También podría gustarte
- P09 Interface I2C PIC18FDocumento7 páginasP09 Interface I2C PIC18FOscar A. PomaAún no hay calificaciones
- Interfaz Simple Compatible Esteca55 Versión 1Documento7 páginasInterfaz Simple Compatible Esteca55 Versión 1Erick Limon MontecinosAún no hay calificaciones
- Pic DimmerDocumento8 páginasPic Dimmeranon-119611100% (4)
- Derivados Del 8051Documento7 páginasDerivados Del 8051Wilson YnoaAún no hay calificaciones
- Manual Memorias EpromDocumento4 páginasManual Memorias Epromجون أندروAún no hay calificaciones
- Instrucciones en Un MicrocontroladorDocumento58 páginasInstrucciones en Un MicrocontroladorSummer RamirezAún no hay calificaciones
- PLL - Diseño Con 4046Documento13 páginasPLL - Diseño Con 4046José PerezAún no hay calificaciones
- BalunDocumento2 páginasBalunLuz Maria PenagosAún no hay calificaciones
- Termostato ElectrónicoDocumento3 páginasTermostato ElectrónicoDownloadfree VeryfreeAún no hay calificaciones
- Trabajo Circuitos AndresDocumento15 páginasTrabajo Circuitos Andresesteban morenoAún no hay calificaciones
- Práctica No.3 Contador 74LS193Documento7 páginasPráctica No.3 Contador 74LS193Eelizaabeth ChireAún no hay calificaciones
- Entendiendo Una Fuente ATXDocumento18 páginasEntendiendo Una Fuente ATXdp500Aún no hay calificaciones
- Convertidor DC-DCDocumento11 páginasConvertidor DC-DCalfredo verdeciaAún no hay calificaciones
- Capacimetro Con Pic16f877aDocumento17 páginasCapacimetro Con Pic16f877aAns Shel Cardenas YllanesAún no hay calificaciones
- Mont-Intercom Via Red PDFDocumento5 páginasMont-Intercom Via Red PDFLorena GaitanAún no hay calificaciones
- Todos Los TransistoresDocumento4 páginasTodos Los TransistoresEnrique GuzmánAún no hay calificaciones
- Mosfet D Amplificador 2N7000Documento8 páginasMosfet D Amplificador 2N7000Julian Andres VictoriaAún no hay calificaciones
- Los Reguladores de TensiónDocumento5 páginasLos Reguladores de TensiónJ Billy Dkit100% (1)
- Fuentes Varibles para ProyectoDocumento2 páginasFuentes Varibles para ProyectoHenry MarinAún no hay calificaciones
- Punto QDocumento2 páginasPunto QAndres HurtadoAún no hay calificaciones
- Transmisor de FM de 18w-ItaDocumento3 páginasTransmisor de FM de 18w-Itahayshare100% (1)
- Fuente de Alimentación DigitalDocumento21 páginasFuente de Alimentación DigitalHectorLopezAún no hay calificaciones
- Funcionamiento OZ9938Documento2 páginasFuncionamiento OZ9938miguel angel jaramilloAún no hay calificaciones
- Quemador de PicSDocumento8 páginasQuemador de PicSRicardo RoseroAún no hay calificaciones
- Cabina ActivaDocumento9 páginasCabina ActivaRobert RmzAún no hay calificaciones
- Códigos de TransistoresDocumento3 páginasCódigos de TransistoresAnonymous 8bbVmLtQ100% (1)
- Transistores de Conmutación, Módulos Inteligentes, y DriversDocumento58 páginasTransistores de Conmutación, Módulos Inteligentes, y DriversSantiago OrtizAún no hay calificaciones
- Tema 6 Teclado Digital DecimalDocumento4 páginasTema 6 Teclado Digital Decimal2mercedesAún no hay calificaciones
- Informe TransistorDocumento9 páginasInforme TransistorJohnAún no hay calificaciones
- Registro Intcon 12F675Documento1 páginaRegistro Intcon 12F675Jorge AlviarezAún no hay calificaciones
- Como Hacer Un Regulador de Corriente Sin Variar La TensionDocumento10 páginasComo Hacer Un Regulador de Corriente Sin Variar La Tensionjose12391Aún no hay calificaciones
- Libro PICDocumento469 páginasLibro PICLeonel GzzAún no hay calificaciones
- Configuración de Los Fuses MicrochipDocumento6 páginasConfiguración de Los Fuses MicrochipjdamianAún no hay calificaciones
- Manual+PIC+18F4550 Desbloqueado PDFDocumento224 páginasManual+PIC+18F4550 Desbloqueado PDFkass_96Aún no hay calificaciones
- Luces Tipo PoliciaDocumento5 páginasLuces Tipo PoliciaVictor Raul Osnayo MamaniAún no hay calificaciones
- Informe Fuente de CorrienteDocumento8 páginasInforme Fuente de CorrienteHaider Navarro100% (2)
- Funcion de Un LEDDocumento2 páginasFuncion de Un LEDRoberto VásquezAún no hay calificaciones
- Puertos de Entrada y SalidaDocumento55 páginasPuertos de Entrada y SalidaJuanfer PCAún no hay calificaciones
- Indicador de Secuencia Trifasica 2 PDFDocumento1 páginaIndicador de Secuencia Trifasica 2 PDFkevin tango100% (1)
- Configuracion Del Pic 12f629Documento9 páginasConfiguracion Del Pic 12f629Jorge PalaciosAún no hay calificaciones
- Pic12f629 675Documento53 páginasPic12f629 675Moises MAún no hay calificaciones
- Display 7 Segmentos, LCD y Teclado Sistema de SeguridadDocumento12 páginasDisplay 7 Segmentos, LCD y Teclado Sistema de SeguridadMarco A RichterAún no hay calificaciones
- Amplificador de RF para FM de 70wDocumento2 páginasAmplificador de RF para FM de 70wHenry Jose Larez Rojas100% (1)
- El Circuito Integrado TA7291S Es Un Driver Tipo Puente Con Control de VoltajemotoressDocumento6 páginasEl Circuito Integrado TA7291S Es Un Driver Tipo Puente Con Control de VoltajemotoressDavid Medina100% (1)
- Convertidores VF FVDocumento5 páginasConvertidores VF FVdavix2911Aún no hay calificaciones
- AmplificadorDocumento2 páginasAmplificadorJose ChaconAún no hay calificaciones
- Resumen Del Procesador DLXDocumento4 páginasResumen Del Procesador DLXPedro AntonAún no hay calificaciones
- Transistor BJT EjerciciosDocumento21 páginasTransistor BJT EjerciciosManuel AbrahamAún no hay calificaciones
- 8 - Modulo MSSP y Otros MicrocontroladoresDocumento52 páginas8 - Modulo MSSP y Otros MicrocontroladoresAndres Castro VacaAún no hay calificaciones
- Manual de Adaptacion de ICs Moduladores en Fuentes SMPSDocumento6 páginasManual de Adaptacion de ICs Moduladores en Fuentes SMPSRamiro Gonzalez M.100% (1)
- PicBasic PRO CompilerDocumento122 páginasPicBasic PRO CompilerFernando RamirezAún no hay calificaciones
- Como Construir Una Bobina para RFDocumento5 páginasComo Construir Una Bobina para RFjuan ramos ruizAún no hay calificaciones
- Funcionamiento OZ9938Documento4 páginasFuncionamiento OZ9938FABRI311Aún no hay calificaciones
- Modulo Adc Atmega8Documento21 páginasModulo Adc Atmega8Rafael RamoscordovaAún no hay calificaciones
- Fuente Regulada VariableDocumento15 páginasFuente Regulada VariableFreddy Chavez VallejosAún no hay calificaciones
- Material Fr4Documento4 páginasMaterial Fr4Carlos Merckx OlarteAún no hay calificaciones
- Conversor Digital Analógico ComercialDocumento1 páginaConversor Digital Analógico ComercialWendyAún no hay calificaciones
- I 2 CDocumento19 páginasI 2 CkennyfernandezAún no hay calificaciones
- Comunicación I2C PDFDocumento22 páginasComunicación I2C PDFNoe Minga CalderonAún no hay calificaciones
- 05 I2cDocumento34 páginas05 I2cBRAYAN GABRIEL GIRON GARCIAAún no hay calificaciones
- Reloj Con DS1307 y PIC 18f877Documento9 páginasReloj Con DS1307 y PIC 18f877rullitoAún no hay calificaciones
- Lenguaje C ResumenDocumento69 páginasLenguaje C ResumenrullitoAún no hay calificaciones
- Curso Intoductorio de PortuguésDocumento103 páginasCurso Intoductorio de PortuguésrullitoAún no hay calificaciones
- Lista de Materiales p.s2Documento1 páginaLista de Materiales p.s2rullitoAún no hay calificaciones
- Toc 0683 04 01Documento41 páginasToc 0683 04 01davidduranpolancoAún no hay calificaciones
- Lenguaje C, Teoría y PrácticaDocumento511 páginasLenguaje C, Teoría y Prácticarodri2507100% (2)
- Configuracion ICPROGDocumento1 páginaConfiguracion ICPROGrullitoAún no hay calificaciones
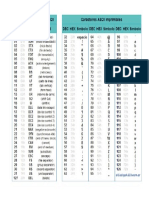
- Codigo Ascii en HexadecimalDocumento1 páginaCodigo Ascii en HexadecimalrullitoAún no hay calificaciones
- Practica Califacada ControlDocumento1 páginaPractica Califacada ControlrullitoAún no hay calificaciones
- TC9 Acciones ControlDocumento16 páginasTC9 Acciones ControlMiguel SolisAún no hay calificaciones
- Separatas Ingenieria de Control 4Documento32 páginasSeparatas Ingenieria de Control 4rullitoAún no hay calificaciones
- Isd PDFDocumento106 páginasIsd PDFrullitoAún no hay calificaciones
- El Combate de AngamosDocumento2 páginasEl Combate de AngamosrullitoAún no hay calificaciones
- Unidad1y2 SISTEMAS DINAMICOSDocumento69 páginasUnidad1y2 SISTEMAS DINAMICOSLismar CarolinaAún no hay calificaciones
- Memoria RELOJ-ISDDocumento13 páginasMemoria RELOJ-ISDmartincarrascoAún no hay calificaciones
- Librerias Lenguaje CDocumento38 páginasLibrerias Lenguaje CrullitoAún no hay calificaciones
- Timer InterrupcionesDocumento14 páginasTimer Interrupcionesnestor4485Aún no hay calificaciones
- El Combate de AngamosDocumento2 páginasEl Combate de AngamosrullitoAún no hay calificaciones
- Apendice CDocumento3 páginasApendice CrullitoAún no hay calificaciones
- Revista Microcontrol #7Documento64 páginasRevista Microcontrol #7Nando75% (4)
- Lenguaje C Entrada y SalidaDocumento4 páginasLenguaje C Entrada y SalidarullitoAún no hay calificaciones
- 09 ArreglosDocumento23 páginas09 ArreglosAngel Gregorio LezamaAún no hay calificaciones
- Lenguaje C Entrada y SalidaDocumento4 páginasLenguaje C Entrada y SalidarullitoAún no hay calificaciones
- Curso Intoductorio de PortuguésDocumento109 páginasCurso Intoductorio de PortuguésrullitoAún no hay calificaciones
- Manuel de Internet SanoDocumento101 páginasManuel de Internet SanorullitoAún no hay calificaciones
- Reglas de Controles Pes2019Documento2 páginasReglas de Controles Pes2019rullitoAún no hay calificaciones
- Uso de IsdDocumento66 páginasUso de IsdrullitoAún no hay calificaciones
- Libropic CarlosDocumento193 páginasLibropic CarlosLazaro Raul Sanchez Castañeda33% (3)
- Vumetro de 12 LEDDocumento2 páginasVumetro de 12 LEDrullitoAún no hay calificaciones
- Luz Zarate Tarea Control Semana3Documento7 páginasLuz Zarate Tarea Control Semana3PatriciaZarateCarrascoAún no hay calificaciones
- Geometría 2022Documento16 páginasGeometría 2022angeles riveroAún no hay calificaciones
- Cinta de EmbalajeDocumento4 páginasCinta de EmbalajeAlberto Varela MtzAún no hay calificaciones
- Diapositivas de Quimica InorganicaDocumento30 páginasDiapositivas de Quimica InorganicaFabiola MedinaAún no hay calificaciones
- Apuntes 234 1.2Documento8 páginasApuntes 234 1.2Javi RomoAún no hay calificaciones
- Máquina de VaporDocumento10 páginasMáquina de Vaporgibran jhAún no hay calificaciones
- Equilibrio Químico. KC y KP: 1.-La Constante de Equilibrio KDocumento2 páginasEquilibrio Químico. KC y KP: 1.-La Constante de Equilibrio KLuis Mario 607 Vasquez RomeroAún no hay calificaciones
- Registro ObservacionalDocumento20 páginasRegistro ObservacionalPatyto D Zepu100% (3)
- 5to y 6yo TALENTOSDocumento6 páginas5to y 6yo TALENTOSguillermo henrryAún no hay calificaciones
- Tareacolaborativaderepartoproporcional PDFDocumento3 páginasTareacolaborativaderepartoproporcional PDFpaola pinillos58% (12)
- Matemáticas para Los Negocios - Semana 3 - PDocumento8 páginasMatemáticas para Los Negocios - Semana 3 - PBelén IbarraAún no hay calificaciones
- Informe REPLANTEODocumento12 páginasInforme REPLANTEOFanny Leidy Choque Marquez100% (1)
- Unidad 2 ProbabiidadesDocumento62 páginasUnidad 2 ProbabiidadesJavierAún no hay calificaciones
- 3ER EXAMEN PARCIAL 2020-I TunelDocumento4 páginas3ER EXAMEN PARCIAL 2020-I TunelJULIO CESAR BARRIENTOS CUCHOAún no hay calificaciones
- Pointt 4Documento25 páginasPointt 4Harold PlazaAún no hay calificaciones
- La Oración Es La Unidad de Expresión en El IdiomaDocumento6 páginasLa Oración Es La Unidad de Expresión en El IdiomaMoasibeaAún no hay calificaciones
- Taller 3 - Simulación MontecarloDocumento2 páginasTaller 3 - Simulación MontecarloApuestas Julano0% (1)
- Ambiente de Trabajo5.Documento33 páginasAmbiente de Trabajo5.alejandroAún no hay calificaciones
- Revista MotoresDocumento9 páginasRevista MotoresAilyn PazAún no hay calificaciones
- Afiche Mate 4Documento1 páginaAfiche Mate 4Alejandra AlisterAún no hay calificaciones
- Pruebas y Mediciones, Eléctrónica Básica PDFDocumento33 páginasPruebas y Mediciones, Eléctrónica Básica PDFJorge CárdenasAún no hay calificaciones
- Practica 3 LlinealidadDocumento10 páginasPractica 3 LlinealidadGutslutAún no hay calificaciones
- Word ArtDocumento1 páginaWord ArtMarlingRosalesPradoAún no hay calificaciones
- Saiza Jose Carlos Ecuaciones CuadraticasDocumento3 páginasSaiza Jose Carlos Ecuaciones Cuadraticasjacinto solisAún no hay calificaciones
- Soluciones QuimicasDocumento48 páginasSoluciones QuimicasDaysi Taborda RamírezAún no hay calificaciones
- Curriculo de FinancieraDocumento4 páginasCurriculo de FinancieraFrancisco VasquezAún no hay calificaciones
- Sistema BinarioDocumento15 páginasSistema BinarioGOKU VILLEGASAún no hay calificaciones
- Manual 2020 Circuitos y Dispositivos Electrónicos (2611)Documento128 páginasManual 2020 Circuitos y Dispositivos Electrónicos (2611)Miguel Angel Llanos TuctoAún no hay calificaciones
- PDF Proyecto Sambor - CompressDocumento42 páginasPDF Proyecto Sambor - CompressRusbel Quino HuamanAún no hay calificaciones
- Construccion Del UniversoDocumento131 páginasConstruccion Del UniversoNatalia PorroAún no hay calificaciones