También podría gustarte
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Laboratori Od Is 5Documento3 páginasLaboratori Od Is 5IvanAún no hay calificaciones
- Practica de Laboratorio 8Documento12 páginasPractica de Laboratorio 8Jaiyim villalobosAún no hay calificaciones
- Borrador 3 PenduloDocumento14 páginasBorrador 3 PenduloManuel Blanco MendozaAún no hay calificaciones
- Robot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Documento25 páginasRobot Balanceado Sobre Sus Ruedas TEORÍA DE CONTROL 2Byron Pinguil SánchezAún no hay calificaciones
- Caso Estudio Sistemas EmbebidosDocumento11 páginasCaso Estudio Sistemas Embebidosjosmel27Aún no hay calificaciones
- Servomecanismos AF4 Implementación de Una Tarjeta de Control de Servomotor.Documento11 páginasServomecanismos AF4 Implementación de Una Tarjeta de Control de Servomotor.Edwin IsraelAún no hay calificaciones
- Reporte Robot CopaDocumento22 páginasReporte Robot CopanekokanamealexisAún no hay calificaciones
- Informe Transportadora de FrutasDocumento15 páginasInforme Transportadora de FrutasSantiago Paredes PalomequeAún no hay calificaciones
- Practica 4 Lds MDocumento9 páginasPractica 4 Lds MOscar MedellinAún no hay calificaciones
- Informe 1 de Servomecanismos - Cañarte-España-Gualtor-PantojaDocumento12 páginasInforme 1 de Servomecanismos - Cañarte-España-Gualtor-PantojaCristian EspañaAún no hay calificaciones
- Practica 4 Lab. DSMDocumento10 páginasPractica 4 Lab. DSMSalvador Sanchez RosasAún no hay calificaciones
- Informe Final DinamicosDocumento12 páginasInforme Final Dinamicosmorenomagda028Aún no hay calificaciones
- Pract2 DSMDocumento9 páginasPract2 DSMMiguel SalasAún no hay calificaciones
- Practica 4 ServoDocumento14 páginasPractica 4 Servogilberto chavez0% (1)
- Laboratorio N4Documento8 páginasLaboratorio N4Sandro CentellasAún no hay calificaciones
- Lab01 Instrumentos IndustrialesDocumento17 páginasLab01 Instrumentos IndustrialesBrayan Arapa ApazaAún no hay calificaciones
- Proyecto Bloque 5 1 Diseño de Armario Con VariadoresDocumento2 páginasProyecto Bloque 5 1 Diseño de Armario Con VariadoresSkandynabusAún no hay calificaciones
- Cálculo de Empuje y Control de Dirección de Una Patrulla Costera Utilizando El Software MyOpenLabDocumento6 páginasCálculo de Empuje y Control de Dirección de Una Patrulla Costera Utilizando El Software MyOpenLabYosseline Vargas MezaAún no hay calificaciones
- TAREA - 02 - Informe de La Practica Con LOGO.Documento10 páginasTAREA - 02 - Informe de La Practica Con LOGO.SINDY GABRIELA GALARZA TRUJILLOAún no hay calificaciones
- Paper Pan & TiltDocumento5 páginasPaper Pan & TiltRolan DiazAún no hay calificaciones
- Practica de Lab. Instrumentacion 3Documento10 páginasPractica de Lab. Instrumentacion 3lcruz_86100% (1)
- Práctica 06 - Control de Servomotores - MT 83 - Equipo - 6Documento9 páginasPráctica 06 - Control de Servomotores - MT 83 - Equipo - 6MarianaAún no hay calificaciones
- Lab4 ActuadoresDocumento3 páginasLab4 ActuadoressebastianAún no hay calificaciones
- Laboratorio 2 MicroprocesadoresDocumento5 páginasLaboratorio 2 MicroprocesadoresJUAN SEBASTIAN DELGADO MATABANCHOYAún no hay calificaciones
- Modelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Documento6 páginasModelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Cristhian CasarrubiasAún no hay calificaciones
- Proyecto Final Del Curso de Control III - ImprimirDocumento10 páginasProyecto Final Del Curso de Control III - ImprimirWalter Mamani CcasaAún no hay calificaciones
- Articulo Control de Un Balancin Con Motor y HeliceDocumento3 páginasArticulo Control de Un Balancin Con Motor y HeliceUlises Flores RefugioAún no hay calificaciones
- Practica 5 LDSMDocumento12 páginasPractica 5 LDSMOscar MedellinAún no hay calificaciones
- Act9 Proyecto Final Pablo CervantesDocumento8 páginasAct9 Proyecto Final Pablo Cervantespabloing.tecinfoAún no hay calificaciones
- Seguidor de Linea BasicoDocumento10 páginasSeguidor de Linea BasicoRaul CadeteAún no hay calificaciones
- Arellano ZLDocumento179 páginasArellano ZLHansvan SalvadorAún no hay calificaciones
- Practica#6 LabDSMDocumento7 páginasPractica#6 LabDSMAngel AldapeAún no hay calificaciones
- Informe de Laboratorio I - RoboticaDocumento4 páginasInforme de Laboratorio I - RoboticaMarilyn OsorioAún no hay calificaciones
- Robot BalancinDocumento29 páginasRobot BalancinBryan VargasAún no hay calificaciones
- Informe de Laboratorio Celda de ManufacturaDocumento14 páginasInforme de Laboratorio Celda de ManufacturaJean Carlos Celis estradaAún no hay calificaciones
- Control ServoDocumento6 páginasControl ServoDulce AraizaAún no hay calificaciones
- Guia de AutomatizacionDocumento8 páginasGuia de AutomatizacionĶèvîñ ĆìThø KrAún no hay calificaciones
- UntitledDocumento8 páginasUntitledHernandez Badillo David JosueAún no hay calificaciones
- Articulo Control de Nivel PDFDocumento7 páginasArticulo Control de Nivel PDFWilfran-davidAristAún no hay calificaciones
- Lab. 07 - Aplicacion Logica de Control - 2023-02Documento2 páginasLab. 07 - Aplicacion Logica de Control - 2023-02Fernando MaqueAún no hay calificaciones
- LatexDocumento14 páginasLatexalvaro del cojoAún no hay calificaciones
- Práctica#11Documento6 páginasPráctica#11guido becerraAún no hay calificaciones
- infoPLC - Net - Domínguez - Proyecto de Programación y Puesta en Marcha de Tablero de Prácticas para Control de S PDFDocumento104 páginasinfoPLC - Net - Domínguez - Proyecto de Programación y Puesta en Marcha de Tablero de Prácticas para Control de S PDFelkin mezaAún no hay calificaciones
- Practica 2 PercepciónDocumento11 páginasPractica 2 PercepciónJulio Cesar Solano GonzalezAún no hay calificaciones
- Exposicion Practica Motor Paso A PasoDocumento22 páginasExposicion Practica Motor Paso A PasoMorales Magaña CarlosAún no hay calificaciones
- Practica 3 "Control de Motorreductores"Documento10 páginasPractica 3 "Control de Motorreductores"Victor ServinAún no hay calificaciones
- Informe Proyecto Final Lab Control 1Documento5 páginasInforme Proyecto Final Lab Control 1Andres Felipe GAún no hay calificaciones
- Practica#7 LabDSMDocumento6 páginasPractica#7 LabDSMAngel AldapeAún no hay calificaciones
- 4 Practica Ejemplo - Control de VelocidadDocumento6 páginas4 Practica Ejemplo - Control de VelocidadJose Enrique BGAún no hay calificaciones
- Practica 7 Sist. ProgDocumento12 páginasPractica 7 Sist. ProgIsaac EliuAún no hay calificaciones
- 10-Clasificacion de ObjetosDocumento4 páginas10-Clasificacion de ObjetoskaleehnaAún no hay calificaciones
- Monitoreo Motor CaterpillarDocumento10 páginasMonitoreo Motor CaterpillarTwisted LowellAún no hay calificaciones
- Practica 6 LDSMDocumento13 páginasPractica 6 LDSMOscar MedellinAún no hay calificaciones
- Actividad 6. Proyecto de Uso de Motores EléctricosDocumento5 páginasActividad 6. Proyecto de Uso de Motores Eléctricosjesusmdelgado000Aún no hay calificaciones
- Lab 2Documento10 páginasLab 2ZOILA ELIANA COAQUIRA MAMANIAún no hay calificaciones
- Proyecto de Control de Velocidad de Motor ContinuaDocumento23 páginasProyecto de Control de Velocidad de Motor ContinuaYoel Anibal Ascencio CharriAún no hay calificaciones
- Sistema de Seguimiento de Trayectoria de Un VehiculoDocumento5 páginasSistema de Seguimiento de Trayectoria de Un VehiculoRicardo SolorzanoAún no hay calificaciones
- Elaboración de programas de cnc para la fabricación de piezas por arranque de viruta. FMEH0109De EverandElaboración de programas de cnc para la fabricación de piezas por arranque de viruta. FMEH0109Calificación: 3.5 de 5 estrellas3.5/5 (2)
- I Examen Parcial (Grupo - 02) V.II-2019Documento6 páginasI Examen Parcial (Grupo - 02) V.II-2019Valeria ChavarríaAún no hay calificaciones
- Informe Laboratorio 4 Castro-ChavarríaDocumento8 páginasInforme Laboratorio 4 Castro-ChavarríaValeria ChavarríaAún no hay calificaciones
- Informe Laboratorio 2. Castro-ChavarríaDocumento13 páginasInforme Laboratorio 2. Castro-ChavarríaValeria ChavarríaAún no hay calificaciones
- TAREA Transferencia de CalorDocumento6 páginasTAREA Transferencia de CalorValeria ChavarríaAún no hay calificaciones
- Ensayo 1984Documento8 páginasEnsayo 1984Valeria ChavarríaAún no hay calificaciones
- Programar Variador de Frecuencia (VFD), Telemecanique Altivar 28Documento2 páginasProgramar Variador de Frecuencia (VFD), Telemecanique Altivar 28Valeria ChavarríaAún no hay calificaciones
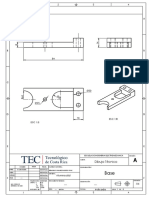
- Base A4Documento1 páginaBase A4Valeria ChavarríaAún no hay calificaciones
- Informe 4 RadiografiaDocumento4 páginasInforme 4 RadiografiaValeria ChavarríaAún no hay calificaciones
- VMware Vsphere 5.1 Editions Cheat Sheet - ESDocumento3 páginasVMware Vsphere 5.1 Editions Cheat Sheet - ESgynx3dAún no hay calificaciones
- Lenguaje EscaleraDocumento7 páginasLenguaje EscaleraEddy Salazar50% (2)
- Diagrama en BlancoDocumento1 páginaDiagrama en BlancoAndres LeytonAún no hay calificaciones
- Como Puedo Saber Si Un Sistema Linux Ha Sido ComprometidoDocumento4 páginasComo Puedo Saber Si Un Sistema Linux Ha Sido Comprometidotecedkar1260Aún no hay calificaciones
- Algorítmica y Programación PDFDocumento4 páginasAlgorítmica y Programación PDFCarlos Javier Guerrero FrancoAún no hay calificaciones
- Panel Posterior y Panel FrontalDocumento30 páginasPanel Posterior y Panel FrontalCristianAún no hay calificaciones
- Piad-207 TrabajofinalDocumento3 páginasPiad-207 TrabajofinalFavio MontalvoAún no hay calificaciones
- ReporteEntradas - Del - 01 01 2017al - 31 08 2017Documento85 páginasReporteEntradas - Del - 01 01 2017al - 31 08 2017aldoAún no hay calificaciones
- Estereotipos e InterfacesDocumento12 páginasEstereotipos e InterfacesVirixita ChanAún no hay calificaciones
- Lista Precios NC Partners 2Documento13 páginasLista Precios NC Partners 2Webster K. Huaynoca Acerico100% (1)
- C I Ber SeguridadDocumento7 páginasC I Ber SeguridadRodolfo Huerta CasanaAún no hay calificaciones
- Foro Tematico Plc.Documento3 páginasForo Tematico Plc.Miguel AngelAún no hay calificaciones
- Preguntas Base de DatosDocumento2 páginasPreguntas Base de DatosLuis Fernando Gutierrez DiazAún no hay calificaciones
- Mantenimiento de ComputadorasDocumento214 páginasMantenimiento de ComputadorasAlexOroncoyVilcaAún no hay calificaciones
- Glosario Recolección de Evidencia DigitalDocumento9 páginasGlosario Recolección de Evidencia DigitalAlex AgudeloAún no hay calificaciones
- Parcial - Escenario 4 - SEGUNDO BLOQUE-TEORICO - PRACTICO - SISTEMAS OPERACIONALES - (GRUPO2)Documento14 páginasParcial - Escenario 4 - SEGUNDO BLOQUE-TEORICO - PRACTICO - SISTEMAS OPERACIONALES - (GRUPO2)Javier Andres GonzalezAún no hay calificaciones
- Cambios, Parcheado, EtcDocumento2 páginasCambios, Parcheado, EtcYuhelUzhumakiAún no hay calificaciones
- Servicio Nacional de Aprendizaje Sena Procedimiento de Desarrollo CurricularDocumento10 páginasServicio Nacional de Aprendizaje Sena Procedimiento de Desarrollo CurricularJuan Esteban Hernandez RestrepoAún no hay calificaciones
- Generaciones de La Telefonia Celular CHMDDocumento7 páginasGeneraciones de La Telefonia Celular CHMDDiego ChavezAún no hay calificaciones
- Ejercicios DigitalesDocumento7 páginasEjercicios DigitalesAlvaro SanchezAún no hay calificaciones
- PDF Sa Tic I C Tema 3 Sistemas Operativos 12pDocumento12 páginasPDF Sa Tic I C Tema 3 Sistemas Operativos 12psararenteromartinezAún no hay calificaciones
- Práctica 7 UNITECDocumento6 páginasPráctica 7 UNITECManuel RodriguezAún no hay calificaciones
- Historia de HPDocumento30 páginasHistoria de HPNixon E. Saldaña QuinteroAún no hay calificaciones
- Manual Usuario FirmaEC v2.8.0Documento38 páginasManual Usuario FirmaEC v2.8.0ronaldogeAún no hay calificaciones
- Caracteristicas de La Primera Generación de ComputadorasDocumento14 páginasCaracteristicas de La Primera Generación de ComputadorasCarlos Luis Alzuru MartinezAún no hay calificaciones
- Taller Discos DurosDocumento2 páginasTaller Discos DurosSARAAún no hay calificaciones
- Manual de InstalacionDocumento4 páginasManual de InstalacionLuis Tinoco LacayoAún no hay calificaciones
- Programación Avanzada-01l-Práctica CalificadaDocumento32 páginasProgramación Avanzada-01l-Práctica CalificadaDaniel Quesada BejaranoAún no hay calificaciones
- Catálogo Electrónica Monkits-1Documento19 páginasCatálogo Electrónica Monkits-1Norbely Rodriguez BasultoAún no hay calificaciones
- Practicas de ArduinoDocumento129 páginasPracticas de ArduinoVania OdetteAún no hay calificaciones