de Fallas Cummins en Español ISX SignatureDocumento3 páginasCódigos de Fallas Cummins en Español ISX SignatureLaura Castuera HerreraAún no hay calificaciones
- Generación Eléctrica Basada en Vórtice Gravitacional, Una Opción para La Provisión Sustentable de Energía Eléctrica en La Zona Rural Del Cantón LojaDocumento11 páginasGeneración Eléctrica Basada en Vórtice Gravitacional, Una Opción para La Provisión Sustentable de Energía Eléctrica en La Zona Rural Del Cantón LojaJorge Luis Jaramillo Pacheco100% (1)
- Curso HidraulicaDocumento95 páginasCurso HidraulicaRichard Quispe Salas100% (1)
- Tesis Con Camara IpDocumento9 páginasTesis Con Camara IpVladimir Quispe OrihuelaAún no hay calificaciones
- Diseño estructural sismo resistente en hormigón armado de un edificio de cuatro plantasDocumento95 páginasDiseño estructural sismo resistente en hormigón armado de un edificio de cuatro plantasJavierAún no hay calificaciones
- Estequiometria de Una ReacciónDocumento7 páginasEstequiometria de Una ReacciónAna Cristina Pérez IsaacsAún no hay calificaciones
- Componentes Electronicos 1.ppsDocumento18 páginasComponentes Electronicos 1.ppsjohannsedAún no hay calificaciones
- Física QuimicaDocumento67 páginasFísica QuimicaHectorAún no hay calificaciones
- Dell Latitude E6400 ATG Spec SheetDocumento2 páginasDell Latitude E6400 ATG Spec SheetObed LOAún no hay calificaciones
- Impermeabilizacion de Balsas 38-46 PDFDocumento8 páginasImpermeabilizacion de Balsas 38-46 PDFDiego Rojas MendizábalAún no hay calificaciones
- IT-564 Lab - Telecomunicaciones IIDocumento1 páginaIT-564 Lab - Telecomunicaciones IILuis Alonso ChoqueAún no hay calificaciones
- Colegio Vocacional Monseñor SanabriaDocumento17 páginasColegio Vocacional Monseñor SanabriaCristopher MartinezAún no hay calificaciones
- Caso PracticoDocumento3 páginasCaso PracticoSammy Pa56% (9)
- Examen de Frenos de CamionDocumento3 páginasExamen de Frenos de CamionChristian Vásquez BasilioAún no hay calificaciones
- Fallas en El Pavimento AsfalticoDocumento5 páginasFallas en El Pavimento AsfalticoDanilo TipanAún no hay calificaciones
- Plan Regulador ConcepcionDocumento75 páginasPlan Regulador ConcepcionPedro Salas100% (1)
- Iso 22301 2012Documento38 páginasIso 22301 2012AdolfoMontesAún no hay calificaciones
- Reforzamiento Con CableboltingDocumento6 páginasReforzamiento Con CableboltingTJ NolascoAún no hay calificaciones