También podría gustarte
- Sesion 9 A Levantamiento Modo RTKDocumento31 páginasSesion 9 A Levantamiento Modo RTKDiego Fernando Paredes SaldañaAún no hay calificaciones
- PTS 032 - para Maquinaria PesadaDocumento7 páginasPTS 032 - para Maquinaria Pesadaale sala60% (5)
- Gnss GpsDocumento71 páginasGnss GpsEnrique ChAún no hay calificaciones
- GpsDocumento25 páginasGpsCarle MontoyaAún no hay calificaciones
- Métodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308De EverandMétodos de trabajo y utilización de aparatos, equipos y útiles topográficos. AGAJ0308Aún no hay calificaciones
- GPS DiferencialDocumento12 páginasGPS DiferencialIsai Keoma Chirinos DiazAún no hay calificaciones
- Gps DiferencialDocumento12 páginasGps DiferencialJairo3000Aún no hay calificaciones
- GPSDocumento49 páginasGPSMe100% (2)
- Topografía Con GPS en Tiempo RealDocumento4 páginasTopografía Con GPS en Tiempo RealFrancis Roque RuizAún no hay calificaciones
- GPS TopografiaDocumento38 páginasGPS TopografiaLuis Rosanchez100% (1)
- GPSDocumento55 páginasGPSRoberto Lühr BarrosAún no hay calificaciones
- GPS Navegador: 1. La PosiciónDocumento7 páginasGPS Navegador: 1. La PosiciónKeyla LupucheAún no hay calificaciones
- Semana14 GPSDocumento23 páginasSemana14 GPScoaquirabrayan739Aún no hay calificaciones
- RTKDocumento5 páginasRTKvictor salas manriqueAún no hay calificaciones
- Topografía Con GPS en Tiempo RealDocumento3 páginasTopografía Con GPS en Tiempo RealRonald Millán GonzalesAún no hay calificaciones
- Practica 7Documento13 páginasPractica 7P Herminio SabinoAún no hay calificaciones
- GPSDocumento49 páginasGPSPercy LimaAún no hay calificaciones
- Luz Trabajo FinalDocumento7 páginasLuz Trabajo FinalMerymu AhumadaAún no hay calificaciones
- Método de Medición GNSS RTKDocumento32 páginasMétodo de Medición GNSS RTKShirleyPortalesCamposAún no hay calificaciones
- Chanc HulloDocumento2 páginasChanc HullogabrielaAún no hay calificaciones
- Gps DiferencialDocumento12 páginasGps DiferencialYerzydDavidAlconBustosAún no hay calificaciones
- Introducción Al GPSDocumento13 páginasIntroducción Al GPSAlexx NoriegaAún no hay calificaciones
- Marco Teorico GpsDocumento4 páginasMarco Teorico GpsSergio LievanoAún no hay calificaciones
- Sistema de Posicionamiento Global (GPS) : Descripción, Análisis de Errores, Aplicaciones Y FuturoDocumento8 páginasSistema de Posicionamiento Global (GPS) : Descripción, Análisis de Errores, Aplicaciones Y FuturoLuis salinasAún no hay calificaciones
- GPS RoverDocumento4 páginasGPS RoverAlexis ZorbaAún no hay calificaciones
- 02 Sesión 9.2 Levantamiento Modo RTKDocumento33 páginas02 Sesión 9.2 Levantamiento Modo RTKyenner lara advinculaAún no hay calificaciones
- Sistema de Posicionamiento Global (GPS) : Descripción, Análisis de Errores, Aplicaciones Y FuturoDocumento9 páginasSistema de Posicionamiento Global (GPS) : Descripción, Análisis de Errores, Aplicaciones Y FuturoRuth Esther Osquiza MendozaAún no hay calificaciones
- Tarea 10 de GeodesiaDocumento34 páginasTarea 10 de GeodesiaAlexander AlamoAún no hay calificaciones
- Resumen Semana 9-11-17Documento9 páginasResumen Semana 9-11-17Jhonnathan Lazo CarhuazAún no hay calificaciones
- Funcionamiento de Un GPSDocumento6 páginasFuncionamiento de Un GPSMelissa Loxa RojasAún no hay calificaciones
- Practica 7Documento13 páginasPractica 7P Herminio SabinoAún no hay calificaciones
- Realizar Un Ensayo de 3000 A 3500 Palabras SobreDocumento10 páginasRealizar Un Ensayo de 3000 A 3500 Palabras SobreBelèn BurbanoAún no hay calificaciones
- GPS - Final (Autoguardado)Documento30 páginasGPS - Final (Autoguardado)Gregory Barcia QuindeAún no hay calificaciones
- P07 TOPO I 2014 V C4 Delgado Huanaco Alvaro INFORMEDocumento13 páginasP07 TOPO I 2014 V C4 Delgado Huanaco Alvaro INFORMESergio Ascencios AguilarAún no hay calificaciones
- Receptores TopograficosDocumento6 páginasReceptores TopograficosOMAR ALONSO MEDINA PACHECOAún no hay calificaciones
- Métodos en Tiempo RealDocumento4 páginasMétodos en Tiempo RealanthonyAún no hay calificaciones
- Informe GPSDocumento9 páginasInforme GPSFernando Escalante DiazAún no hay calificaciones
- GPS DiferencialesDocumento34 páginasGPS DiferencialesJenner Davis Ugaz RoaAún no hay calificaciones
- Tarea.04. Lectura - El.gpsDocumento8 páginasTarea.04. Lectura - El.gpsMelissa Barturen DiazAún no hay calificaciones
- Glosario Gps Mecinca Topografia GpsDocumento26 páginasGlosario Gps Mecinca Topografia GpsFrank AcarapiAún no hay calificaciones
- Sistema de Posicionamiento GlobalDocumento15 páginasSistema de Posicionamiento GlobalKAREN JHOSET CHIPANA MAMANIAún no hay calificaciones
- Geodesia Tarea 3Documento7 páginasGeodesia Tarea 3Yisaury Ortiz100% (1)
- Correccion DiferencialDocumento3 páginasCorreccion DiferencialEuclides BarandicaAún no hay calificaciones
- Ingeniería Civil: Levantamiento Topografico Con GpsDocumento8 páginasIngeniería Civil: Levantamiento Topografico Con GpsAguirre Lopez Juan ManuelAún no hay calificaciones
- Exposición Sistemas Globales de Navegación Satélite (GNSS)Documento36 páginasExposición Sistemas Globales de Navegación Satélite (GNSS)Rolando DazaAún no hay calificaciones
- Clase 19Documento18 páginasClase 19antony cristian alvarado hurtadoAún no hay calificaciones
- Que Es El Sistema GPS ?: Posicionamiento AutónomoDocumento3 páginasQue Es El Sistema GPS ?: Posicionamiento Autónomodas001Aún no hay calificaciones
- Semana 1.4 GNSSDocumento13 páginasSemana 1.4 GNSSCesar Mamani RomeroAún no hay calificaciones
- Aplicaciones Topograficas Del GPS: "Sistema de Posicionamiento Global"Documento54 páginasAplicaciones Topograficas Del GPS: "Sistema de Posicionamiento Global"Fredy Chumioque UcedaAún no hay calificaciones
- Técnicas de Medición Con GPSDocumento25 páginasTécnicas de Medición Con GPSMarco ZAPATA PEREZAún no hay calificaciones
- A. Segmento EspacialDocumento5 páginasA. Segmento EspacialAxel FloresAún no hay calificaciones
- RESUMENDocumento16 páginasRESUMENangel sabandoAún no hay calificaciones
- Métodos para Realizar Levantamientos Geodésicos Con Receptores GNSSDocumento3 páginasMétodos para Realizar Levantamientos Geodésicos Con Receptores GNSSRodolfoDiazAún no hay calificaciones
- Metodos de ObservacionDocumento47 páginasMetodos de Observacionreiker20Aún no hay calificaciones
- Capacitacion GPS-RTK AyyDocumento38 páginasCapacitacion GPS-RTK AyyHoracio PachecoAún no hay calificaciones
- 4 Levantamiento SatelitalDocumento40 páginas4 Levantamiento SatelitalGiulianna FloresAún no hay calificaciones
- Tarea 1Documento6 páginasTarea 1Andrixson Gabriel Maldonado ArroyoAún no hay calificaciones
- Levantamiento Con GPSDocumento15 páginasLevantamiento Con GPSFRANKLIN REMY FARIAS NOLEAún no hay calificaciones
- Gps DiferencialDocumento10 páginasGps DiferencialbryanAún no hay calificaciones
- Geomatica ProyectoDocumento6 páginasGeomatica ProyectoNicole PorcayoAún no hay calificaciones
- Reconocimiento automático de objetivos: Avances en técnicas de visión por computadora para el reconocimiento de objetivosDe EverandReconocimiento automático de objetivos: Avances en técnicas de visión por computadora para el reconocimiento de objetivosAún no hay calificaciones
- Evaluacion de Vivienda - Parte 1Documento21 páginasEvaluacion de Vivienda - Parte 1Yourlin Yanapa CHAún no hay calificaciones
- TRIPTICO CementoDocumento2 páginasTRIPTICO CementoYourlin Yanapa CHAún no hay calificaciones
- TRIPTICO YesoDocumento2 páginasTRIPTICO YesoYourlin Yanapa CHAún no hay calificaciones
- TRIPTICO YesoDocumento2 páginasTRIPTICO YesoYourlin Yanapa CHAún no hay calificaciones
- Investigacion de Ch'ampaDocumento105 páginasInvestigacion de Ch'ampaYourlin Yanapa CHAún no hay calificaciones
- PolimerosDocumento17 páginasPolimerosYourlin Yanapa CHAún no hay calificaciones
- Curso Materiales de La Construcción Tema Cal Docente: Ing. Yasmani Teofilo, Vitulas Quille NombresDocumento41 páginasCurso Materiales de La Construcción Tema Cal Docente: Ing. Yasmani Teofilo, Vitulas Quille NombresYourlin Yanapa CHAún no hay calificaciones
- Tuberia para Exponer MATERIALESDocumento85 páginasTuberia para Exponer MATERIALESYourlin Yanapa CHAún no hay calificaciones
- Curso Materiales de La Construcción Tema Cal Docente: Ing. Yasmani Teofilo, Vitulas Quille NombresDocumento41 páginasCurso Materiales de La Construcción Tema Cal Docente: Ing. Yasmani Teofilo, Vitulas Quille NombresYourlin Yanapa CHAún no hay calificaciones
- Clasificación de Los MaterialesDocumento6 páginasClasificación de Los MaterialesYourlin Yanapa CHAún no hay calificaciones
- CPTDocumento14 páginasCPTYourlin Yanapa CHAún no hay calificaciones
- Amplificador de Potencia D200 Clase-D para Audio DIY - Circuito ElectrónicoDocumento3 páginasAmplificador de Potencia D200 Clase-D para Audio DIY - Circuito ElectrónicoOlger Quintero Tapia0% (1)
- Análisis Crítico de Los MediosDocumento5 páginasAnálisis Crítico de Los MediosLuifer VillasmilAún no hay calificaciones
- Problemas ResueltosDocumento100 páginasProblemas ResueltosJOSE LEIDER BAZURTO PARRAAún no hay calificaciones
- Lineas de Transmision Semana 4Documento33 páginasLineas de Transmision Semana 4jef floresAún no hay calificaciones
- Capítulo 4. Restricción y Eliminación de Obstáculos: Página 1Documento57 páginasCapítulo 4. Restricción y Eliminación de Obstáculos: Página 1Alejandro TorresAún no hay calificaciones
- Ups ST002845Documento112 páginasUps ST002845Juan AguilarAún no hay calificaciones
- Modulador 8-QAM: Cos (WT) +B Sin (WT)Documento3 páginasModulador 8-QAM: Cos (WT) +B Sin (WT)Ivan RamosAún no hay calificaciones
- Electromagnetismo en La GeneticaDocumento14 páginasElectromagnetismo en La GeneticaYadira YajairaAún no hay calificaciones
- Espectro Magnetico y ElectromagnetismoDocumento11 páginasEspectro Magnetico y ElectromagnetismoRoberth SanchezAún no hay calificaciones
- Planificación Del EnlaceDocumento3 páginasPlanificación Del EnlaceRogerOkañhaDieztraAún no hay calificaciones
- Tesina Prótesis MioeléctricaDocumento100 páginasTesina Prótesis MioeléctricaAlan Daniel Alvarez CastroAún no hay calificaciones
- PPC-05 Comunidades NativasDocumento1 páginaPPC-05 Comunidades NativasJorge Luis Barrionuevo FloresAún no hay calificaciones
- REPETIDORESDocumento8 páginasREPETIDORESLuis Bhetto Tito MendozaAún no hay calificaciones
- Fuentes de Error GPSDocumento6 páginasFuentes de Error GPSEuller Rodríguez100% (1)
- Sc70 Sc130 Spanish Operations ManualDocumento135 páginasSc70 Sc130 Spanish Operations Manualtony xAún no hay calificaciones
- Sistemas de RadarDocumento5 páginasSistemas de RadarEstefanía Vega GonzálezAún no hay calificaciones
- Feedback Clientes - Del 02 Al 08 Octubre 2023Documento2 páginasFeedback Clientes - Del 02 Al 08 Octubre 2023GabrielAún no hay calificaciones
- IC-R20 Esp Brochure PDFDocumento2 páginasIC-R20 Esp Brochure PDFFabio MuñozAún no hay calificaciones
- Categorias Utp, Semana 9Documento6 páginasCategorias Utp, Semana 9Nathaly BermelloAún no hay calificaciones
- S01.s1 - Circuitos de Radio y Alta FrecuenciaDocumento38 páginasS01.s1 - Circuitos de Radio y Alta FrecuenciaSteve NuñezAún no hay calificaciones
- Álvaro MorteDocumento3 páginasÁlvaro MorteGabriel GarcíaAún no hay calificaciones
- Cotizacion FajaDocumento2 páginasCotizacion FajaEdwin BardalesAún no hay calificaciones
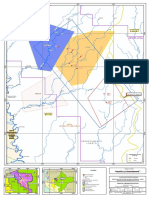
- 02 - Plano Puntos de Control TopograficoDocumento1 página02 - Plano Puntos de Control TopograficoRicardo Marquez MorenoAún no hay calificaciones
- Diagrama de Sistema de RiegoDocumento2 páginasDiagrama de Sistema de RiegoMario GonzalezAún no hay calificaciones
- Despertador MX-RRD6212Documento9 páginasDespertador MX-RRD6212Rafael Quintero SevillaAún no hay calificaciones
- Wa0010.Documento1 páginaWa0010.MINECRAFT JAVAAún no hay calificaciones
- 14 MGO Capitulo 8Documento86 páginas14 MGO Capitulo 8David Gonzalez SeoaneAún no hay calificaciones
- Nomina OctavosDocumento3 páginasNomina Octavosc.quijadaAún no hay calificaciones