También podría gustarte
- Informe 27Documento3 páginasInforme 27Julian DavidAún no hay calificaciones
- Expo ApoyoDocumento3 páginasExpo ApoyoJulian DavidAún no hay calificaciones
- Informe 27Documento8 páginasInforme 27Julian DavidAún no hay calificaciones
- Atm Rdsi FinalDocumento20 páginasAtm Rdsi FinalJulian DavidAún no hay calificaciones
- Informe 27Documento6 páginasInforme 27Julian DavidAún no hay calificaciones
- Informe 3 RafaelDocumento12 páginasInforme 3 RafaelJulian DavidAún no hay calificaciones
- Informe 3Documento11 páginasInforme 3Julian DavidAún no hay calificaciones
- Calculo Informe 3Documento2 páginasCalculo Informe 3Julian DavidAún no hay calificaciones
- Informe 3Documento11 páginasInforme 3Julian DavidAún no hay calificaciones
- Grupo3 Guia 1Documento2 páginasGrupo3 Guia 1Julian DavidAún no hay calificaciones
- Informe 3Documento11 páginasInforme 3Julian DavidAún no hay calificaciones
- Informe 1Documento6 páginasInforme 1Julian DavidAún no hay calificaciones
- Lab 1 8 SeptDocumento2 páginasLab 1 8 SeptJulian DavidAún no hay calificaciones
- Electronica 3 Informe 2Documento5 páginasElectronica 3 Informe 2Julian DavidAún no hay calificaciones
- Laboratorio 1 - Sensores PDFDocumento6 páginasLaboratorio 1 - Sensores PDFJulian DavidAún no hay calificaciones
- Laboratorio 1 - Sensores PDFDocumento6 páginasLaboratorio 1 - Sensores PDFJulian DavidAún no hay calificaciones
- CTD-CP - Prenvest (B)Documento2 páginasCTD-CP - Prenvest (B)Katherinne Garzon0% (2)
- Hegemonía HolandesaDocumento3 páginasHegemonía HolandesaMauricio MaldadAún no hay calificaciones
- Trabajo Mate BacteriasDocumento6 páginasTrabajo Mate BacteriasBryan Alexander P. VegaAún no hay calificaciones
- Taller 17 y 18 Grado NovenoDocumento3 páginasTaller 17 y 18 Grado NovenoHaswledy Gonzalez CasallasAún no hay calificaciones
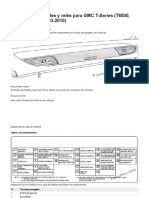
- Digrama Fusibles GMC t7500 2006Documento8 páginasDigrama Fusibles GMC t7500 2006ObedAlvaradoAún no hay calificaciones
- Aterramiento ElectricoDocumento8 páginasAterramiento ElectricoJaime Cors FlamburyAún no hay calificaciones
- 5 Clase - InestabilidadesDocumento46 páginas5 Clase - InestabilidadesvaleskaAún no hay calificaciones
- Informe I-Control AdaptativoDocumento21 páginasInforme I-Control AdaptativoNelson SepulvedaAún no hay calificaciones
- Análisis de Papeles y CartonesDocumento26 páginasAnálisis de Papeles y CartonesNatali Balboa0% (1)
- Informe de Sustentabilidad Grupo Elektra 2017 - ES PDFDocumento132 páginasInforme de Sustentabilidad Grupo Elektra 2017 - ES PDFLuisEnriquePimentelVillaAún no hay calificaciones
- Cruz Trejo Alicia NahomiDocumento7 páginasCruz Trejo Alicia NahomiJosue ValdezAún no hay calificaciones
- Requisitos CODIADocumento2 páginasRequisitos CODIAJonh TejadaAún no hay calificaciones
- Concepto de Proceso AdministrativoDocumento8 páginasConcepto de Proceso AdministrativoFernando Bautista100% (3)
- Worksheet 6 Testing Saber 11 EsDocumento11 páginasWorksheet 6 Testing Saber 11 EsSOFIA MOLANO PULIDOAún no hay calificaciones
- Zonas Climáticas Del Mund2Documento6 páginasZonas Climáticas Del Mund2Rony MolinaAún no hay calificaciones
- Fraude Masivo en Estudios Científicos en ChinaDocumento3 páginasFraude Masivo en Estudios Científicos en Chinajhony1523Aún no hay calificaciones
- Situación Actual de La Producción de Frutas y HortalizasDocumento6 páginasSituación Actual de La Producción de Frutas y HortalizasKatlyn RoblesAún no hay calificaciones
- FÍSICA - S12T - Hidrostática, HidrodinámicaDocumento3 páginasFÍSICA - S12T - Hidrostática, HidrodinámicaTreicy OjedaAún no hay calificaciones
- Res. 0557-2022 Prorroga Tit. 2022-159475 TacnaDocumento2 páginasRes. 0557-2022 Prorroga Tit. 2022-159475 TacnaJadailton Zambrano ArbietoAún no hay calificaciones
- Analisis Descriptivo-Vivir Su Vida-Godard 1962Documento12 páginasAnalisis Descriptivo-Vivir Su Vida-Godard 1962Orestes BalianAún no hay calificaciones
- Día de La Canción CriollaDocumento5 páginasDía de La Canción CriollaAntonio Benito QuispeAún no hay calificaciones
- Clase 5 Cabeza y CuelloDocumento11 páginasClase 5 Cabeza y CuelloCristobal Alexander Alcantara YañezAún no hay calificaciones
- 08 - Presentación Dirección 1 - AlcanceDocumento83 páginas08 - Presentación Dirección 1 - AlcanceALFAún no hay calificaciones
- Educacion VialDocumento51 páginasEducacion VialOscar OrtizAún no hay calificaciones
- Folleto Tipo Acordeón Tríptico Itinerario Vacaciones Scrapbook Beige y VerdeDocumento2 páginasFolleto Tipo Acordeón Tríptico Itinerario Vacaciones Scrapbook Beige y VerdeGiancarlo Salazar AguilarAún no hay calificaciones
- Planificación A Distancia Música 4ºA-BDocumento3 páginasPlanificación A Distancia Música 4ºA-BRomán FrománAún no hay calificaciones
- Prim. 3°-4° Ciclo IV Personal Social Sesión 10 14junioDocumento18 páginasPrim. 3°-4° Ciclo IV Personal Social Sesión 10 14junioValentina Tinta AimaAún no hay calificaciones
- Proyecto Cafe Terminado EnmarcadoDocumento7 páginasProyecto Cafe Terminado EnmarcadoGaby OrdoñezAún no hay calificaciones
- Forestaciones y Desarrollo Sanchez Acosta Peru 2016Documento130 páginasForestaciones y Desarrollo Sanchez Acosta Peru 2016martin sanchez acostaAún no hay calificaciones
- La Concentracion de TareasDocumento3 páginasLa Concentracion de TareasMaría Cecilia MoraisAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Cómo hacer aviones de papel y otros objetos voladoresDe EverandCómo hacer aviones de papel y otros objetos voladoresAún no hay calificaciones
- ¿Cómo piensan las máquinas?: Inteligencia artificial para humanosDe Everand¿Cómo piensan las máquinas?: Inteligencia artificial para humanosCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- La causa raiz de los accidentes: Historias de accidentes en la industriaDe EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaCalificación: 5 de 5 estrellas5/5 (1)
- Machine Learning y Deep Learning: Usando Python, Scikit y KerasDe EverandMachine Learning y Deep Learning: Usando Python, Scikit y KerasAún no hay calificaciones
- Comunicaciones industriales y WinCCDe EverandComunicaciones industriales y WinCCCalificación: 5 de 5 estrellas5/5 (4)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialCalificación: 4.5 de 5 estrellas4.5/5 (10)