También podría gustarte
- Calculo Ii - Esan - Economía y Negocios Int PDFDocumento183 páginasCalculo Ii - Esan - Economía y Negocios Int PDFDanna Mirella PAMPA RASHTAAún no hay calificaciones
- Balances de EnergíaDocumento28 páginasBalances de EnergíaAgustín BonilloAún no hay calificaciones
- Ejercicios Matrices.Documento2 páginasEjercicios Matrices.pinskemn0% (3)
- Examen Medio Ciclo - Estática Abril 2022Documento6 páginasExamen Medio Ciclo - Estática Abril 2022Karen SantosAún no hay calificaciones
- Guia Teorica de Matrices 5to Ano 2dolapso PDFDocumento5 páginasGuia Teorica de Matrices 5to Ano 2dolapso PDFMarco AntonioAún no hay calificaciones
- Matrices ClaseDocumento33 páginasMatrices ClaseBinarydeathAún no hay calificaciones
- Matrices y DeterminantesDocumento21 páginasMatrices y DeterminantesJuan FigueroaAún no hay calificaciones
- Unidad 2 Matrices y DeterminantesDocumento37 páginasUnidad 2 Matrices y DeterminantesXimena RendonAún no hay calificaciones
- Unidad 1 MatricesDocumento114 páginasUnidad 1 MatricesSasori0% (2)
- Tema 3Documento16 páginasTema 3fabiana MoralesAún no hay calificaciones
- Lectura de Matrices y DeterminantesDocumento11 páginasLectura de Matrices y DeterminantesJesus Mario ZamoraAún no hay calificaciones
- Matrices 2023Documento38 páginasMatrices 2023sabriAún no hay calificaciones
- PR Actico 2Documento3 páginasPR Actico 2Mark NashAún no hay calificaciones
- Resumen Matrices Marielmates 3Documento2 páginasResumen Matrices Marielmates 3alba perez audenAún no hay calificaciones
- Determinantes A1tema7-0809Documento7 páginasDeterminantes A1tema7-0809alan britoAún no hay calificaciones
- SEMANA 2 NB Algebra Lineal U1 p1 Clas2Documento47 páginasSEMANA 2 NB Algebra Lineal U1 p1 Clas2Gary Lucas VeraAún no hay calificaciones
- Nociones Basicas de Algebra MatricialDocumento17 páginasNociones Basicas de Algebra MatricialJosé Montaño Romero0% (1)
- Guía Teórica #1 ALGEBRA LINEALDocumento8 páginasGuía Teórica #1 ALGEBRA LINEALErnesto RuizAún no hay calificaciones
- Diapo18 (1) Matemática 1 UPDocumento18 páginasDiapo18 (1) Matemática 1 UPGrsummerAún no hay calificaciones
- Algebra de MatricesDocumento17 páginasAlgebra de MatricesMaria MartinezAún no hay calificaciones
- Matrices-Universidad de SevillaDocumento18 páginasMatrices-Universidad de SevillaDennis Baldeon OrtizAún no hay calificaciones
- Definicion - Propiedades e Igualdad de Matrices PDFDocumento6 páginasDefinicion - Propiedades e Igualdad de Matrices PDFMauricio JF.Aún no hay calificaciones
- Álgebra LinealDocumento76 páginasÁlgebra LinealDeivys CaraballoAún no hay calificaciones
- Matrices Simbologia y OperacioncesDocumento15 páginasMatrices Simbologia y OperacioncesjuliethAún no hay calificaciones
- Clase 2Documento58 páginasClase 2noniAún no hay calificaciones
- Matrices LibroDocumento67 páginasMatrices LibroAngel Huaripata SanchezAún no hay calificaciones
- 2022 LI Unidad 1 MatricesDocumento29 páginas2022 LI Unidad 1 MatricesflachulazarteAún no hay calificaciones
- Aplicaciones de Las Propiedades Matriciales A Una Matriz de 4x4Documento8 páginasAplicaciones de Las Propiedades Matriciales A Una Matriz de 4x4Peter ArguetaAún no hay calificaciones
- MatricesDocumento28 páginasMatricesIsrael Leyton RodriguezAún no hay calificaciones
- Matrices y DeterminantesDocumento10 páginasMatrices y DeterminantesJ DAún no hay calificaciones
- Matrices y Determinantes IIDocumento7 páginasMatrices y Determinantes IIjose condoriAún no hay calificaciones
- Leccion 1 - MatricesDocumento6 páginasLeccion 1 - MatricesProtyAún no hay calificaciones
- Semana 02Documento33 páginasSemana 02Peláez Taipe Rafael FabritzioAún no hay calificaciones
- Infmi GRP01Documento7 páginasInfmi GRP01VladyAún no hay calificaciones
- Determinantes - Doc ApuntesDocumento12 páginasDeterminantes - Doc ApuntesadrianansuarezAún no hay calificaciones
- S 2 PPT DeterminantesDocumento32 páginasS 2 PPT DeterminantesAlex Navarro MartinezAún no hay calificaciones
- Matrices y DeterminantesDocumento25 páginasMatrices y DeterminantesDARWINSOLAún no hay calificaciones
- Algebra 2019-20Documento167 páginasAlgebra 2019-20gago_1983Aún no hay calificaciones
- U3 1Documento7 páginasU3 1HEAE911023 AGUILARAún no hay calificaciones
- Espacio de Estados ApuntesDocumento39 páginasEspacio de Estados ApuntesCésar Emmanuel Abarca PérezAún no hay calificaciones
- Matriz InversaDocumento18 páginasMatriz InversaDOMINGO DE JESUS MENDOZA PINTOAún no hay calificaciones
- Matrices y Sistemas de EcuacionesDocumento30 páginasMatrices y Sistemas de EcuacionesAlexis Eduardo Almendras ValdebenitoAún no hay calificaciones
- Matrices-Capitulo 13-Matematica-Basica Moises Villena MuñozDocumento23 páginasMatrices-Capitulo 13-Matematica-Basica Moises Villena MuñozEduardo Reyes100% (1)
- Cap13matrices 150906163848 Lva1 App6891 PDFDocumento23 páginasCap13matrices 150906163848 Lva1 App6891 PDFEduardo ReyesAún no hay calificaciones
- Sesión 1.2 A-LINEALDocumento15 páginasSesión 1.2 A-LINEALdaniela.rojas.oAún no hay calificaciones
- TEMA 1 - Matrices y Sistemas de Ecuaciones LinealesDocumento22 páginasTEMA 1 - Matrices y Sistemas de Ecuaciones LinealesalanAún no hay calificaciones
- ProblemarioDocumento24 páginasProblemarioapi-224327481Aún no hay calificaciones
- Apuntes Primera Unidad Parte 1Documento6 páginasApuntes Primera Unidad Parte 1Alfredo CamposAún no hay calificaciones
- Matrices y DeterminantesDocumento14 páginasMatrices y DeterminantesJorge Zegarra LequernaqueAún no hay calificaciones
- Matrices y DeterminantesDocumento44 páginasMatrices y Determinanteslrincon78Aún no hay calificaciones
- Matrices y Sistemas Modo de CompatibilidadDocumento34 páginasMatrices y Sistemas Modo de Compatibilidadangelagp2295Aún no hay calificaciones
- Clase5 ComplementoDocumento26 páginasClase5 ComplementozzzAún no hay calificaciones
- Matrices y DeterminantesDocumento31 páginasMatrices y DeterminantesBryan GiovanniAún no hay calificaciones
- Determinante - Sistema de Ec PDFDocumento20 páginasDeterminante - Sistema de Ec PDFJessica EstevesAún no hay calificaciones
- Capitulo 1Documento41 páginasCapitulo 1Alex HolguinoAún no hay calificaciones
- Propiedades Algebra LinealDocumento6 páginasPropiedades Algebra Linealxel_billyxAún no hay calificaciones
- AlgebraTema2Teoria (10 11) PDFDocumento17 páginasAlgebraTema2Teoria (10 11) PDFSonia HernándezAún no hay calificaciones
- Practicas de AL Trabajo en Grupo Tarea 1Documento7 páginasPracticas de AL Trabajo en Grupo Tarea 1Jonathan StalinAún no hay calificaciones
- Ejercicios de Matrices y Álgebra LinealDe EverandEjercicios de Matrices y Álgebra LinealCalificación: 5 de 5 estrellas5/5 (1)
- 4 DiodosDocumento33 páginas4 DiodosAgustín BonilloAún no hay calificaciones
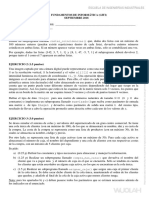
- Septiembre 2018 (SR)Documento1 páginaSeptiembre 2018 (SR)Agustín BonilloAún no hay calificaciones
- Septiembre 2015 (SR)Documento1 páginaSeptiembre 2015 (SR)Agustín BonilloAún no hay calificaciones
- Septiembre 2014 (SR)Documento1 páginaSeptiembre 2014 (SR)Agustín BonilloAún no hay calificaciones
- 2 Circuitos SecuencialesDocumento59 páginas2 Circuitos SecuencialesAgustín BonilloAún no hay calificaciones
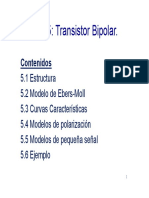
- 5 Transitor BipolarDocumento32 páginas5 Transitor BipolarAgustín BonilloAún no hay calificaciones
- TEMA 1 - Espacios Vectoriales. Aplicaciones LinealesDocumento41 páginasTEMA 1 - Espacios Vectoriales. Aplicaciones LinealesAgustín BonilloAún no hay calificaciones
- 1 Circuitos CombinacionalesDocumento31 páginas1 Circuitos CombinacionalesAgustín BonilloAún no hay calificaciones
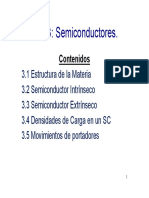
- 3 SemiconductoresDocumento27 páginas3 SemiconductoresAgustín BonilloAún no hay calificaciones
- TEMA 1 - EjerciciosDocumento13 páginasTEMA 1 - EjerciciosAgustín Bonillo100% (1)
- TEMA 3 - Formas Bilineales y CuadraticasDocumento46 páginasTEMA 3 - Formas Bilineales y CuadraticasAgustín BonilloAún no hay calificaciones
- 6 Relacion Corriente AlternaDocumento20 páginas6 Relacion Corriente AlternaAgustín BonilloAún no hay calificaciones
- TEMA 1 - Ejercicios en TransparenciasDocumento8 páginasTEMA 1 - Ejercicios en TransparenciasAgustín BonilloAún no hay calificaciones
- TEMA 2 - Diagonalización de EndomorfismosDocumento34 páginasTEMA 2 - Diagonalización de EndomorfismosAgustín BonilloAún no hay calificaciones
- Ejercicios ResueltosDocumento9 páginasEjercicios ResueltosAgustín BonilloAún no hay calificaciones
- 8 AmplificaciónDocumento52 páginas8 AmplificaciónAgustín BonilloAún no hay calificaciones
- 08 JunioDocumento3 páginas08 JunioAgustín BonilloAún no hay calificaciones
- Solucion Ejercicio Libreta Nivelacion3Documento1 páginaSolucion Ejercicio Libreta Nivelacion3Agustín BonilloAún no hay calificaciones
- 11 JunioDocumento1 página11 JunioAgustín BonilloAún no hay calificaciones
- Apuntes Balance de Materia y Energia 2004Documento88 páginasApuntes Balance de Materia y Energia 2004Jose Kalvin Rojas Sosa89% (9)
- Reseña de Señal de Nivelación: 522022 SS PorchesDocumento1 páginaReseña de Señal de Nivelación: 522022 SS PorchesAgustín BonilloAún no hay calificaciones
- Álgebra Lineal Semana 2 - OCDocumento23 páginasÁlgebra Lineal Semana 2 - OCEmiliano Ramiro RuizAún no hay calificaciones
- T1 - Vectores en El Espacio - Farid Castro. Mariana Coral. Jorge Jacobo. Alma RamírezDocumento26 páginasT1 - Vectores en El Espacio - Farid Castro. Mariana Coral. Jorge Jacobo. Alma RamírezFarid E Castro TzabAún no hay calificaciones
- Capitulo 4 y 5 Lineal ApuntesDocumento50 páginasCapitulo 4 y 5 Lineal ApuntesL̶u̶i̶s̶ P̶i̶l̶c̶o̶Aún no hay calificaciones
- Algebra-4 4Documento20 páginasAlgebra-4 4jesusAún no hay calificaciones
- Actividad Segundo CorteDocumento42 páginasActividad Segundo CorteLIZETH GUASCAAún no hay calificaciones
- Tarea 5 Algebra LinealDocumento3 páginasTarea 5 Algebra LinealMartin GomezAún no hay calificaciones
- U1T1 Reporte Lectura..Documento3 páginasU1T1 Reporte Lectura..JUAN JOSE LOPEZ SIFUENTESAún no hay calificaciones
- Fisica y QuimicaDocumento4 páginasFisica y QuimicarubenAún no hay calificaciones
- Semana 02 - VectoresDocumento34 páginasSemana 02 - VectoresEMERSONAún no hay calificaciones
- Álgebra Lineal Serie 1Documento2 páginasÁlgebra Lineal Serie 1Iván RodrigoAún no hay calificaciones
- GuiaT L2Documento10 páginasGuiaT L2José MenesesAún no hay calificaciones
- P 09 Al or 2019 IDocumento6 páginasP 09 Al or 2019 IcarlosAún no hay calificaciones
- Lineal Taller 1Documento4 páginasLineal Taller 1carlosAún no hay calificaciones
- 4.10 Derivada Direccional Gradiente Diver Gen CIA y RotacionalDocumento21 páginas4.10 Derivada Direccional Gradiente Diver Gen CIA y RotacionalJuan Mcfly Badillo75% (4)
- (1.7) Independencia Lineal PDFDocumento2 páginas(1.7) Independencia Lineal PDFlina sofia ortega100% (1)
- CONTEXTUALIZADO DE ALGEBRA Semestre2Documento17 páginasCONTEXTUALIZADO DE ALGEBRA Semestre2Rolando Martinez AnilloAún no hay calificaciones
- JP - Cambio de BaseDocumento14 páginasJP - Cambio de BaseLuisinhoGonzalesAún no hay calificaciones
- MPE - Espacios Vectoriales Conceptos Básicos - NC PRELIMINAR2 (2020-08)Documento16 páginasMPE - Espacios Vectoriales Conceptos Básicos - NC PRELIMINAR2 (2020-08)Ivan cabrejo millAún no hay calificaciones
- Actividad 3 Algebra Dylan BernalDocumento8 páginasActividad 3 Algebra Dylan Bernaldylan bernalAún no hay calificaciones
- Espacios VectorialesDocumento3 páginasEspacios VectorialesDarlly Michelle Canas DelgadoAún no hay calificaciones
- TAREA TEMA1 Mat 103 PDFDocumento1 páginaTAREA TEMA1 Mat 103 PDFJuan daniel Torrez vidaurreAún no hay calificaciones
- De Lec 1Documento42 páginasDe Lec 1Olha SharhorodskaAún no hay calificaciones
- 2021 - Ordinaria - Examen Matemáticas II - MadridDocumento17 páginas2021 - Ordinaria - Examen Matemáticas II - MadridCarlosAún no hay calificaciones
- VectoresDocumento11 páginasVectoresMalw Dark100% (39)
- 5 TodoDocumento56 páginas5 TodoAARON SEBASTIAN CHIRIBOGA TOAPANTAAún no hay calificaciones
- Trabajo GeometriaDocumento15 páginasTrabajo GeometriaStephany TorrealbaAún no hay calificaciones
- Mas Funciones ExcelDocumento215 páginasMas Funciones ExcelHenry JaponAún no hay calificaciones
- Espacio EuclídeoDocumento3 páginasEspacio EuclídeoGaizka Fernandez PujanaAún no hay calificaciones