También podría gustarte
- Taller 1 Estados Financieros 2021-2 - Ejercicio 2Documento13 páginasTaller 1 Estados Financieros 2021-2 - Ejercicio 2Fabiana GonzálezAún no hay calificaciones
- Taller de Repaso Dinámica FinalDocumento2 páginasTaller de Repaso Dinámica FinalFabiana GonzálezAún no hay calificaciones
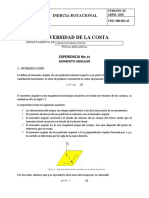
- Experiencia Virtual No. 13 - MOMENTO ANGULARDocumento9 páginasExperiencia Virtual No. 13 - MOMENTO ANGULARFabiana GonzálezAún no hay calificaciones
- Calculos ImpactoDocumento6 páginasCalculos ImpactoFabiana GonzálezAún no hay calificaciones
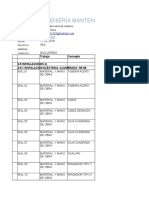
- Cantidades de Obra para Ampliacion - Enel - 13!07!2021Documento31 páginasCantidades de Obra para Ampliacion - Enel - 13!07!2021Fabiana GonzálezAún no hay calificaciones
- Puntaje MatemáticasDocumento11.622 páginasPuntaje MatemáticasFabiana GonzálezAún no hay calificaciones
- Dureza de Los MaterialesDocumento6 páginasDureza de Los MaterialesFabiana GonzálezAún no hay calificaciones
- Experiencia 2, Física MecánicaDocumento13 páginasExperiencia 2, Física MecánicaFabiana GonzálezAún no hay calificaciones
- Informe Tercera Ley de NewtonDocumento4 páginasInforme Tercera Ley de NewtonFabiana GonzálezAún no hay calificaciones
- Exposicion EcosistemasDocumento8 páginasExposicion EcosistemasFabiana GonzálezAún no hay calificaciones
- Una Cultura Que Derrama SangreDocumento3 páginasUna Cultura Que Derrama SangreFabiana GonzálezAún no hay calificaciones
- Taller InvestigativoDocumento13 páginasTaller InvestigativoFabiana GonzálezAún no hay calificaciones
- El Artículo de OpiniónDocumento1 páginaEl Artículo de OpiniónFabiana GonzálezAún no hay calificaciones
- Taller 1.1 Minerales PDFDocumento1 páginaTaller 1.1 Minerales PDFAntonio José BarcelóAún no hay calificaciones
- Plantilla para Propuesta de Transformacio - NDocumento1 páginaPlantilla para Propuesta de Transformacio - NFabiana GonzálezAún no hay calificaciones
- ANGULARDocumento18 páginasANGULARFabiana GonzálezAún no hay calificaciones
- Ejercicios Leyes de NDocumento9 páginasEjercicios Leyes de NFabiana GonzálezAún no hay calificaciones
- Experiencia 8 Virtual Tercera Ley de NewtonDocumento3 páginasExperiencia 8 Virtual Tercera Ley de NewtonFabiana GonzálezAún no hay calificaciones
- Proyecto DiseñoDocumento5 páginasProyecto DiseñoFabiana GonzálezAún no hay calificaciones
- Una Cultura Que Derrama SangreDocumento3 páginasUna Cultura Que Derrama SangreFabiana GonzálezAún no hay calificaciones
- Calculo Actividades Corte 2Documento2 páginasCalculo Actividades Corte 2Fabiana GonzálezAún no hay calificaciones
- Kodak GdiDocumento1 páginaKodak GdiFabiana GonzálezAún no hay calificaciones
- Rúbrica Del 20 Por Ciento Unidad III 2020Documento2 páginasRúbrica Del 20 Por Ciento Unidad III 2020Fabiana GonzálezAún no hay calificaciones
- VECTORESDocumento6 páginasVECTORESFabiana GonzálezAún no hay calificaciones
- Experiencia No 1Documento1 páginaExperiencia No 1Fabiana GonzálezAún no hay calificaciones
- ANGULARDocumento18 páginasANGULARFabiana GonzálezAún no hay calificaciones
- Trabajo ParcialDocumento5 páginasTrabajo ParcialFabiana GonzálezAún no hay calificaciones
- Matriz Revision BibliograficaDocumento56 páginasMatriz Revision BibliograficaFabiana GonzálezAún no hay calificaciones
- Columna de OpinionDocumento2 páginasColumna de OpinionFabiana GonzálezAún no hay calificaciones
- Movimientos Verticales 0607Documento7 páginasMovimientos Verticales 0607Jose86% (7)
- Problemario DinamicaDocumento13 páginasProblemario DinamicaDavid Perez HernandezAún no hay calificaciones
- C 29 C 29M - 97 TraducidaDocumento7 páginasC 29 C 29M - 97 TraducidaRoger Ernesto Cerna PeraltaAún no hay calificaciones
- Laboratorio Fisica 1Documento8 páginasLaboratorio Fisica 1Kevin LopezAún no hay calificaciones
- Quintas Olimpiadas de Física y Matemáticas Solucionario Nivel IiDocumento11 páginasQuintas Olimpiadas de Física y Matemáticas Solucionario Nivel IiDaniel Trujillo LedezmaAún no hay calificaciones
- Practica 1 de Labo de Fisica IIIDocumento6 páginasPractica 1 de Labo de Fisica IIIHenry Huayta ayaviriAún no hay calificaciones
- Caida Libre #5Documento5 páginasCaida Libre #5Anibal Enrique Rodríguez GonzalezAún no hay calificaciones
- Presupuesto OhlDocumento30 páginasPresupuesto OhlCarlosAguilarAún no hay calificaciones
- Cta3 U1-Sesion1Documento12 páginasCta3 U1-Sesion1MarleneAriasOrmeñoAún no hay calificaciones
- 2018a Examen FinalDocumento1 página2018a Examen FinalFrank Ortiz DominguezAún no hay calificaciones
- Trabajo 2 Física 2 (Laboratorio) - Eurel Mamani y Solis RomeroDocumento7 páginasTrabajo 2 Física 2 (Laboratorio) - Eurel Mamani y Solis RomeroMartin Quiroz PalaciosAún no hay calificaciones
- Calculo de La Aceleracion Con Derivadas PDFDocumento2 páginasCalculo de La Aceleracion Con Derivadas PDFElmer Bernabé BRICEÑO GALARRETAAún no hay calificaciones
- Clase 02-03 - 2018Documento4 páginasClase 02-03 - 2018minastirAún no hay calificaciones
- LinelizacionDocumento7 páginasLinelizacionOgata Katsuhiko Ogata OgataAún no hay calificaciones
- Movimiento Circular de Un Cuerpo en Un Plano VerticalDocumento5 páginasMovimiento Circular de Un Cuerpo en Un Plano Verticaleberth limache0% (1)
- Clase 1 - Física PDFDocumento38 páginasClase 1 - Física PDFJOHN ALEXANDER GAITAN PALENCIAAún no hay calificaciones
- Sem12 (A) Ley Gauss - Potencial EléctricoDocumento9 páginasSem12 (A) Ley Gauss - Potencial EléctricoKROSKIDOCAún no hay calificaciones
- Impacto ResumenEjercicios EQUIPO2 T4EDocumento6 páginasImpacto ResumenEjercicios EQUIPO2 T4EJudas Toledo CotaAún no hay calificaciones
- Taller Fisica 1,2Documento13 páginasTaller Fisica 1,2Maria Ester Aguilar GarciaAún no hay calificaciones
- LABORATORIO DE FI SICA 2 CALOR Y ONDAS Version 1 PDFDocumento113 páginasLABORATORIO DE FI SICA 2 CALOR Y ONDAS Version 1 PDFChristian David Garavito ChAún no hay calificaciones
- Práctica 5Documento7 páginasPráctica 5EDISSON ANDRES VILLA AVILAAún no hay calificaciones
- Movimiento CircularDocumento20 páginasMovimiento CircularJavier Lopez100% (1)
- Taller Analisis de CircuitosDocumento6 páginasTaller Analisis de CircuitosjesusAún no hay calificaciones
- Campo ElectricoDocumento4 páginasCampo ElectricoJorge CastilloAún no hay calificaciones
- Discusion IiDocumento20 páginasDiscusion Iishophya67% (3)
- AsdfghjklñDocumento8 páginasAsdfghjklñJosef Walter SosaAún no hay calificaciones
- Resumen Fisico QuimicaDocumento9 páginasResumen Fisico QuimicaJimena RomeroAún no hay calificaciones
- Trabajo de Fisica 2Documento19 páginasTrabajo de Fisica 2Jaki Hurtado HuallpaAún no hay calificaciones
- Fundamento Conceptual - Fuerzas.paralelas - En.equilibrio - Montoya Alejandro.P4Documento5 páginasFundamento Conceptual - Fuerzas.paralelas - En.equilibrio - Montoya Alejandro.P4Sammyr MontoyaAún no hay calificaciones