También podría gustarte
- Descripción Detallada Del PIC16F877ADocumento65 páginasDescripción Detallada Del PIC16F877ARamos CornelioAún no hay calificaciones
- Assembler y C Con ATMEGA 2560Documento14 páginasAssembler y C Con ATMEGA 2560diedroidAún no hay calificaciones
- Programa Que Controle La Intensidad Luminosa en Una Lámpara Incandescente Alimentada Con C.A. (Dimmer) EnsambladorDocumento13 páginasPrograma Que Controle La Intensidad Luminosa en Una Lámpara Incandescente Alimentada Con C.A. (Dimmer) EnsambladorJoseAún no hay calificaciones
- Descripcion de Puertos y RetardosDocumento17 páginasDescripcion de Puertos y RetardosVerónica Noguera VillarrealAún no hay calificaciones
- Preparatorio Sistemas Micro-Procesados (Barrido Display)Documento4 páginasPreparatorio Sistemas Micro-Procesados (Barrido Display)xavier2ramos-1Aún no hay calificaciones
- Trabajo Final MicroDocumento80 páginasTrabajo Final MicroJonathan Valentin100% (1)
- Manejo de PerifericosDocumento135 páginasManejo de PerifericosGabby Michelle OrtizAún no hay calificaciones
- Programación de microcontroladores ATmega con división binariaDocumento4 páginasProgramación de microcontroladores ATmega con división binariaAngelogc2014Aún no hay calificaciones
- Pic16f877 en Español2Documento62 páginasPic16f877 en Español2silviog100% (56)
- Manejo de TablasDocumento5 páginasManejo de TablasPabloAún no hay calificaciones
- Clase 7 Manejo de Puertos Entrada y SalidaDocumento9 páginasClase 7 Manejo de Puertos Entrada y SalidaDanilo Andre LuqueAún no hay calificaciones
- Ejercicios Pic C CompilerDocumento11 páginasEjercicios Pic C CompilerJhon Pichihua H100% (1)
- Programación de microcontroladores ATMEL en ASM: Multiplicación de números y visualización en displays hexadecimalesDocumento8 páginasProgramación de microcontroladores ATMEL en ASM: Multiplicación de números y visualización en displays hexadecimalesIan BaqueroAún no hay calificaciones
- Programación de los Microcontroladores 8052/8051 (IIDocumento11 páginasProgramación de los Microcontroladores 8052/8051 (IIMarco CardenasAún no hay calificaciones
- Programación Del MicrocontroladorDocumento13 páginasProgramación Del Microcontroladorodin11611Aún no hay calificaciones
- Programación de Microcontroladores - Control de Velocidad de Motores DC y LedsDocumento9 páginasProgramación de Microcontroladores - Control de Velocidad de Motores DC y LedsPatricio Andres Vergara PeñaAún no hay calificaciones
- Instrucciones de Programación para PLCDocumento8 páginasInstrucciones de Programación para PLCGere Vale100% (1)
- Circuito de SemaforoDocumento18 páginasCircuito de SemaforoFrank Herrera Ospino100% (1)
- AVR Instrucciones P PDFDocumento9 páginasAVR Instrucciones P PDFkrisAún no hay calificaciones
- Pic 16F88XDocumento21 páginasPic 16F88XGutka PortilloAún no hay calificaciones
- Contador DigitalDocumento4 páginasContador DigitalEnrique Adrián FiorenzaAún no hay calificaciones
- Clase Antirebote y Display 7 SegmentosDocumento12 páginasClase Antirebote y Display 7 SegmentosAlejandra Acosta100% (1)
- Codificación y Revisión (A, B y C), VICTOR ATENCIO, HEBERTO URRIBARRI, MICRO I 2020CDocumento19 páginasCodificación y Revisión (A, B y C), VICTOR ATENCIO, HEBERTO URRIBARRI, MICRO I 2020CVictor AtencioAún no hay calificaciones
- Clase 5 V2Documento27 páginasClase 5 V2Sebastian reinosa PerezAún no hay calificaciones
- Programar PLC 8E 8S PIC16F84Documento5 páginasProgramar PLC 8E 8S PIC16F84Gaston Solorza LeyvaAún no hay calificaciones
- Clase 4 V3Documento14 páginasClase 4 V3Sebastian reinosa PerezAún no hay calificaciones
- Proyecto Matriz de Leds SencillaDocumento8 páginasProyecto Matriz de Leds SencillaAlexander Aguiño ViverosAún no hay calificaciones
- Manejo de Matriz de LedDocumento7 páginasManejo de Matriz de LedmarcosolveraAún no hay calificaciones
- Guia de VideoTutoriales HeTProDocumento89 páginasGuia de VideoTutoriales HeTProCristian Q. RodríguezAún no hay calificaciones
- Practica2 MicrocontroladoresDocumento11 páginasPractica2 MicrocontroladoresEzequiel DiazAún no hay calificaciones
- Practica 15 RelojDocumento12 páginasPractica 15 RelojEmmanuel GonzalezAún no hay calificaciones
- Proyecto Manejo Del Puerto Paralelo Desde Ensamblador Descripción GeneralDocumento4 páginasProyecto Manejo Del Puerto Paralelo Desde Ensamblador Descripción GeneralGreg HernandezAún no hay calificaciones
- Tutorial Pic 2007Documento12 páginasTutorial Pic 2007jon alvarezAún no hay calificaciones
- Variador de Vrms - PIC16f877ADocumento16 páginasVariador de Vrms - PIC16f877AArmando CajahuaringaAún no hay calificaciones
- Micros 05 Gpio EnsamDocumento28 páginasMicros 05 Gpio EnsamYeison Estiven Delgado OrdonezAún no hay calificaciones
- Ud3. Automatas Programables Tema 4 Tsx17Documento10 páginasUd3. Automatas Programables Tema 4 Tsx17Daniel IorgaAún no hay calificaciones
- Teclado Hex InterrupcionesDocumento23 páginasTeclado Hex InterrupcionesWalter HilasacaAún no hay calificaciones
- P 10Documento13 páginasP 10Faty Cortez SantamariaAún no hay calificaciones
- Modulación PWM con ATmega8Documento42 páginasModulación PWM con ATmega8Jose Ruben TorresHortaAún no hay calificaciones
- Practica 2 - Puertos de Entrada y SalidaDocumento11 páginasPractica 2 - Puertos de Entrada y SalidaJose PucAún no hay calificaciones
- Problemas AVRDocumento5 páginasProblemas AVRReyner LozaAún no hay calificaciones
- SC-AT5-Controladores Logicos ProgramablesDocumento27 páginasSC-AT5-Controladores Logicos ProgramablesmarianaAún no hay calificaciones
- Informe de Laboratorio 9Documento10 páginasInforme de Laboratorio 9juan13uAún no hay calificaciones
- Pic 16 F 877 ADocumento7 páginasPic 16 F 877 AXFhernandox ManAún no hay calificaciones
- Logica Digital Examen de InternteDocumento3 páginasLogica Digital Examen de InternteUreña Personaje Jesus UreñaAún no hay calificaciones
- Practica 2 - Puertos de Entrada y SalidaDocumento11 páginasPractica 2 - Puertos de Entrada y SalidaAlam Castillo HerreraAún no hay calificaciones
- Capítulo 1Documento14 páginasCapítulo 1Héctor SánchezAún no hay calificaciones
- Registros STATUS, INTCON y OPTION del PIC16F84Documento1 páginaRegistros STATUS, INTCON y OPTION del PIC16F84herzausstein18Aún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Aprende a Programar en MATLABDe EverandAprende a Programar en MATLABCalificación: 3.5 de 5 estrellas3.5/5 (11)
- C 3 MicrocontroladoresDocumento36 páginasC 3 Microcontroladorestati4Aún no hay calificaciones
- Tesis Sistemas DispensadorDocumento115 páginasTesis Sistemas DispensadorDavid Leonardo Higuera CamargoAún no hay calificaciones
- 10 Consejo para Redisenar Tu Sitio WebDocumento18 páginas10 Consejo para Redisenar Tu Sitio WebSergio Andrés PazAún no hay calificaciones
- Ficha Técnica MiCanDocumento3 páginasFicha Técnica MiCanDavid Leonardo Higuera CamargoAún no hay calificaciones
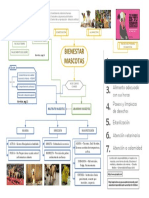
- Bienestar MascotasDocumento1 páginaBienestar MascotasDavid Leonardo Higuera CamargoAún no hay calificaciones
- La ética de la responsabilidad y el respeto a las mascotasDocumento69 páginasLa ética de la responsabilidad y el respeto a las mascotasLuis MoAún no hay calificaciones
- Manual de Termoformado PDFDocumento91 páginasManual de Termoformado PDFLuis Martinez100% (1)
- Tabla PesosDocumento1 páginaTabla PesosNahomy Vilca MacedoAún no hay calificaciones
- Maxima MedianaDocumento37 páginasMaxima MedianaJose ANAún no hay calificaciones
- Sistemas AnalogicosDocumento9 páginasSistemas AnalogicosDavid Leonardo Higuera CamargoAún no hay calificaciones
- Ejercicio Electronica de PotenciaDocumento1 páginaEjercicio Electronica de PotenciaDavid Leonardo Higuera CamargoAún no hay calificaciones
- Ebook Reporte de Industria Ecommerce 2018 PDFDocumento82 páginasEbook Reporte de Industria Ecommerce 2018 PDFeocampom0% (1)
- PMP Colombia Alimentos Mascotas 2017Documento20 páginasPMP Colombia Alimentos Mascotas 2017jero082010Aún no hay calificaciones
- Lab No 1 Puente H - Copy 1Documento8 páginasLab No 1 Puente H - Copy 1David Leonardo Higuera CamargoAún no hay calificaciones
- Práctica 2 Circuitos ResonantesDocumento6 páginasPráctica 2 Circuitos ResonantesDavid Leonardo Higuera CamargoAún no hay calificaciones
- Fuentes ReguladasDocumento9 páginasFuentes ReguladasDavid Leonardo Higuera CamargoAún no hay calificaciones
- Maxima MedianaDocumento37 páginasMaxima MedianaJose ANAún no hay calificaciones
- Teoría de La ComunicaciónDocumento401 páginasTeoría de La ComunicaciónClever HuayraAún no hay calificaciones
- Lectura de Puertos Atmega32ADocumento16 páginasLectura de Puertos Atmega32ADavid Leonardo Higuera CamargoAún no hay calificaciones
- ENEL CODENSA Guia para La Presentacion de Proyectos V4Documento31 páginasENEL CODENSA Guia para La Presentacion de Proyectos V4marioAún no hay calificaciones
- Automatico Legrand C16 DX3Documento1 páginaAutomatico Legrand C16 DX3JuanFuentesBecerraAún no hay calificaciones
- Instructivo Medicion de Descargas Parciales en Cables Colombia2 PDFDocumento9 páginasInstructivo Medicion de Descargas Parciales en Cables Colombia2 PDFMiguel J. CruzAún no hay calificaciones
- Maxima Corriente Corto en Conductor - Conductores EléctricosDocumento1 páginaMaxima Corriente Corto en Conductor - Conductores EléctricosMauricio González CaycedoAún no hay calificaciones
- Medidor Multifuncion - F650Documento225 páginasMedidor Multifuncion - F650thony_181Aún no hay calificaciones
- Tomo 42 - COMPUTADORAS AUTOMOTRICESDocumento87 páginasTomo 42 - COMPUTADORAS AUTOMOTRICESGustavo Primiterra100% (1)
- Memoria DescriptivaDocumento9 páginasMemoria DescriptivaS. SANTA CRUZ CARRASCOAún no hay calificaciones
- Capítulo 11 Examen-ESPAÑOLDocumento4 páginasCapítulo 11 Examen-ESPAÑOLmalu818Aún no hay calificaciones
- GLAB-S03 - Trabajo Grupal XDDocumento7 páginasGLAB-S03 - Trabajo Grupal XDSara Del Pilar Bravo QuinAún no hay calificaciones
- PROFINET COMUNICACIÓN ENTRE PLCs S7-1200Documento38 páginasPROFINET COMUNICACIÓN ENTRE PLCs S7-1200Carlos Eduardo Vásquez BolañosAún no hay calificaciones
- Practica 1Documento5 páginasPractica 1Christofer BarreraAún no hay calificaciones
- Conexiones externas PCDocumento5 páginasConexiones externas PCIvánAún no hay calificaciones
- EP00XX-IFU 10-2021-07 - 170x120Documento144 páginasEP00XX-IFU 10-2021-07 - 170x120DAGINC SASAún no hay calificaciones
- Circuitos Digitales-Laboratorio 3Documento12 páginasCircuitos Digitales-Laboratorio 3Jairo Johan Colonia GuzmanAún no hay calificaciones
- Logica Cableada 2Documento10 páginasLogica Cableada 2Ömär UrbinaAún no hay calificaciones
- 1 - Gfpi-F-019 - Guia Redes Especificar RecursosDocumento8 páginas1 - Gfpi-F-019 - Guia Redes Especificar RecursosAni SuescunAún no hay calificaciones
- Manual Peugeot Partner 1.9 D DW8B (Wjy) Delphi DCN2 1997 2007 PineraDocumento5 páginasManual Peugeot Partner 1.9 D DW8B (Wjy) Delphi DCN2 1997 2007 PineraMatias Filipponi100% (1)
- Cristian - Ariza - Tarea 1Documento10 páginasCristian - Ariza - Tarea 1acirema crackAún no hay calificaciones
- Preguntas de Repaso (27 de Sept Del 2013)Documento3 páginasPreguntas de Repaso (27 de Sept Del 2013)linkenses1723Aún no hay calificaciones
- Trabajo Final GrupalDocumento18 páginasTrabajo Final GrupalYamell PeñaAún no hay calificaciones
- Tarea Redes de Secuencia y Fallas AsimetricasDocumento2 páginasTarea Redes de Secuencia y Fallas AsimetricasJOHNAún no hay calificaciones
- Sistema de carga y arranque automotrizDocumento5 páginasSistema de carga y arranque automotrizMisael CHUMBES SAFORASAún no hay calificaciones
- Problemas ResueltosDocumento53 páginasProblemas ResueltosHomeroOjeda50% (2)
- SecoGear PV17.5 Insulation Switchgear UserManual 2012 ESDocumento44 páginasSecoGear PV17.5 Insulation Switchgear UserManual 2012 ESnelson verjan rocaAún no hay calificaciones
- Transmisor de Presión Rosemount 3051Documento34 páginasTransmisor de Presión Rosemount 3051Karen Vásconez0% (1)
- UD1. Subestaciones. Tipos y ConfiguracionesDocumento57 páginasUD1. Subestaciones. Tipos y ConfiguracionesManuel Tomás Gordillo GarcíaAún no hay calificaciones
- Transformadores monofásicos y trifásicos - Características y regulaciónDocumento24 páginasTransformadores monofásicos y trifásicos - Características y regulacióngabriela casablancaAún no hay calificaciones
- Requisiciones 2017Documento51 páginasRequisiciones 2017miguelAún no hay calificaciones
- Tubo Led Gobantes PDFDocumento1 páginaTubo Led Gobantes PDFricardoAún no hay calificaciones
- Manual Sistema de Carga Alternador Bateria y PruebasDocumento34 páginasManual Sistema de Carga Alternador Bateria y PruebasRamon pujolsAún no hay calificaciones