También podría gustarte
- Plano de UPC San MIGUELDocumento1 páginaPlano de UPC San MIGUELJhony Francisco ZuñigaAún no hay calificaciones
- Solucionario de Examen Parcial de Zapata Aislada 128586 Downloable 720704Documento9 páginasSolucionario de Examen Parcial de Zapata Aislada 128586 Downloable 720704Roger Geronimo JiménezAún no hay calificaciones
- INFORME 06-Mecanica de FluidosDocumento9 páginasINFORME 06-Mecanica de FluidosDiana SujeyAún no hay calificaciones
- DinamicaDocumento51 páginasDinamicaDIEGO EDERSON MENDEZ AYALAAún no hay calificaciones
- Informe de Laboratorio 2Documento35 páginasInforme de Laboratorio 2FABIO ANDRES GUZMAN ARROYOAún no hay calificaciones
- Clase 02 - Dinamica EstructuralDocumento31 páginasClase 02 - Dinamica EstructuralKevin Arnold Piro Centeno100% (1)
- Informe de Laboratorio - Ley de HookeDocumento15 páginasInforme de Laboratorio - Ley de HookeMauricio Ricardo0% (1)
- 2016-1 Uni Cinematica de Cuerpo Rigido en El Plano PDFDocumento62 páginas2016-1 Uni Cinematica de Cuerpo Rigido en El Plano PDFRoberto Carlos Quispe MontalvoAún no hay calificaciones
- Semanas 5 y 6 Cin de Cuerpo Rig-2d 2019-1Documento65 páginasSemanas 5 y 6 Cin de Cuerpo Rig-2d 2019-1Ingrid Valeria Salas HuamaniAún no hay calificaciones
- Guia 4 Dinamica 2017-1uDocumento10 páginasGuia 4 Dinamica 2017-1uWAGNER HUAYCHA CONDEAún no hay calificaciones
- Guias Dinamica (1,2,3 y 4)Documento33 páginasGuias Dinamica (1,2,3 y 4)Paola Geraldine Hinostroza RamirezAún no hay calificaciones
- Propiedades InercialesDocumento13 páginasPropiedades InercialesJan Paul Infante LlerenaAún no hay calificaciones
- Examen de Entrada - Resistencia de MaterialesDocumento2 páginasExamen de Entrada - Resistencia de MaterialesDhayanara Abilia Cardenas HuamanAún no hay calificaciones
- Diapositiva 1Documento11 páginasDiapositiva 1Efrain Flores Romero100% (1)
- Cap. 3 Equilibrio PDFDocumento40 páginasCap. 3 Equilibrio PDFQuowaAún no hay calificaciones
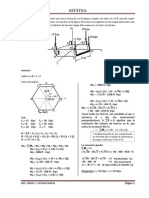
- Tarea Estatica1Documento4 páginasTarea Estatica1SmashSamAún no hay calificaciones
- 1er Examen Analisis I Teoria 2022 2do SemDocumento1 página1er Examen Analisis I Teoria 2022 2do SemBenjamín HTAún no hay calificaciones
- Ejercicios Resueltos Singer Grupo 19 PDFDocumento9 páginasEjercicios Resueltos Singer Grupo 19 PDFMANFREED CARVAJAL PILLIMUEAún no hay calificaciones
- Solucionario de Examen Parcial - EC114-G 2017-IDocumento10 páginasSolucionario de Examen Parcial - EC114-G 2017-IAnonymous M8d0sXAún no hay calificaciones
- Solucion (02) Examen ParcialDocumento6 páginasSolucion (02) Examen ParcialYessi YtzAún no hay calificaciones
- TrabajoFinal ConcretoReforzado Grupo 6Documento79 páginasTrabajoFinal ConcretoReforzado Grupo 6María Del Pilar ccAún no hay calificaciones
- Repaso Trabajo PotenciaDocumento2 páginasRepaso Trabajo PotenciaCristian Alexander100% (1)
- FFR 99 J PDFDocumento12 páginasFFR 99 J PDFJoseph NinaAún no hay calificaciones
- Cables Semana 39-1Documento14 páginasCables Semana 39-1alberto pachecoAún no hay calificaciones
- PRESENTACIONDocumento66 páginasPRESENTACIONCiteerbotMoyaAún no hay calificaciones
- Guia 2017Documento35 páginasGuia 2017julianAún no hay calificaciones
- FÍSICA Semana3Documento38 páginasFÍSICA Semana3carlos rubio garciaAún no hay calificaciones
- Monografia de Ecuaciones Diferenciales ExactasDocumento9 páginasMonografia de Ecuaciones Diferenciales ExactasEros Diaz Puyo0% (1)
- IC 04 Radio Mínimo - Sobreancho PDFDocumento35 páginasIC 04 Radio Mínimo - Sobreancho PDFblanca100% (1)
- Guía 01 PPT Funciones Complejas Clases LunesDocumento14 páginasGuía 01 PPT Funciones Complejas Clases LunesMIJAELAún no hay calificaciones
- Practica DirigidaDocumento7 páginasPractica DirigidaAnthony Kenneth ApazaAún no hay calificaciones
- Ejercicios Tarea1Documento9 páginasEjercicios Tarea1Adriana OlmedoAún no hay calificaciones
- Maestria Informatica UNTDocumento2 páginasMaestria Informatica UNTIngeniero DelphiAún no hay calificaciones
- Ejemplo 2.8Documento6 páginasEjemplo 2.8Alexander SanchezAún no hay calificaciones
- Segunda Practica 2012-1Documento2 páginasSegunda Practica 2012-1Tito Vilchez100% (2)
- Informe 03 Fisica IIDocumento20 páginasInforme 03 Fisica IIDiego Bautista0% (2)
- Examen FinalDocumento6 páginasExamen FinalAnaly Del Carmen Melendres BermeoAún no hay calificaciones
- Fourier Classpad PDFDocumento4 páginasFourier Classpad PDFMarcoAún no hay calificaciones
- Secciones EstáticaDocumento4 páginasSecciones EstáticaDanner Jamil Julca Leon100% (1)
- Silva Ramirez P1 ADocumento2 páginasSilva Ramirez P1 APorlles Herrera Angelo Jesús100% (1)
- Dinamica 11.24Documento2 páginasDinamica 11.24kevinAún no hay calificaciones
- Lestind03 PDFDocumento8 páginasLestind03 PDFRodrigo Rueda LujánAún no hay calificaciones
- Christian Erik Urbe Rios - 271047 - 0Documento3 páginasChristian Erik Urbe Rios - 271047 - 0kilder kenio Mallqui AguilarAún no hay calificaciones
- EJERCICIO PLANO 02-ModeloDocumento1 páginaEJERCICIO PLANO 02-ModeloALEXIS JUNIOR TAIRO AQUINOAún no hay calificaciones
- 05 DinámicaDocumento5 páginas05 DinámicaJhon83236 VargasAún no hay calificaciones
- Flexocompresión CompuestaDocumento13 páginasFlexocompresión CompuestaDivensAún no hay calificaciones
- Practica Calficada 01 B 2021 I CinemáticaDocumento2 páginasPractica Calficada 01 B 2021 I CinemáticaJavier CoronadoAún no hay calificaciones
- Trabajo de CampoDocumento19 páginasTrabajo de Campopult72Aún no hay calificaciones
- EXAMEN MODELO-OSINERGMIN 2019 Manual - Razonamiento - Matematico PDFDocumento14 páginasEXAMEN MODELO-OSINERGMIN 2019 Manual - Razonamiento - Matematico PDFDante Cruz CLAún no hay calificaciones
- Semana #14 (Unac 2018)Documento12 páginasSemana #14 (Unac 2018)Brayan Bravo100% (1)
- Examen Final Estatica Upn Ing CivilDocumento1 páginaExamen Final Estatica Upn Ing Civilchristianpe1Aún no hay calificaciones
- Solucion Del Fii Examen ParcialDocumento6 páginasSolucion Del Fii Examen ParcialYacqui Adeli OblitasAún no hay calificaciones
- 2do Parcial + FormularioDocumento15 páginas2do Parcial + FormularioGuillermo Chuquimia RojasAún no hay calificaciones
- Cap2 ProblemasDocumento10 páginasCap2 ProblemasIvan Quinto PaAún no hay calificaciones
- Determinación de Magnitud de Sismos A Partir de Registros SismográficosDocumento1 páginaDeterminación de Magnitud de Sismos A Partir de Registros SismográficosPatricio Bustos Valenzuela100% (1)
- YONYDocumento1 páginaYONYemp xX xXAún no hay calificaciones
- Ejes GiradosDocumento19 páginasEjes GiradosAnny CatAún no hay calificaciones
- Taller Ef Dinamica 2017 2Documento22 páginasTaller Ef Dinamica 2017 2Manuel GonzalesAún no hay calificaciones
- Ejercicio Practico Uap 2018-1Documento1 páginaEjercicio Practico Uap 2018-1EMERITO HUAMAN CHANTAAún no hay calificaciones
- Vocabulario para El CursoDocumento22 páginasVocabulario para El Cursojsaavedra6830Aún no hay calificaciones
- Semana 4 2020-2Documento66 páginasSemana 4 2020-2Yamile EscribaAún no hay calificaciones
- Semana 4a 2022-2Documento47 páginasSemana 4a 2022-2rodrigo leonAún no hay calificaciones
- Semana 4a Uni-Fim 2023-1Documento74 páginasSemana 4a Uni-Fim 2023-1ARTURO ALEJANDRO DIAZ ORTIZAún no hay calificaciones
- Cinematica Del Cuerpo RigidoDocumento60 páginasCinematica Del Cuerpo Rigidomilner_mirkoAún no hay calificaciones
- Dinamica 2Documento44 páginasDinamica 2Jhony Francisco ZuñigaAún no hay calificaciones
- Dinamica 1Documento53 páginasDinamica 1Jhony Francisco ZuñigaAún no hay calificaciones
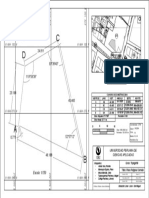
- Topografía Trabajo de CampoDocumento61 páginasTopografía Trabajo de CampoJhony Francisco ZuñigaAún no hay calificaciones
- Guía Unidad 3 Mat115 2020Documento17 páginasGuía Unidad 3 Mat115 2020Natalia BermudezAún no hay calificaciones
- Previo 5 C.DDocumento3 páginasPrevio 5 C.DAlberto CañongoAún no hay calificaciones
- Cuestionario de FisicaDocumento5 páginasCuestionario de FisicaJhadDer Neira SánchezAún no hay calificaciones
- S01.s3 - Resolver Ejercicios de CAF2Documento14 páginasS01.s3 - Resolver Ejercicios de CAF2Lucero VillantoyAún no hay calificaciones
- Efectos de La Intención Consciente de Los Individuos Sobre La Estructura Del Agua en El Ámbito de Las Ciencias AmbientalesDocumento130 páginasEfectos de La Intención Consciente de Los Individuos Sobre La Estructura Del Agua en El Ámbito de Las Ciencias AmbientalesCarol Mora PlaAún no hay calificaciones
- P. Dirigida 4 - T1Documento5 páginasP. Dirigida 4 - T1MecartistAún no hay calificaciones
- Trabajo Final (Fem, Corriente Directa, Imanes)Documento37 páginasTrabajo Final (Fem, Corriente Directa, Imanes)Delmiza Esquivel IngaAún no hay calificaciones
- 1 Magnitudes Fisicas OK UltimoDocumento15 páginas1 Magnitudes Fisicas OK UltimoJhonatan Arellano MamaniAún no hay calificaciones
- 7 - Mecánica de FluidosDocumento16 páginas7 - Mecánica de FluidosKency LópezAún no hay calificaciones
- GUÍA Momento de Inercia y Energia RotacionalDocumento15 páginasGUÍA Momento de Inercia y Energia Rotacionallorena cortesAún no hay calificaciones
- Estatica I (A1)Documento4 páginasEstatica I (A1)INGRID SHOMARA VARGAS YUCAAún no hay calificaciones
- Qué Es Un Campo GravitatorioDocumento3 páginasQué Es Un Campo GravitatorioJuan VelezAún no hay calificaciones
- Laboratorio1-Ucsm-Maquinas ElectricasDocumento7 páginasLaboratorio1-Ucsm-Maquinas ElectricasKevin Amaña FloresAún no hay calificaciones
- Balanzas de Fisher 12467 Weigh To Go Brochure - ESDocumento8 páginasBalanzas de Fisher 12467 Weigh To Go Brochure - ESBERENICE RINCONAún no hay calificaciones
- TRABAJO LINEAS - XLSMDocumento99 páginasTRABAJO LINEAS - XLSMEdison CatotaAún no hay calificaciones
- Instrumentos para Medir MasaDocumento5 páginasInstrumentos para Medir MasaMARÍA JOSÉ HENAO BRETTONAún no hay calificaciones
- Aprendizaje-Basado-En ProyectosDocumento3 páginasAprendizaje-Basado-En ProyectosDainer CorreaAún no hay calificaciones
- Tarea No. 1 Mecánica Analítica 1Documento23 páginasTarea No. 1 Mecánica Analítica 1Soluciones LemarkAún no hay calificaciones
- 2 +La+estructura+de+la+luz+libro+2+KheseDocumento125 páginas2 +La+estructura+de+la+luz+libro+2+KheseTania Roca Avila100% (1)
- Conservacion de La Energia Mecanica - ImprimirDocumento6 páginasConservacion de La Energia Mecanica - ImprimirGabriela Corma100% (1)
- Tarea Newton ExamenDocumento2 páginasTarea Newton ExamenCamille Ivette MedinaAún no hay calificaciones
- Ejercicios Sobre InteraccionesDocumento7 páginasEjercicios Sobre InteraccionesSebastianForeroAún no hay calificaciones
- Medición de Flujo-P55Documento38 páginasMedición de Flujo-P55Alex QuispilloAún no hay calificaciones
- Informe Segunda Seccion Laboratorio FisicaDocumento12 páginasInforme Segunda Seccion Laboratorio FisicaJennifer Valenzuela100% (1)
- AntisismicaDocumento12 páginasAntisismicaPaulina FloopAún no hay calificaciones
- Fuerza Sobre Una BarraDocumento7 páginasFuerza Sobre Una BarraAgustin Varela AcevedoAún no hay calificaciones
- Informe-9 TerminadoDocumento6 páginasInforme-9 TerminadoArturo Vasquez Zelaya0% (1)