También podría gustarte
- 6 BalancedscorecardDocumento10 páginas6 BalancedscorecardGenett Jimenez DelgadoAún no hay calificaciones
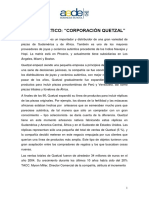
- Caso Práctico QuetzalDocumento4 páginasCaso Práctico QuetzalAnonymous 6Rc2bz0IIAún no hay calificaciones
- 3T, IND8-1 - Sensores I - PresentaciónDocumento48 páginas3T, IND8-1 - Sensores I - PresentaciónMarco LpcAún no hay calificaciones
- 6 BalancedscorecardDocumento10 páginas6 BalancedscorecardGenett Jimenez DelgadoAún no hay calificaciones
- Unidad 3 - POSICIONAMIENTO Y COORDINACION PDFDocumento39 páginasUnidad 3 - POSICIONAMIENTO Y COORDINACION PDFMarco LpcAún no hay calificaciones
- Presentación Iperc PDFDocumento50 páginasPresentación Iperc PDFAnonymous z1faZNUNAún no hay calificaciones
- 0 - Introduccion A La Automatizacion IndustrialDocumento12 páginas0 - Introduccion A La Automatizacion IndustrialMarco LpcAún no hay calificaciones
- Practica 6Documento2 páginasPractica 6Marco LpcAún no hay calificaciones
- EnsamblajeDocumento1 páginaEnsamblajeMarco LpcAún no hay calificaciones
- #Parcial2 (2018-01) - Modelamiento de ProcesosDocumento2 páginas#Parcial2 (2018-01) - Modelamiento de ProcesosMarco LpcAún no hay calificaciones
- 01a-Unid-Qui Ii-2016-2Documento173 páginas01a-Unid-Qui Ii-2016-2Marco LpcAún no hay calificaciones
- Problemas de Campo Electrico y Ley de GaussDocumento15 páginasProblemas de Campo Electrico y Ley de GaussMarco LpcAún no hay calificaciones
- Cultura CretenseDocumento10 páginasCultura CretenseMarco LpcAún no hay calificaciones
- Calculo Vectorial - Problemario (Una)Documento197 páginasCalculo Vectorial - Problemario (Una)Felice0% (1)
- Proyecto IntegradorDocumento4 páginasProyecto IntegradorJ Andres GonzalezAún no hay calificaciones
- Exposicion RedaccionDocumento16 páginasExposicion RedaccionJuan RomeroAún no hay calificaciones
- Análisis Del Libro Juventud en ExtasisDocumento18 páginasAnálisis Del Libro Juventud en ExtasisCesar SanchezAún no hay calificaciones
- Conclusiones Descriptivas y Niveles de Logro de Primaria - EducarPerúDocumento15 páginasConclusiones Descriptivas y Niveles de Logro de Primaria - EducarPerúMassiela ArandaAún no hay calificaciones
- AntibioticosDocumento3 páginasAntibioticosVictor VargasAún no hay calificaciones
- Informe 1. Introduccion A La UltrafiltracionDocumento12 páginasInforme 1. Introduccion A La UltrafiltracionGabriela CalzadillaAún no hay calificaciones
- Plan Operativo Anual Cbba-CercadoDocumento3 páginasPlan Operativo Anual Cbba-CercadoJavier RuedaAún no hay calificaciones
- Dilo de Otra Manera Utiliza Sinonimos: LeerDocumento1 páginaDilo de Otra Manera Utiliza Sinonimos: LeerTeddy CGAún no hay calificaciones
- Mega Rayquaza Shiny - Búsqueda de GoogleDocumento1 páginaMega Rayquaza Shiny - Búsqueda de GoogleJon Vilar GarciaAún no hay calificaciones
- Word Mecanica de Rocas NNNDocumento3 páginasWord Mecanica de Rocas NNNedwin castrejonAún no hay calificaciones
- Anexo 1. Sesión 1 Elaboración de Mezcla de Alimento (ALTERNA)Documento7 páginasAnexo 1. Sesión 1 Elaboración de Mezcla de Alimento (ALTERNA)Edinson Padilla PajaroAún no hay calificaciones
- Sintesis SabinasDocumento17 páginasSintesis SabinasAbraham Morales RmirezAún no hay calificaciones
- Taller 2 ÁLGEBRA LINEAL 2020-3Documento7 páginasTaller 2 ÁLGEBRA LINEAL 2020-3Juliana Posada33% (3)
- Microsoft Word - Notas - Control de MaquinasDocumento38 páginasMicrosoft Word - Notas - Control de MaquinasMarcela TorresAún no hay calificaciones
- 5.0 Plano de Intalaciones Electricas OkDocumento1 página5.0 Plano de Intalaciones Electricas OkCarlos Cojal AguilarAún no hay calificaciones
- CLASE #5 Mantenimiento Del Motor MonofasicoDocumento24 páginasCLASE #5 Mantenimiento Del Motor MonofasicojuanAún no hay calificaciones
- Solución de Mayas - ElectronicaDocumento4 páginasSolución de Mayas - Electronicaylt_837_816116960Aún no hay calificaciones
- Texto Biofisica para Primer ParcialDocumento82 páginasTexto Biofisica para Primer Parcialpark wimoAún no hay calificaciones
- Comprensión Lectora - El PeatónDocumento2 páginasComprensión Lectora - El PeatónCeci Caruso75% (8)
- Informe de Suelos, Pavimentos, Geotecnia Y CONCRETO #009-2023-ESPGC-JRGTDocumento7 páginasInforme de Suelos, Pavimentos, Geotecnia Y CONCRETO #009-2023-ESPGC-JRGTJhonathanRaulGarciaTapiaAún no hay calificaciones
- Instrumento de Evaluacion Wisc-VDocumento6 páginasInstrumento de Evaluacion Wisc-VDomeIglesiasAún no hay calificaciones
- Resumen 2Documento3 páginasResumen 2Abril Jacqueline Rodríguez RojasAún no hay calificaciones
- Cuadro ComparativoDocumento1 páginaCuadro Comparativokarlabonilla3030Aún no hay calificaciones
- Integral Definida Areas y Volumenes de Revolucion Metodos de DiscosDocumento32 páginasIntegral Definida Areas y Volumenes de Revolucion Metodos de DiscosRONALD ISAAC SILVA JUAREZAún no hay calificaciones
- EMPRESA - COMO - SISTEMA AbiertoDocumento13 páginasEMPRESA - COMO - SISTEMA AbiertoCarlos BenavidesAún no hay calificaciones
- Inverosimil PDFDocumento29 páginasInverosimil PDFLiliss LuMaAún no hay calificaciones
- Cuadro Comparativo de ParadigmasDocumento1 páginaCuadro Comparativo de ParadigmasAndy Ortega100% (1)
- Ficha 2 Matemática V-SantosDocumento14 páginasFicha 2 Matemática V-SantosSantos Huaman AyteAún no hay calificaciones
- 7 Gestión Del CostoDocumento11 páginas7 Gestión Del CostoAnonymous FeSflG2Tl100% (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Mensajes De Ángeles, Respira y Elévate en el amor Angelicar, Luz & CompasiónDe EverandMensajes De Ángeles, Respira y Elévate en el amor Angelicar, Luz & CompasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- La causa raiz de los accidentes: Historias de accidentes en la industriaDe EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaCalificación: 5 de 5 estrellas5/5 (1)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Inteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaDe EverandInteligencia artificial: Una exploración filosófica sobre el futuro de la mente y la concienciaAna Isabel Sánchez DíezCalificación: 4 de 5 estrellas4/5 (3)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialDe EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosDe EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosCalificación: 4 de 5 estrellas4/5 (1)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialCalificación: 4.5 de 5 estrellas4.5/5 (11)