También podría gustarte
- Capitulo IIIDocumento46 páginasCapitulo IIIjesusjc0504x100% (2)
- Entregable 2Documento10 páginasEntregable 2Gustavo TorresAún no hay calificaciones
- P-4 Formato UJTDocumento4 páginasP-4 Formato UJTergrAún no hay calificaciones
- DSM E1Documento5 páginasDSM E1Armando JuarezAún no hay calificaciones
- Simulación de Piezas Con HAASDocumento4 páginasSimulación de Piezas Con HAASAlejandro RuizAún no hay calificaciones
- Electroneumatica EjemploDocumento5 páginasElectroneumatica EjemploMartin FranciscoAún no hay calificaciones
- Prueba 1 PDFDocumento62 páginasPrueba 1 PDFMartin Gutierrez SalazarAún no hay calificaciones
- Cálculo de RodamientoDocumento10 páginasCálculo de RodamientoJesus RomanAún no hay calificaciones
- Memoria de GasDocumento4 páginasMemoria de GasIsmaelChamuAlonzo100% (1)
- Tablas y Graficos de CojinetesDocumento51 páginasTablas y Graficos de CojinetesVictor Gimenez100% (2)
- Ficha Técnica Acrílico Plastiglas: Propiedades Físicas Y MecánicasDocumento2 páginasFicha Técnica Acrílico Plastiglas: Propiedades Físicas Y MecánicasAlex Arturo Montesinos VenegasAún no hay calificaciones
- Metodología Diseño Instalaciones Hidráulicas 04Documento8 páginasMetodología Diseño Instalaciones Hidráulicas 04bersain jimenez hernandezAún no hay calificaciones
- Semana 04 - CADENAS DE TRANSMISION DE POTENCIADocumento40 páginasSemana 04 - CADENAS DE TRANSMISION DE POTENCIAWIL JOHAN SALAZAR RICALDIAún no hay calificaciones
- Proyecto en Ingeniería MecanicoDocumento51 páginasProyecto en Ingeniería MecanicoJhon Carlos Aquino CalizayaAún no hay calificaciones
- Transmisiones Flexibles Robert Hdez OrtegaDocumento58 páginasTransmisiones Flexibles Robert Hdez OrtegaKarla roblesAún no hay calificaciones
- Ejercicio 1 CaudalesDocumento29 páginasEjercicio 1 CaudalesJorge Luis Calizaya ApazaAún no hay calificaciones
- User Manual SPC-7000-SPANISH Web-0629Documento30 páginasUser Manual SPC-7000-SPANISH Web-0629James Jimenez LeonAún no hay calificaciones
- Calculador Perdidas de CargaDocumento13 páginasCalculador Perdidas de CargarosmeryAún no hay calificaciones
- Los Parques E Licos de La Ventosa, OaxacaDocumento47 páginasLos Parques E Licos de La Ventosa, OaxacardelgranadoAún no hay calificaciones
- Box Jenkins y WintersDocumento6 páginasBox Jenkins y WintersergrAún no hay calificaciones
- Manua Poleas en V IntermecDocumento327 páginasManua Poleas en V IntermecMrDORMOSAún no hay calificaciones
- Calculo Darcy Carcamo 1Documento3 páginasCalculo Darcy Carcamo 1Coro Sendero RealAún no hay calificaciones
- Entregable 1completoDocumento22 páginasEntregable 1completoAntonio Segundo MoraAún no hay calificaciones
- CadenasDocumento8 páginasCadenasyenny carolina bernal rinconAún no hay calificaciones
- Análisis de TermografíaDocumento11 páginasAnálisis de TermografíaDeysi Noalcca GutierrezAún no hay calificaciones
- DimmerDocumento14 páginasDimmerKarina QCAún no hay calificaciones
- Teoria de Krinberg MerchantDocumento208 páginasTeoria de Krinberg MerchantLokitoPaTlpvRomeroHernandezAún no hay calificaciones
- Cajas ReductorasDocumento22 páginasCajas ReductorasSalo Henriquez0% (1)
- La Relacion de Compresion de Un Ciclo de Otto de Aire Estandar Es 9 5 PDF FreeDocumento3 páginasLa Relacion de Compresion de Un Ciclo de Otto de Aire Estandar Es 9 5 PDF FreeCARLOS MIGUEL HIDALGO ROBLESAún no hay calificaciones
- Diseño de Sistemas Mecánicos - Seminario de ReductoresDocumento20 páginasDiseño de Sistemas Mecánicos - Seminario de ReductoresArmando JuarezAún no hay calificaciones
- Calculo de MarínDocumento15 páginasCalculo de MarínnachoAún no hay calificaciones
- TermoconformadoDocumento8 páginasTermoconformadoCarmen Sanchez LlanoAún no hay calificaciones
- Catalogo CRVL D S&P 211020Documento26 páginasCatalogo CRVL D S&P 211020Eduardo Ceja100% (1)
- Solucion Prob. Bomba - Ventil.Documento9 páginasSolucion Prob. Bomba - Ventil.Anonymous 69Aún no hay calificaciones
- Examen 2 CAMDocumento12 páginasExamen 2 CAMSalvador BortoliniAún no hay calificaciones
- Uniones AtornilladasDocumento19 páginasUniones AtornilladasJeffer Alexander Arbildo BalrodanoAún no hay calificaciones
- Carga Total de La BombaDocumento2 páginasCarga Total de La Bombaanglejalgo100% (1)
- Practica de TornoDocumento6 páginasPractica de TornoFernando Alejos MolinaAún no hay calificaciones
- Proyecto FimeDocumento9 páginasProyecto FimeAngel Vidal100% (1)
- Programa de LubricacionDocumento15 páginasPrograma de LubricacionZeik Ivan100% (1)
- Soldadura de PlásticosDocumento22 páginasSoldadura de PlásticosEva HermosillaAún no hay calificaciones
- Rodamientos y Cojinetes PDFDocumento28 páginasRodamientos y Cojinetes PDFJose RomeroAún no hay calificaciones
- Tension Angulo Atornillado Revision Aisc LRFDDocumento8 páginasTension Angulo Atornillado Revision Aisc LRFDJose Carlos Franco ReyesAún no hay calificaciones
- Trabajo de FajasDocumento99 páginasTrabajo de FajaskenyiAún no hay calificaciones
- Valvula Caudal MinimoDocumento4 páginasValvula Caudal MinimoPatricio Antonio Cortés Peña100% (1)
- Estandares para La Medición y Evaluación de LaDocumento9 páginasEstandares para La Medición y Evaluación de LaIvanOsoPeresosoAún no hay calificaciones
- SubestacionDocumento4 páginasSubestacionAntonio Vinajeras GonzalezAún no hay calificaciones
- MM2. T. 03. Placas y Envolventes Delgadas-Recipientes A Presión. 10-09-2015-IIDocumento18 páginasMM2. T. 03. Placas y Envolventes Delgadas-Recipientes A Presión. 10-09-2015-IIYherson Cerin ChavarriaAún no hay calificaciones
- CadenasDocumento20 páginasCadenasCristhopfer CastroAún no hay calificaciones
- LATAM Brochure 2018 BBB4 PDFDocumento6 páginasLATAM Brochure 2018 BBB4 PDFAndres Byke SepulvedaAún no hay calificaciones
- Edesa 1Documento16 páginasEdesa 1jopemu64Aún no hay calificaciones
- Ajuste Ejemplos y DefDocumento6 páginasAjuste Ejemplos y DefAngel HernándezAún no hay calificaciones
- 6 Sujetadores RoscadosDocumento13 páginas6 Sujetadores RoscadosLuis OliveroAún no hay calificaciones
- Cálculos para Selección de VentiladorDocumento2 páginasCálculos para Selección de VentiladorJohan MedellinAún no hay calificaciones
- TornoDocumento12 páginasTornostephany ramosAún no hay calificaciones
- Errores Por Instrumento o Equipos de MedicionDocumento5 páginasErrores Por Instrumento o Equipos de MedicionAndrywPinaAún no hay calificaciones
- Analisis de VibracionesDocumento14 páginasAnalisis de VibracionesDANIELA SMITH HERNANDEZ GUAQUETAAún no hay calificaciones
- Diseño de Un Grupo de Tornillos en Una Conexión ExcéntricaDocumento4 páginasDiseño de Un Grupo de Tornillos en Una Conexión Excéntricakloic1980Aún no hay calificaciones
- Teoria de FallasDocumento11 páginasTeoria de Fallasedwin espinozaAún no hay calificaciones
- Energía de DistorsiónDocumento8 páginasEnergía de DistorsiónTaylor de la VegaAún no hay calificaciones
- Examen Probabilidad HPDocumento5 páginasExamen Probabilidad HPTatiana RicoAún no hay calificaciones
- Pasos para Formatear Una ComputadoraDocumento2 páginasPasos para Formatear Una ComputadoraAngel Matthew de Mirnd-RodAún no hay calificaciones
- Valorar para Crear ValorDocumento16 páginasValorar para Crear ValorNelson Reyes MolinaAún no hay calificaciones
- caral-EdiFicio CentralDocumento3 páginascaral-EdiFicio CentralYeltsin Perez PradoAún no hay calificaciones
- Baropodometric Analysis of Changes in Plantar Biomechanics After Total Knee ArthroplastyDocumento12 páginasBaropodometric Analysis of Changes in Plantar Biomechanics After Total Knee ArthroplastyGerardo Sanchez MagañaAún no hay calificaciones
- Minerales Formadores de Rocas CLASE 1Documento13 páginasMinerales Formadores de Rocas CLASE 1MaximimilianoAún no hay calificaciones
- Session2 SI 2017Documento23 páginasSession2 SI 2017Vanessa SanchezAún no hay calificaciones
- Problemas Resueltos de Transmisión de Calor (U.Sevilla)Documento65 páginasProblemas Resueltos de Transmisión de Calor (U.Sevilla)rubiohot6975% (4)
- Apuntes Histologia DefinitivosDocumento84 páginasApuntes Histologia DefinitivosCarlos MartínezAún no hay calificaciones
- CircuitoDocumento6 páginasCircuitoViktorMigelAún no hay calificaciones
- Turismo GastronomicoDocumento10 páginasTurismo GastronomicoJoahan Fernando Cruz HeleriaAún no hay calificaciones
- Orga Ultimo ReporteDocumento3 páginasOrga Ultimo ReporteosmairynAún no hay calificaciones
- Test Es Usted NegociadorDocumento5 páginasTest Es Usted NegociadorStephany VillanuevaAún no hay calificaciones
- Articulos 473 Al 480 de La Ley Federal Del TrabajoDocumento5 páginasArticulos 473 Al 480 de La Ley Federal Del TrabajoAldher Saucedo100% (2)
- Ingenieria de Valuaciones - 2019!15!03Documento111 páginasIngenieria de Valuaciones - 2019!15!03Denis Osorio Quinte67% (3)
- Carlos HellerDocumento21 páginasCarlos HellerLuis Gustavo MartinezAún no hay calificaciones
- Hoja de Vida Planta CATERPILLARDocumento10 páginasHoja de Vida Planta CATERPILLARJose Alejandro RamirezAún no hay calificaciones
- Estructura y Sintaxis de Los LenguajesDocumento15 páginasEstructura y Sintaxis de Los LenguajesAndres E. Torrealba T.Aún no hay calificaciones
- Colitis Dieta PDFDocumento2 páginasColitis Dieta PDFLukeAún no hay calificaciones
- GUIA FOTOSINTESIS de Naturaleza 6 BasicoDocumento4 páginasGUIA FOTOSINTESIS de Naturaleza 6 BasicoPatricia Alejandra Perez SeguraAún no hay calificaciones
- Guia FisicaDocumento6 páginasGuia FisicaAngie AzuajeAún no hay calificaciones
- Reflexión Sobre El Modelo de La Escuela Tradicionalista Y La Escuela NuevaDocumento2 páginasReflexión Sobre El Modelo de La Escuela Tradicionalista Y La Escuela Nuevaguz_men100% (1)
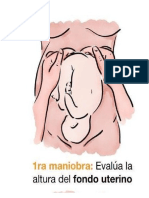
- En Que Consiste Cada Maniobra de LiopolDocumento11 páginasEn Que Consiste Cada Maniobra de LiopolAndres BuesoAún no hay calificaciones
- Caso Clínico Obesidad InfantilDocumento5 páginasCaso Clínico Obesidad InfantilPaola BejaranoAún no hay calificaciones
- 1 Generalidades Alcantarillado LRMNDocumento22 páginas1 Generalidades Alcantarillado LRMNLenin MaldonadoAún no hay calificaciones
- Nemesis Serie2way Installguide EliteDocumento2 páginasNemesis Serie2way Installguide EliteJohnAún no hay calificaciones
- 1° Informe Ley de NewtonDocumento10 páginas1° Informe Ley de NewtonLucia Pacheco VasquezAún no hay calificaciones
- FOR-45-1-05-12 Formato Gestion Del Cambio SSTDocumento2 páginasFOR-45-1-05-12 Formato Gestion Del Cambio SSTsst iterumAún no hay calificaciones
- Cronología de Los Libros Isaac AsimovDocumento44 páginasCronología de Los Libros Isaac AsimovJavier GonzalezAún no hay calificaciones
- Criterios Evaluacion Con EjemplosDocumento34 páginasCriterios Evaluacion Con EjemplosAngelGoyzuetaAranaAún no hay calificaciones