También podría gustarte
- Tema4-MapaDeKarnaugh y RedesIterativasDocumento57 páginasTema4-MapaDeKarnaugh y RedesIterativasNelson SifontesAún no hay calificaciones
- GuiasPan Nivel IIDocumento10 páginasGuiasPan Nivel IINelson SifontesAún no hay calificaciones
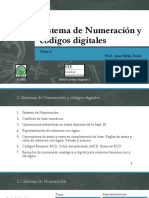
- Tema1 SistemasDigitalesDocumento22 páginasTema1 SistemasDigitalesNelson SifontesAún no hay calificaciones
- Tema2 CodigosDigitalesDocumento24 páginasTema2 CodigosDigitalesNelson SifontesAún no hay calificaciones
- Guias de Panaderia Nivel IDocumento11 páginasGuias de Panaderia Nivel INelson SifontesAún no hay calificaciones
- IE0323 G03 ExamenParcial IDocumento2 páginasIE0323 G03 ExamenParcial INelson SifontesAún no hay calificaciones
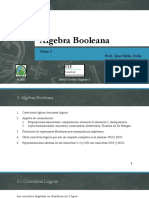
- Tema3 AlgebraBooleanaDocumento20 páginasTema3 AlgebraBooleanaNelson SifontesAún no hay calificaciones
- Guia Arroz 030119Documento2 páginasGuia Arroz 030119Nelson SifontesAún no hay calificaciones
- Pepc Elev-Lamina 2019-2Documento9 páginasPepc Elev-Lamina 2019-2Nelson SifontesAún no hay calificaciones
- Pepc Pesado Emp 2014 2Documento14 páginasPepc Pesado Emp 2014 2Nelson SifontesAún no hay calificaciones
- PEPC BOLA-BRAZO ART 2018-1 Ver2Documento5 páginasPEPC BOLA-BRAZO ART 2018-1 Ver2Nelson SifontesAún no hay calificaciones
- Guia Estrategia Contenidos para Blogs CorporativosDocumento35 páginasGuia Estrategia Contenidos para Blogs Corporativosfercho100% (2)
- Pirometro DTB EspDocumento21 páginasPirometro DTB EspNelson SifontesAún no hay calificaciones
- Lineamientos Gestión Docente IUPSM - 2021-2Documento10 páginasLineamientos Gestión Docente IUPSM - 2021-2Nelson SifontesAún no hay calificaciones
- Educacion Primaria BolivarianaDocumento102 páginasEducacion Primaria BolivarianaEriu100% (121)
- Entrevista A Adriana Puiggrós PDFDocumento15 páginasEntrevista A Adriana Puiggrós PDFNelson SifontesAún no hay calificaciones
- Preguntas Claves Inicio Del DoctoradoDocumento1 páginaPreguntas Claves Inicio Del DoctoradoNelson SifontesAún no hay calificaciones
- Resetear DT de FabricaDocumento6 páginasResetear DT de FabricaNelson SifontesAún no hay calificaciones
- Rif FundeagrosDocumento1 páginaRif FundeagrosNelson SifontesAún no hay calificaciones
- Datos Mundiales de Educacion - VenezuelaDocumento37 páginasDatos Mundiales de Educacion - VenezuelaVictoria Andrea Frisoli AriasAún no hay calificaciones
- Certificado Programacion CreativaDocumento1 páginaCertificado Programacion CreativaNelson SifontesAún no hay calificaciones
- Módulo de Control Electrónico (Electronic Module Control ECM) Del Kia SportageDocumento3 páginasMódulo de Control Electrónico (Electronic Module Control ECM) Del Kia SportagejbiscardiAún no hay calificaciones
- Mandala EpistemologicoDocumento21 páginasMandala EpistemologicoNelson Sifontes0% (1)
- Pepc Pesado Emp 2014 2Documento14 páginasPepc Pesado Emp 2014 2Nelson SifontesAún no hay calificaciones
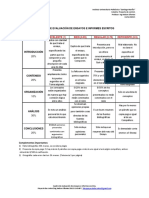
- PC20-1 Cuadro Evaluacion Ensayo-InformeDocumento1 páginaPC20-1 Cuadro Evaluacion Ensayo-InformeNelson SifontesAún no hay calificaciones
- Teoria Calculo Tarifa Por Honorarios ProfesionalesDocumento19 páginasTeoria Calculo Tarifa Por Honorarios ProfesionalesJesus Rafael Villarroel Rivas100% (2)
- Pepc Descripcion Elev-Lamina 2020-1 PDFDocumento3 páginasPepc Descripcion Elev-Lamina 2020-1 PDFNelson SifontesAún no hay calificaciones
- Pepc Plan Eval Elev-Lamina 2020-1Documento8 páginasPepc Plan Eval Elev-Lamina 2020-1Nelson SifontesAún no hay calificaciones
- Pepc Descripcion Elev-Lamina 2020-1 PDFDocumento3 páginasPepc Descripcion Elev-Lamina 2020-1 PDFNelson SifontesAún no hay calificaciones
- Practica de Laboratorio de Teoremas de Circuitos Eléctricos - #4.Documento7 páginasPractica de Laboratorio de Teoremas de Circuitos Eléctricos - #4.Gus MonvarAún no hay calificaciones
- ACTIVIDAD N°1 AUTOMATIZACION LL (Resuelto)Documento4 páginasACTIVIDAD N°1 AUTOMATIZACION LL (Resuelto)Jainer Antonio Cera MercadoAún no hay calificaciones
- Lab de Circuitos Electricos 2 UniDocumento32 páginasLab de Circuitos Electricos 2 UniGiraldoCarpioRamosAún no hay calificaciones
- 33 - El Diodo PIN 2Documento14 páginas33 - El Diodo PIN 2Roberto RumbautAún no hay calificaciones
- Electronica Basica 1Documento164 páginasElectronica Basica 1osc25% (4)
- Unidad 1 Maquinas ElectricasDocumento10 páginasUnidad 1 Maquinas ElectricasArkAún no hay calificaciones
- Análisis de Computadoras: SESIÓN 4 - 26/11/2022Documento64 páginasAnálisis de Computadoras: SESIÓN 4 - 26/11/2022Jesus R. V. PerezAún no hay calificaciones
- Calculo CMRRDocumento11 páginasCalculo CMRRFederico BrunoAún no hay calificaciones
- Guia Virtual de Asociacion de CapacitoresDocumento5 páginasGuia Virtual de Asociacion de CapacitoresJesús Alberto baggos MolinaresAún no hay calificaciones
- Analisis de Circuito en ArduinoDocumento4 páginasAnalisis de Circuito en ArduinoRaquel UmañaAún no hay calificaciones
- Taller de Ejecicios de Corriente AlternaDocumento3 páginasTaller de Ejecicios de Corriente AlternaDiego NuñezAún no hay calificaciones
- Protocolo Drywall STDDocumento1 páginaProtocolo Drywall STDobra1.serconperAún no hay calificaciones
- Banco de Transformadores MonofásicosDocumento3 páginasBanco de Transformadores Monofásicosjavier laraAún no hay calificaciones
- ZGX2007244W2 315Documento1 páginaZGX2007244W2 315El Gordito FrankAún no hay calificaciones
- Pruebilla N°1 Rectificador de Onda Completa Con CondensadorDocumento7 páginasPruebilla N°1 Rectificador de Onda Completa Con CondensadorPablo ValeriaAún no hay calificaciones
- UF0149 3.1 Electrónica BásicaDocumento39 páginasUF0149 3.1 Electrónica Básicagam3rsbejAún no hay calificaciones
- Zkteco F22id PDFDocumento2 páginasZkteco F22id PDFAlberto J. MillanAún no hay calificaciones
- Practica1 KevinAlvaradoDocumento13 páginasPractica1 KevinAlvaradokevin sortoAún no hay calificaciones
- Ficha Tecnica Powermax 85Documento4 páginasFicha Tecnica Powermax 85mecatronica utAún no hay calificaciones
- EXPERIENCIA 5 ML125 - C FinalDocumento19 páginasEXPERIENCIA 5 ML125 - C FinalGenaro Antonio Montoya JuarezAún no hay calificaciones
- Exp 7Documento7 páginasExp 7Jesus Miguel MoralesAún no hay calificaciones
- ExamennHFC 106038dd8cf11b1Documento3 páginasExamennHFC 106038dd8cf11b1Diana NaicipeAún no hay calificaciones
- Resumenes de Sistemas ElectronicosDocumento6 páginasResumenes de Sistemas ElectronicosjoseAún no hay calificaciones
- Practica N3Documento15 páginasPractica N3Eduardo MunozAún no hay calificaciones
- Trabajo Práctico #1 - RuidoDocumento2 páginasTrabajo Práctico #1 - RuidoRodrigo LopezAún no hay calificaciones
- Pastillas TermomagnéticasDocumento4 páginasPastillas TermomagnéticasAlejandro AragonAún no hay calificaciones
- 4 Oximetro de Pulso SP-20 + TemperaturaDocumento4 páginas4 Oximetro de Pulso SP-20 + TemperaturaDante Oblitas gallardoAún no hay calificaciones
- Guia Apoyo TCA785Documento8 páginasGuia Apoyo TCA785Sepúlveda ArayaAún no hay calificaciones
- Parcial 1 PDFDocumento1 páginaParcial 1 PDFAntonio ChoquevilcaAún no hay calificaciones
- Taller Final OptimizaciónDocumento3 páginasTaller Final OptimizaciónMjAún no hay calificaciones